KONSEP DASAR SISTEM PENGATURAN Sistem Pengaturan adalah Suatu





 Air Diagram Blok Sistem Level Air h yg.")

 adalah : Sistem Pengaturan")







 kedalam persamaan aljabar dalam")
 = f(t) e-st dt 0 F(s) = fungsi laplace f(t) =")



 adalah fungsi unit step")
 dalam fungsi Y(s) kedalam akar-akarnya: Ekpansi")
 dalam bentuk pecahan parsial menjadi Dengan invers transformasi Laplace (di dapat dari")

 lazimnya diberikan")



=N(s)/D(s): • Dalam Mat.")

 merup. Fs. Tak lenear apakah f(t) bisa ditransformasi laplacekan")
![• Transfer Function (Fungsi Alih) adalah : =G(s)= [output]/ [input]t(0)=0 Komentar Fungsi Alih](https://slidetodoc.com/presentation_image/0935f23535d244aa083f1e4c30cf6e4a/image-32.jpg "• Transfer Function (Fungsi Alih) adalah : =G(s)= [output]/ [input]t(0)=0 Komentar Fungsi Alih")




 G(s) Y(s) Diagram Blok suatu sistem q Hubungan antara output")
 + - Titik Percabangan E(s) Y(s)")
:")
 R(s) + - E(s) G 1(s) U")
 terhadap gangguan D(s), Response Y(s) terhadap referensi input R(s), dengan measumsikan gangguan")
 Y(s) G 1(s) G 2(s) Gk(s) G(s) Fungsi Transfer")
 R(s) G 2(s) + + + Gk(s) Fungsi Transfer hubungan paralel:")
 G 1(s) + Y(s) - + G 2(s) Fungsi Transfer G(s)")



. Open-Loop")





G 1 G 2")




 thd. Analisis Sistem Kontrol • Sistem yg. Modern menyebab")


 f 1(x 1, x 2, …, xn; u 1, u 2, …,")
/U(s) = G(s). x = Ax")




 dari rangkaian RLC. . R. 1 1")




/H")
 =")

 F(s) Gelombang Au(t) A/s Fs. Ramp.")
 R(s) 1 = Ts")

 C(s) = Invers Laplace : 1 Ts + 1 1")
 Potensio K Motor DC Roda gigi")
![E(s) = Ko [R(s) - C(s)] G(s) = Ko. K 1 K 2 n](https://slidetodoc.com/presentation_image/0935f23535d244aa083f1e4c30cf6e4a/image-82.jpg "E(s) = Ko [R(s) - C(s)] G(s) = Ko. K 1 K 2 n")
/R(s) = K Js 2 + Bs + K")

")


 ess = lim s = s 1")




 = bo disubstitusi dalam pers. : x(t) = bo + b 1")




 • y(t) = Kp e(t) + y(0)")
 C R 1")
 R 2 • R 1 e(t) C R e(t) y(t)")
 R y(t) e(t) y(t) =")
 R 2 • R 1 e(t) CD R e(t) y(t)")
 CD R e(t)")



 Ps Pemasok udara")

 masukan a Nosel Lubang pori Ke")

 Nosel")
 a Nosel Pc R C Ke")
 a Nosel R R C C")
/R(s) = B(s)/A(s) Stabilitas")



/a 1 B 2=(a 1 xa")
/R(s) = K/(s(s 2+s+1)(s+2)+K) Pers. Karakteristik")
 • Respon Transien sistem loop tertutup berhubungan dengan")

/R(s) = G(s) 1")
H(s) = -1 • Titik-titik dalam suatu diagram yg.")
- Slides: 123
KONSEP DASAR SISTEM PENGATURAN Sistem Pengaturan adalah Suatu sistem dengan acuan masukan yang dikehendaki dapat konstan atau berubah perlahan dengan berjalannya waktu untuk menjaga keluaran sebenarnya berada pada nilai yang diinginkan
Konsep Sistem • Elemen-elemen • Interaksi • Tujuan
Proses Belajar Mengajar
Komponen Sistem Pengaturan : Masukan : Tujuan yg. di capai dlm sistem pengaturan. Komponen : Bagian dari sistem pengaturan yang saling berinteraksi. Proses : Operasi yang dikontrol Keluaran : keadaan sebenarnya Blok Diagram Sistem Pengaturan Gangguan Input Kontroler Aktuator Sensor output Plant
Contoh : Saklar Listrik Saklar AC 220 V Diagram Blok Saklar Listrik Saklar Lampu
Sistem Pengaturan Level Air Kontroler (h) Air Diagram Blok Sistem Level Air h yg. diinginkan Kontroler Kran air Pelampung Bak Air h’ terukur
Aplikasi SP di Industri 1. SP. Gaya Pegangan Tangan Robot Mikro komputer Motor Steper Titik pengatur Gaya pegangan 2. SP. Suhu Ruang Penumpang Mobil matahari jml. penumpang Sensor panas radiasi Suhu ruang diinginkan Kontroler Pengatur Udaya Sensor Ruang penumpang terukur
Klasifikasi Sistem Kontrol : 1. Sistem Pengaturan Motor Servo (Servomekanis) adalah : Sistem Pengaturan berumpan balik yang keluarannya berupa kecepatan, percepatan, dan posisi mekanik 2. Sistem Pengaturan Proses : Sistem regular automatik dengan keluaran seperti temperatur, tekanan, aliran, tinggi muka cairan
Penggolongan Sistem Pengaturan • Sistem Lintasan Terbuka : Suatu sistem yang tindakan pengendaliannya bebas dari keluarannya. • Sistem Lintasan Tertutup : Suatu sistem yang tindakan pengendaliannya tergantung pada keluarannya.
Perbandingan sistem lintasan terbuka dengan sistem lintasan tertutup • Pada sistem lintasan terbuka : - tidak dapat melaksanakan tugas seperti yang diharapkan - hubungan masukan dan keluaran sudah diketahui. - tidak terdapat gangguan internal maupun eksternal - kurang peka terhadap gangguan - komponen-komponen yang dipakai relatif lebih murah - kestabilan lebih mudah dibuat
• Pada lintasan tertutup : - relatif lebih peka terhadap gangguan - komponen-komponen yang digunakan relatif lebih mahal - Kestabilan merupakan persoalan utama - kecenderungan terjadi kesalahan akibat koreksi yang berlebih dapat menimbulkan osilasi pada amplitudo tetap maupun berubah
Tugas Diskusi SP. Intensitas Ruangan Lampu AC 220 V Foto Sel apakah sistem tersebut tergolong dalam sistem lintasan terbuka atau tertutup ? jelaskan
Konsep Sistem Proses Belajar Mengajar • Elemen-elemen • Interaksi • Tujuan
TRANSFORMASI LAPLACE q. Overview q. Definisi q. Teorema transformasi Laplace q. Ekspansi pecahan parsial: Review q. Pecahan parsial menggunakan Mat. Lab
Overview • Persamaan Differensial yang diperoleh dari pemodelan matematik suatu sistem mewakili proses dinamik dari sistem tersebut dimana responsenya akan bergantung pada masukannya • Solusi dari persamaan differensial terdiri dari solusi steady state (didapat jika semua kondisi awal nol) dan solusi transien (mewakili pengaruh dari kondisi awal). • Transformasi Laplace merupakan salah satu tools yang digunakan untuk menyelesaikan persamaan differensial.
Overview • Transformasi Laplace mengkonversikan persamaan differensial (dalam domain t) kedalam persamaan aljabar dalam domain s. • Memungkinkan memanipulasi persamaan aljabar dengan aturan sederhana untuk menghasilkan solusi dalam domain s. • Solusi dalam domain t dapat diperoleh dengan melakukan operasi inverse transformasi Laplace
DEFINISI F (s) = f(t) e-st dt 0 F(s) = fungsi laplace f(t) = fungsi waktu = simbol laplace Transformasi Laplace f(t) ada : Jika : f (t) sepotong-sepotong kontinyu utk. t > 0 mempunyai Orde eksponensial dgn. Membesarnya t menuju tak berhingga LAPLACE BALIK -1 [F(s)] = f(t)
Tabel Transformasi Laplace
Sifat-sifat Transformasi Laplace
Penyelesaian Linear PD : Bila syarat awal nol maka : TL. d/dt = S TL d 2/dt 2 = S 2 Langkah penyelesaian PD : • TL. Tiap suku PD • Substitusi syarat awal • Cari penyelesaian waktu dg. Invers Laplace
Contoh: Solusi Persamaan Differensial Diberikan persamaan differensial sbb: Dimana f(t) adalah fungsi unit step dengan kondisi awal y(0)=-1 dan y´(0)=2. Transformasi Laplace menghasilkan: Fungsi unit step dari tabel transformasi Laplace Menggunakan teorema differensiasi transformasi Laplace Solusi dalam domain t diperoleh dengan invers transformasi Laplace
Invers transformasi Laplace dilakukan dengan memanipulasi penyebut (denumerator) dalam fungsi Y(s) kedalam akar-akarnya: Ekpansi dalam pecahan parsial, Dimana A, B dan C adalah koefisien
Persamaan Y(s) dalam bentuk pecahan parsial menjadi Dengan invers transformasi Laplace (di dapat dari tabel), persamaan dalam domain waktu y(t) menjadi Dengan t≥ 0
Prosedur Solusi pers. Differensial dengan: Transformasi Laplace 1. Transformasi persamaan differensial ke dalam domain s dengan transformasi Laplace menggunakan tabel transformasi Laplace. 2. Manipulasi persamaan aljabar yang telah ditransformasikan untuk mendapatkan variabel outputnya. 3. Lakukan ekspansi pecahan parsial terhadap persamaan aljabar pada langkah 2. 4. Lakukan invers transformasi Laplace dengan tabel transformasi Laplace untuk mendapatkan solusi dalam domain t.
Ekspansi Pecahan Parsial: Review • Transformasi Laplace dari suatu persamaan differensial f(t) lazimnya diberikan dalam bentuk: N(s) adalah numerator (pembilang) dalam s, D(s) denumerator (penyebut) dalam s • Bentuk ekspansi pecahan parsial dari F(s) bergantung pada akar-akar persamaan karakteristiknya (denumerator). – Kasus 1: Persamaan karakteristik hanya memiliki akar real dan tidak sama Dalam kasus tersebut pecahan parsialnya dapat dituliskan dalam bentuk: Ki (i=1, …, N) adalah konstanta yang harus dicari
Ekspansi Pecahan Parsial: Review Konstanta K dicari dengan persamaan berikut: • Kasus 2: Persamaan karakteristik hanya memiliki akar kompleks Jika persamaan karakteristik hanya memiliki M pasangan complex-conjugate, F(s) dapat dituliskan sbb: Dalam kasus tersebut pecahan parsialnya dapat dituliskan dalam bentuk: Dimana Ai dan Bi konstanta yang dicari dengan menyamakan pangkat dalam s
Ekspansi Pecahan Parsial: Review Persamaan karakteristik memiliki akar real, tidak sama dan kompleks Dalam kasus tersebut pecahan parsialnya dapat dituliskan dalam bentuk:
Ekspansi Pecahan Parsial: Review Kasus 3 : Persamaan karakteristik memiliki akar real yang sama Dalam kasus tersebut pecahan parsialnya dapat dituliskan dalam bentuk:
Ekspansi Pecahan Parsial: dengan software Mat. Lab • Fungsi transfer, F(s)=N(s)/D(s): • Dalam Mat. Lab numerator (pembilang), num dan denumerator (penyebut), den dituliskan dalam bentuk vektor baris yang dinyatakan dengan koefisiennya • Perintah >>[r, p, k]=residue(num , den) • Ekspansi pecahan parsialnya adalah Perintah ini akan mencari residu, poles dan direct term dari ekspansi pecahan parsial N(s)/D(s) k(s) adalah direct term
Contoh • Dengan menggunakan Mat. Lab, tentukan ekspansi pecahan parsial dari fungsi transfer berikut: r= Solusi dengan Mat. Lab: >>num=[1 2 3]; >>den=[1 3 3 1]; >>[r, p, k]=residue(num, den) Ekspansi pecahan parsialnya: 1. 0000 0. 0000 2. 0000 p= -1. 0000 k= []
Latihan : 1. Bila f(t) merup. Fs. Tak lenear apakah f(t) bisa ditransformasi laplacekan ? 2. Tentukan PD. Dari : . . . X(t) + 3 X(t) + 2 X = 0
• Transfer Function (Fungsi Alih) adalah : =G(s)= [output]/ [input]t(0)=0 Komentar Fungsi Alih : - TL. Terbatas PD linear time invariant - TL. merup. sifat dari sistem - TL. Tidak memberikan informasi mengenai sistem fisik - Jk. TF. Diketahui keluaran bisa ditelaah dg. bermacam bentuk masukan - Jk. TF. Tidak diketahui keluaran diperoleh dgn. dilakukan Percobaan dgn. Input diketahui.
• Langkah Penurunan Transfer Function • 1. Tulis PD dari sistem • 2. TL. dari PD syarat awal = 0 • 3. Rasio keluaran dan masukan merupakan transfer function
MODEL MATEMATIKA SISTEM DINAMIK • Merup. Pers. Dinamik sistem • Sistem meliputi mekanik, listrik, thermal
MODEL MATEMATIKA • Langkah awal dalam analisis sistem dinamik menurunkan model matematikanya • Model merupakan bentuk pers. Matematika yg. menggambarkan dinamika sistem • Model matematika mengambil banyak bentuk yg bebeda mis. : TF. utk. Sistem SISO State Space utk. Sistem MIMO • Kesederhanaan model dengan ketepatan hasil • Sistem linear time invariant (superposisi)
DIAGRAM BLOK q Overview q Diagram Blok Ø Sistem Tertutup Ideal Ø Sistem Tertutup dengan gangguan q Aljabar Diagram Blok Ø Seri Ø Paralel Ø Feedback q Contoh
Overview Fungsi Transfer, U(s) G(s) Y(s) Diagram Blok suatu sistem q Hubungan antara output dan input suatu sistem dapat digambarkan dengan suatu blok (=diagram blok) yang mengandung fungsi transfer. q Diagram Blok merupakan Penyajian bergambar dari fungsi dan aliran sinyalnya q Sistem terdiri dari banyak komponen q TF. Dari sistem ditulis dalam blok yg. Disederhanakan q Dengan representasi diagram blok, keserupaan (similarity) berbagai tipe sistem kontrol dapat dipelajari.
Diagram Blok sistem tertutup: Ideal Titik Penjumlahan R(s) + - Titik Percabangan E(s) Y(s) G(s) B(s) H(s) R(s)=Referensi sinyal input E(s)=Sinyal error [E(s)=R(s)-B(s)] G(s), H(s)=Fungsi Transfer B(s)= Sinyal feedback Y(s)=Sinyal output
Feed-forward Transfer Function, FFTF Open-Loop Transfer Function, OLTF Hubungan Input Output (Liha Diagram Blok): Y(s)=G(s)E(s)=R(s)-B(s)=H(s)Y(s) Atau Y(s)=G(s)[R(s)-H(s)Y(s)] Y(s)+G(s)H(s)Y(s)=G(s)R(s) (1+G(s)H(s))Y(s)= G(s)R(s) Atau, Closed-Loop Transfer Function, CLTF
Diagram Blok sistem tertutup dengan gangguan D(s) R(s) + - E(s) G 1(s) U 1(s)+ U 2(s) + G 2(s) Y(s) B(s) H(s) Jika dalam suatu sistem terdapat dua input (reference input dan gangguan), maka tiap input dapat diperlakukan independen, output yang berkorespondensi pada tiap input dapat dijumlahkan untuk menentukan output sistem keseluruhan.
Response Y(s) terhadap gangguan D(s), Response Y(s) terhadap referensi input R(s), dengan measumsikan gangguan sama degan nol Total Response Y(s),
Diagram Blok: Seri R(s) Y(s) G 1(s) G 2(s) Gk(s) G(s) Fungsi Transfer
Paralel G 1(s) R(s) G 2(s) + + + Gk(s) Fungsi Transfer hubungan paralel: Y(s) G(s)
Feedback R(s) G 1(s) + Y(s) - + G 2(s) Fungsi Transfer G(s)
Simplikasi Diagram Blok R Y G R + Y G + - - + + B Y R R G + Y G - + + B B 1/G B G
R Y G G Y B G Y R R G Y G R R 1/G
R Y G R Y H + G/H + - - + + B H Y R G + - R Y 1/H GH + - + + H
Contoh 1 Diagram blok dari suatu sistem diberikan seperti gambar berikut, Tentukan: a). Open-Loop Transfer Function, OLTF b). Closed-Loop Transfer Function, CLTF R + - B E C U Y G H Jawab a). Open-Loop Transfer Function, OLTF b). Closed-Loop Transfer Function, CLTF
REDUKSI DIAGRAM BLOK Tujuan : Utk. mendapatkan TF dari diagram blok sistem Syarat reduksi diagram blok: Reduksi diagram dimulai dari lintasan tertutup yg. paling kecil atau tanpa dipengaruhi oleh percabangan dan summing point Bila terjadi perubahan susunan diagram blok : • Hasil fungsi alih dalam arah umpan maju harus tetap sama • Hasil fungsi alih sekitar loop harus tetap sama
Aturan Aljabar dalam reduksi diagram blok • Menukarkan dua summing point tidak mempengaruhi hasil • Menukarkan dua percabangan tidak mempengaruhi hasil • Hindari menukarkan summning point dan percabangan • Lihat Tabel pada buku teks
Contoh 2 Sederhanakan diagram blok berikut: C 1 R + - + + C 2 - Y G 1 H 3 H 2 G 2
Contoh 2 Jawab C 1 R + - + + C 2 - Y G 1 H 3 H 2 G 2
Contoh 2 Jawab R + - C 1+C 2 G 1 1+G 1 H 1 Y G 2 H 2 H 3 R + - (C 1+C 2)G 1 G 2 1+G 1 H 1 H 2 H 3 Y
Contoh 2 Diagram Blok yang disederhanakan menjadi: R (C 1+C 2)G 1 G 2 1+G 1[H 1+(C 1+C 2) G 2 H 2 H 3] Y
Model Grafik Aliran Sinyal • Penyajian dinamika sistem • Memberikan informasi yang sama dengan diagram blok Langkah analisis • Transformasi PD linear dlm. Pers. Aljabar bid. S Gambar grafik aliran sinyal Simpul masukan X 4 X 1 a Simpul masukan Simpul campuran X 2 c b X 3 1 Simpul keluaran X 3
Komponen grafik aliran sinyal • Simpul : titik penyajian variabel • Transmitan : penguatan antara dua simpul • Cabang : garis yg. menghub. kan dua simpul • lintasan : jalan yang menghub. Cabang dalam anak panah
Aljabar grafik aliran sinyal • Transmitan total cabang = perkalian masing - masing transmitan cabang • Cabang paralel digabung dgn. Menambah transmitan Rumus Penguatan Mason 1 P = D Sk Pk Dk Pk = transmitan umpan maju D = 1 - SLa + SLb. Lc - SLd. Le. Lf +. . . SLa = jml. Semua loop
S Lb. Lc = jml. Hasil kali kombinasi dua loop yg. tak bersentuhan S Ld. Le. Lf = jml. Hasil kali kombinasi tiga loop yg. tak bersentuhan Dk = determinan grafik dgn. Menghilang kan loop yang menyentuh lintasan umpan maju ke k Latihan Soal : H 2 G 1 G 2 H 1 G 3
Pendekatan Ruang Keadaan (State Space) thd. Analisis Sistem Kontrol • Sistem yg. Modern menyebab kan tugas semakin rumit dan ketepatan yg. Baik. • Sistem kontrol tidak lagi bersifat SISO akan tetapi MIMO • Pendekatan daerah waktu (time domain) bukan frequency domain
Definisi komponen State space • State/keadaan adl. Sekelompok variabel terkecil • Variabel Keadaan adl. Variabel terkecil menentukan keadaan sistem dinamik • Vektor keadaan adl. n variabel keadaan yg. Menggambarkan dinamika sistem • Ruang Keadaan adl. Ruang berdimensi n sumbu koordinat x 1, x 2, …
• Persamaan Ruang Keadaan adl. Analisis ruang keadaan yang memperlihatkan 3 jenis variabel ( V. masukan, V. keluaran, V. Keadaan) • Model Pers. Ruang Keadaan : u(t) Pers. Sistem : Sistem y(t) . x (t) = f (x , x , …, x ; u , u , …, u ; t). . . 1 1 1 2 n 1 2 r 2 2 1 2 n 1 2 r xn(t) = fn(x 1, x 2, …, xn; u 1, u 2, …, ur; t) Keluaran : y 1(t) = g 1(x 1, x 2, …, xn; u 1, u 2, …, ur; t) y 2(t) = g 2(x 1, x 2, …, xn; u 1, u 2, …, ur ; t) . . . ym(t) = gm(x 1, x 2, …, xn; u 1, u 2, …, ur ; t)
x 1(t) f 1(x 1, x 2, …, xn; u 1, u 2, …, ur ; t) x(t) = x 2(t) , f(x, u, t)= f 2(x 1, x 2, …, xn; u 1, u 2, …, ur ; t) xn(t) fn(x 1, x 2, …, xn; u 1, u 2, …, ur; t) x 1(t) g 1(x 1, x 2, …, xn; u 1, u 2, …, ur ; t) y(t) = x 2(t) , g(x, u, t)= g 2(x 1, x 2, …, xn; u 1, u 2, …ur ; t) xn(t) gn(x 1, x 2, …, xn; u 1, u 2, …, ur; t) Dari pers. Diatas ditulis menjadi . x(t) = f(x, u, t) y(t) = g(x, y, t)
• Hubungan fungsi alih dan ruang keadaan Y(s)/U(s) = G(s). x = Ax + Bu y = Cx + Du x = vektor keadaan, u = masukan s. X(s) - x(0) = AX(s) + BU(s) Y(s) = CX(s) + DU(s) Bila x(0) = 0 mk : s. X(s) = AX(s) + BU(s) (s. I - A)X(s) = BU(s) X(s) = (s. I - A)-1 BU(s) Y(s) = [C(s. I - A)-1 B +D]U(s) G(s) = C(s. I - A)-1 B + D
Model Matematika Sistem Mekanik • Hukum Dasar : Hukum Newton • Sistem Translasi Mekanik : Dashpot, Massa, Pegas • Dashpot : f( t) : Berfungsi sbg. y b Redaman ~~~ ~oli : f(t) = b (dy/dt) Massa • f(t) y m : f(t)= md 2 y/dt 2 • Pegas f(t) y f(t) = Ky
Model sistem Dashpot, massa, pegas • b y m K F • F = m. a • m. d 2 y /dt 2 = F- Ky - bdy/dt • F = md 2 y /dt 2 + Ky + bdy/dt = y(m. D 2 + b. D + K) laplace y(0) = 0 = y (m. S 2 + b. S + K) TF = y/F= 1/(m. S 2 + b. S + K)
Sistem Rotasi Mekanik J T • • w b Hukum Newton : Ja = ST Model sistem rotasi : . . Jw = -bw + T Jw + bw = T J = Momen Inersia w = Kecepatan sudut T = Torsi b = Koefisien gesekan
Sistem Listrik • Hukum Dasar : H. Kirchoff • Contoh Rangkaian RLC L R i C • Ldi/dt + Ri + 1/C i dt = ei • 1/C i dt = eo • T. Laplace dg. I(0) = 0 Ls. I(s) + RI(s) + 1/Cs I(s) dt = Ei(s) 1/Cs I(s) dt = Eo(s) = 1 Ei(s) LCS 2 + RCs + 1
• Gambaran Ruang Keadaan (state space) dari rangkaian RLC. . R. 1 1 • eo + C eo + LC eo = LC ei • Variabel Keadaan : . • x 1 = eo dan x 2 = eo • Variabel masukan dan keluan : • u = ei dan y = eo = x 1 Persamaan ruang keadaan : X 1 X 2 0 1 -1/LC -R/C X 1 1 X 2 1/LC U
• Keluaran : • y= 1 0 X 1 X 2 • Diskusi : i 1 C 2
Sistem Elektronika Model Servomotor DC Ra La i T J Model Matematika : T = KIa eb = K dq/dt La di/dt + Ra. Ia +eb = ea
Torsi Beban J d 2 q/dt 2 + b dq/dt = T = Kia Laplace fungsi syarat awal nol : Kbs. Q(s) = Eb(s) (Las + Rb)Ia(s) + Eb(s) = Ea(s) (Js 2 +bs)Qs = T(s) = KIa(s) k Qs = ea(s) S(L Js 2 + (L b + R J)s + R b +KK ) a a b
Sistem Thermal pemanas Pencampur Air dingin • • • ho = Gcq C = Mc R = q/ho = 1/Gc Pers. Differensial : Cdq/dt = h 1 - ho Air panas
• RC dq/dt + q = Rh 1 fungsi alih : • Q(s)/H 1(s) = R/(RCs + 1) Diagram Blok : + R + - 1/RCs
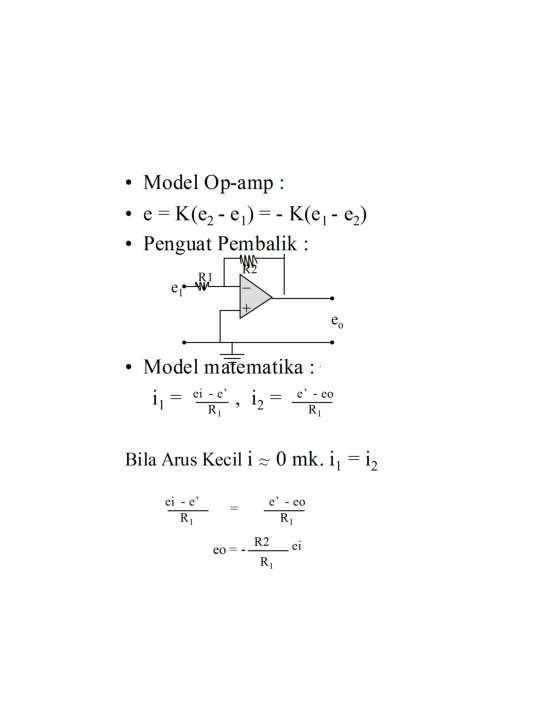
• Model Op-amp : • e = K(e 2 - e 1) = - K(e 1 - e 2) • Penguat Pembalik : e 1 R 2 R 1 + eo • Model matematika : i 1 = ei R- e’ , i 2 = e’R- eo 1 1 Bila Arus Kecil i ~ ~ 0 mk. i 1 = i 2 ei - e’ R 1 = eo = - e’ - eo R 1 R 2 R 1 ei
ANALISIS RESPON TRANSIEN • Performance Sistem • Sinyal Uji • Kestabilan relatif • Kestabilan mutlak • Kesalahan Keadaan Tunak
Bentuk Sinyal Uji Sinyal uji Fs. Tangga f(t) F(s) Gelombang Au(t) A/s Fs. Ramp. Atu(t) A/s 2 Fs. Impuls d(t) 1 Parabolik 1/2 At 2 u(t) A/S 3 A t t
Sistem Orde Satu • Bentuk sistem orde satu : C(s) R(s) 1 = Ts + 1 • Respon tangga satuan C(s) = = 1 s 1 1 Ts + 1 s - T Ts + 1 c(t) = 1 - e-t/T
1 0. 632 T • • • 2 T T = Konstanta waktu Pd. t = T c(T) = 1 - e-1 = 0, 632 = 63, 2% c(2 T) = 1 - e-2 = 0, 865 = 86, 5% Kestabilan diperoleh setelah 4 kali tetapan waktu • T semakin besar waktu mencapai kestabilan lebih cepat
Respon fungsi Ramp (Tanjakan) C(s) = Invers Laplace : 1 Ts + 1 1 s 2 c(t) = 1 - T + Te-t/T Kesalahan Keadaan tunak T r (t) C (t) Kesalahan = e(t) = r(t) - c(t) = T (1 - e-t/T) e(~) = T T semakin kecil Kesalahan semakin kecil
Sistem Orde Dua • Sistem Servo (Pengaturan posisi) Potensio K Motor DC Roda gigi Beban Penurunan Model Matematika : • T = K 2 ia • La dia/dt + Raia + K 3 dq/dt = K 1 e • Jo d 2 q/dt 2 +bo dq/dt = T =K 2 Ia • Q(s)/E(s) = K 1 K 2 s(Las+Ra)(Jos + bo)+K 2 K 3 s • C(s) = n Q(s)
E(s) = Ko [R(s) - C(s)] G(s) = Ko. K 1 K 2 n S[(Las+Ra)(Jos + bo)+K 2 K 3] La = kecil G(s) = Ko. K 1 K 2 n S [Ra (Jos + bo)+K 2 K 3] Pers. Disederhanakan : G(s) = K Js 2 + Bs
Respon Tangga Sistem Orde Dua C(s)/R(s) = K Js 2 + Bs + K Bila : K/J = wn 2, B/J = 2 zwn =2 s wn 2 C(s)/R(s) = s 2 + 2 zwn s+ wn 2 wn = Redaman alamiah tak teredaman z = faktor redaman
Pengaruh z terhadap respon sistem bila input merup. Fs Step 1. Keadaan Teredam (0 < z <1) 2. Keadaan Redaman Kritis (z = 1) 3. Keadaan Redaman Lebih (z >1) 4. Keadaan osilasi (z = <1) Gambar : z<1 z=0, 7 c(t) z=1
Penggolongan tanggapan Transien thd. Masukan tangga satuan 1. Waktu tunda td (setengah nilai akhir) 2. Waktu naik tr (10% -90%) 3. Waktu puncak tp (puncak pertama overshoot) 4. Overshoot maks. Mp (c(tp)-c(~))100% 5. Waktu turun ts (toleransi 2% -5%) Gambar : mp tp td tp ts
Analisis Kesalahan Keadaan Tunak • Kesalahan keadaan tunak terjadi pada input fungsi tanjakan • Kesalahan terjadi tergantung pada jenis fungsi alih loop terbuka Penggolongan Sistem Kontrol : Fs. Loop terbuka G(s)H(s) = K(Tas+1)(Tbs+1)…(Tms+1) s. N(Tas+1)(Tbs+1)…(Tms+1)
• N = jenis sistem • Bila N=0, 1, …Sistem jenis 0, 1… Kesalahan Keadaan Tunak : C(s)/R(s) = G(s)/ (1 + G(s)H(s)) TF. E(s)/R(s) = 1 -(G(s)H(s)/R(s)) = 1/ (1+G(s)H(s)) • E(s) = 1 1 + G(s)H(s) R(s) • ess = lim e(t) =lim s. E(s) t ~ s 0
Tetapan kesalahan posisi statis Kp (input step) ess = lim s = s 1 0 1 + G(s)H(s) s 1 1 + G(0)H(0) Kp = G(0)H(0) ess = 1/ (1 + Kp) tipe 0 : K(Tas+1)(Tbs+1). . . Kp = lim N =K s tipe 1: Kp = 0 s (T 1 s+1)(T 2 s+1). . .
Jadi : ess = 1/1+K tipe 0 ess = 0 tipe 1 atau lebih Tetapan kesalahan kecepatan statis Kv s 1 ess =lim s 0 1 + G(s)H(s) s 2 s ess =lim s G(s)H(s) s 0 ess = 1/Kv tipe 0 = Kv = 0 tipe 1 = Kv = K tipe 2 & > = Kv =
Tetapan Kesalahan masukan tanjakan : ess = 1/Kv = tipe 0 ess = 1/Kv = 1/K tipe 1 ess = 1/Kv = 0 tipe 2&> Tabel kesalahan tunak dlm Penguatan K input step • tipe 0 1/1+K • tipe 1 0 • tipe 2 0 input tanjakan input percepatan 1/K 0 1/K
Pendahuluan Optimasi Sistem • Meminimumkan kesalahan indeks kinerja. • Dalam desain sistem kontrol yang terpenting adalah spesifikasi kinerja sistem • Indeks Kinerja : Bilangan yg. Menunjukkan tk. Kebaikan kinerja sistem Nilai optimal parameter tgt. Indek kinerja
Penyelesaian Persamaan Keadaan Waktu Keadaan Homogen : PD. Skalar : . x = ax a = skalar x(t) = bo + b 1 t + b 2 t 2+…+bktk +… Substitusi ke pers. Diatas : b 1 + b 2 t +…+bktk +…= a(bo + b 1 t + b 2 t 2+…+bktk +…) Pers. Koefisien : b 1 = abo b 2 = 1/2 ab 1 = 1/2 a 2 bo b 3 = 1/3 ab 2 = 1/(3 x 2) a 3 bo : bk = 1/k! akbo
Bila x(0) = bo disubstitusi dalam pers. : x(t) = bo + b 1 t + b 2 t 2+…+bktk +… maka: x(t) = (1 + at + 1/2! a 2 t 2+…+ 1/k! attk + … ) x(0) = eat x(0) Penyelesaian PD matrik vektor. x = Ax , A = matrik vektor x = matrik n x n Analogi dlm status skalar : x(t) = bo + b 1 t + b 2 t 2+…+bktk +… Substitusi PD vektor :
Subtitusi : b 1 + 2 b 2 t+…+kbktk+… = A(bo + b 1 t + … + kbktk +… Menyamakan Koefisen pers. Kiri dan kanan : b 1 = Abo b 2 = 1/2 Ab 1 = 1/2 A 2 bo b 3 = 1/3 Ab 2 = 1/(3 x 2) A 3 bo : bk = 1/k! Akbo substitusi t = 0 x(0) = bo x(t) = [I + At + 1/2! A 2 t 2 +…+1/k! Aktk + …]x(0)
I + At + 1/2! A 2 t 2 +…+1/k! Aktk + …= e. At Penyelesaian Persamaan : x(t) = e. At x(0)
Aksi Kontrol Dasar • Kontroler mengasilkan sinyal kontrol : aksi kontrol • Kontroler Analog di Industri : 1. Kontroler Posisi (on-off) 2. Kontroler Proporsional (P) 3. Kontroler Diferensiator (D) 4. Kontroler Integral (I) 5. Proporsional Diferensiator (PD) 6. Proporsional Integrator (PI) 7. Proporsional Integrator Differensial (PID)
Kontoler Dua posisi Air 15 V • Kontrol Level Air E Kontroler Celah diferensial • u(t) = U ; e(t) > 0 = 0 ; e(t) < 0
Kontroler Proporsional (Keluaran berbanding langsung dg. Masukan) • y(t) = Kp e(t) + y(0) • Rangkaian Op-Amp R 2 R 1 e(t) R y(t) • Kp = R 2/R 1 • y(t) = (R 2/R 1) e(t) + y(0) e(t) y(t) Kp
Kontroler Integrator (Laju Perubahan Keluaran tgt. Pd. Kontanta Waktu Integrasi, Ti) C R 1 e(t) y(t) R e(t) A dy/dt = 1/(R 1 C 1) y(t) B dy/dt = laju perubahan keluaran R 1 C 1 = Ti = 1/Ki Kelemahan : Reaksi kontrol lambat
Kontroler Diferensiator (Laju kontrol) R 2 • R 1 e(t) C R e(t) y(t) = R 2 CD de(t)/dt + y(0) y(t) = TD de(t)/dt + y(0) de(t)/dt = laju perubahan t y(t) sinyal TD = Konstanta waktu Ri. Co t derivatif Kelemahan : efektif selama transien
Kontroler Proporsional Integrator R 2 C R 1 e(t) R y(t) e(t) y(t) = R 2/R 1 e(t) + 1/R 1 C 1 e(t)d(t) + y(0) P y(t) = Kp e(t) + 1/Ti e(t)d(t) + y(0) y(t) Kp = R 2/R 1 I P Ti Ti = R 1 Ci waktu integrasi
Kontroler Proporsional Differensiator (PD) R 2 • R 1 e(t) CD R e(t) y(t) = R 2/R 1 e(t) + R 2 CD de(t)/d(t) + y(0) P y(t) = Kp e(t) + TD t de(t)/d(t) + y(0) y(t) Kp = R 2/R 1 TD = waktu derivatif P Td t
Kontroler Proporsional Integrator & Differensiator R 2 Ci R 1 e(t) CD R e(t) y(t) = [R 2/R 1+CD/Ci] e(t) + R 2 C 2 de(t)/d(t) + 1/R 1 C 1 P e(t)d(t) + y(0) t y(t) = Kpe(t) + R 2 C 2 y(t) de(t)/d(t) + 1/Ti e(t)d(t) + y(0) P Td t
Sistem Pneumatika Sistem dgn. Mengubah energi udara yang dimanpatkan menjadi energi mekanik • Kelebihan : sifatnya yang tahan ledakan, kesederhanaan, dan perawatan mudah
Diagram Skematik Sistem Tekanan Resistansi R p + po r+ro Kapasitansi DP Kemiringan d (DP) dq q R= • R= Perubahan beda tekanan Perubahan Laju aliran gas d (DP) dq
Perubahan Persediaan gas R= Perubahan tekanan gas C = V dr/dp Sistem Tekanan : Untuk nilai pi - po kecil maka : R = (pi - po)/q C = V dr/dp C dpo = q dt C dpo/dt = (pi - po)/ R RC dpo/dt + po =pi Po/Pi = 1/(RCs + 1)
• Penguat Nosel - Pengelepak Pb Lubang pori masukan X(t) Ps Pemasok udara Nosel Ke katub pengukur Pb Ps Pc t Kurva karakteristik
• Relay Peneumatik Tekanan Balik Nosel Ke atmosfer Ke katup pneumatik Pc Pemasok Udara (Ps)
• Kontroler Proporsional Pneumatik e Pb X(t) masukan a Nosel Lubang pori Ke katub pengukur Pc Ps Katub b
• • Penurunan Model Matematika Pb = K 1 x Pb = K 2 Z Pc = K 3 Z • Pc = K 3/K 2 Pb = Kx • x = b/(a+b) e - a/(a+b) y • Apc = Ks y • Pc(s)/E(s) b/(a+b) K =1 + K (1/(a+b)) A/Ks = Kp
Kontrol Pneumatik P+D e Pb Lubang pori masukan a Pemasok udara Pc X(t) Nosel b R Ke katub pengukur e Pc(s)/E(s)= x b/(a+b) K 1 + Ka/(a+b) A/Ks 1/(RCs+1) Pc
Kontrol Pneumatik P+I Pb Lubang pori e X(t) a Nosel Pc R C Ke katub pengukur e t x t Pc t masukan b
Kontrol Pneumatik P+I+D e Pb Lubang pori X(t) a Nosel R R C C Ke katub pengukur b/(a+b) masukan K 1/(Rd Cs+1) b/(a+b) 1/(Ri. Cs+1) b
ANALISIS KESTABILAN Analisis Stabilitas pd. Bidang Kompleks Pers. TF = C(s)/R(s) = B(s)/A(s) Stabilitas loop tertutup : ditentukan oleh akar-akar persamaan karakteristik (A(s)) disebut Kutub
• Kutub Loop Tertutup berada pada sebelah kiri sumbu Khayal Bid. S jw Daerah stabil s • Stabilitas tidak tergantung pada masukan maupun fungsi pengendalian sistem
Kriteria Kestabilan Routh • Memberikan informasi akar posistif pers. Polinomial • Kestabilan ditentukan dari koefisien • Bila terdapat koef. nol atau negatif adalah akar real positif • Persamaan TF dari : C(s)/R(s) = bosm+ b 1 s m-1+…+bm-1 s+bm aosn + a 1 s n-1+…+ am-1 s+an
Prosedur Kriteria Routh : • Tulis Pers. Polinomial dari Penyebut loop tertutup aosn + a 1 s n-1 +…+ am-1 s +an = 0 • Bila koef. Positif, susun dalam matrik baris dan kolom : Sn ao a 2 a 4 a 6. . . Sn-1 a 3 a 5 a 7. . . Sn-2 b 1 b 2 b 3 b 4. . . Sn-3 c 1 c 2 c 3 c 4. . . • S 1 • S 0
B 1=(a 1 xa 2 -a 0 xa 3)/a 1 B 2=(a 1 xa 4 -a 0 xa 5)/a 1 B 3=(a 1 xa 6 -a 0 xa 7)/a 1 Dst C 1=(b 1 xa 3 -a 1 xb 2)/b 1 C 2=(b 1 xa 5 -a 1 xb 3)/b 1 dst
Penerapan Kriteria Routh dalam Analisis Kestabilan Sistem Kontrol C(s)/R(s) = K/(s(s 2+s+1)(s+2)+K) Pers. Karakteristik : S 4 + 3 S 3 + 3 S 2 + 2 S + K = 0 • S 4 1 3 K • S 3 3 2 0 • S 2 7/3 K • S 1 2 -9/7 K • S 0 K • Hasil 14/9 > K > 0
Analisis Tempat Kedudukan Akar (Root Locus) • Respon Transien sistem loop tertutup berhubungan dengan lokasi kutub loop tertutup. • Kutub-kutub loop tertutup merupakan akar persamaan karakteristik • Persamaan Orde tinggi sulit menentukan akar-akar • Oleh WR Evan ditemukan metode Tempat Kedudukan Akar.
• Metode TKA dapat memprediksi pengaruh loop tertutup bila nilai penguatan bervariasi atau penambahan loop terbuka. • Metode TKA merupakan metode grafis untukmencari akar-akar pers. karakteristik
Diagram Tempat Kedudukan Akar • Syarat sudut dan syarat besaran C(s)/R(s) = G(s) 1 + G(s)H(s) Pers. Akar karakteristik : 1 + G(s)H(s) = 0 G(s) H(s) = -1 Syarat sudut : G(s)H(s) = ± 180 o (2 k+1) k =0, 1, 2, ….
• Syarat Besar : G(s)H(s) = -1 • Titik-titik dalam suatu diagram yg. Memenuhi syarat sudut merupakan Tempat Kedudukan Akar-akar • 1+G(s)H(s) = K(s + Z 1)(s + Z 2)…(s + Zm) 1+ =0 (s + p 1)(s + p 2)…(s + pn) Kedudukan akar-akar merupakan kedudukan kutub-kutub loop tertutup jika K diubah dari nol sampai tak berhingga