The Scalar Kalman filter studentweizhou teacherjohnw Outline recursive






 =")












- Slides: 25
The Scalar Kalman filter student:wei-zhou teacher:johnw
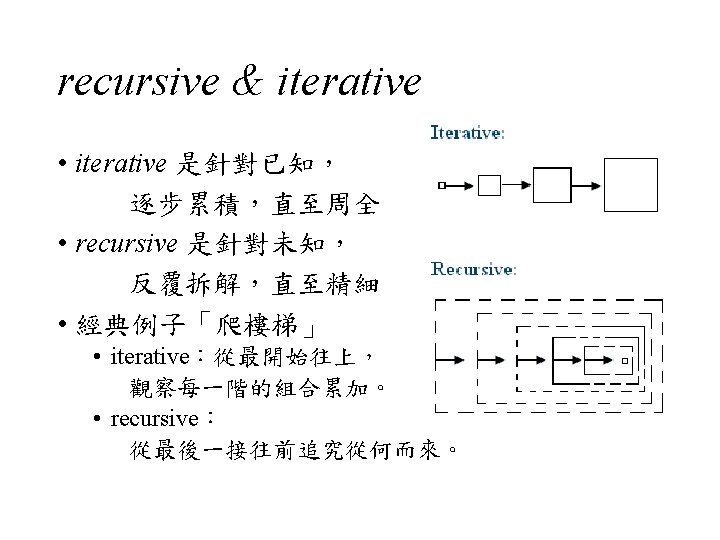
Outline • recursive method • system status & measurement • prediction & correction • finding kalman gain & covariane • formula & example • conclusion
recursive example •
system status •
system status •
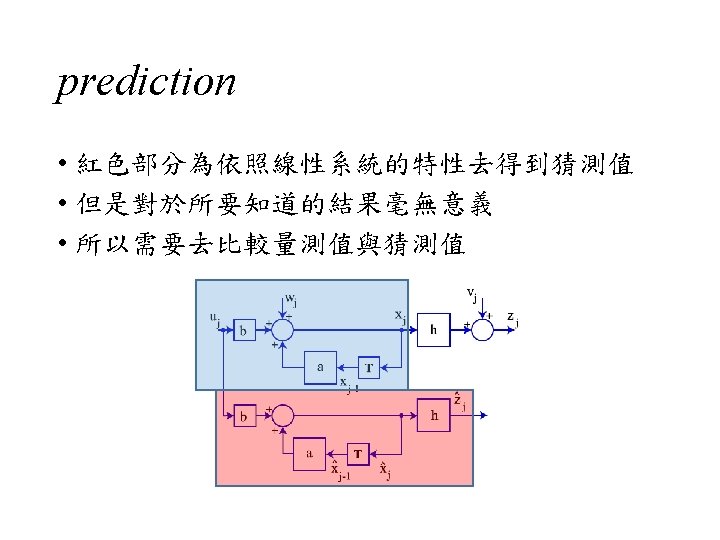
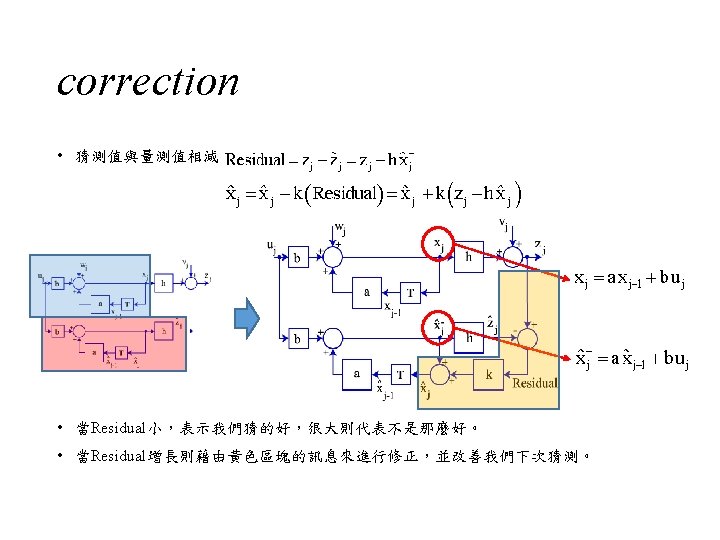
measurement The measured value �� depends on the current value of �� , as determined by the gain ℎ. Additionally, the measurement has its own noise, �� associated with it. The noise, �� is white noise source with zero mean. • h可以說是量測 具的特性,影響得到的量測值。(此假設為常數) • 藍色部分為未知的實際值的部分,因此需要量測判斷。
find kalman gain 核心:計算k值為用來使得估計值趨於完善 define the errors of our estimate 變異數定義 cov(x, x) = var(x)
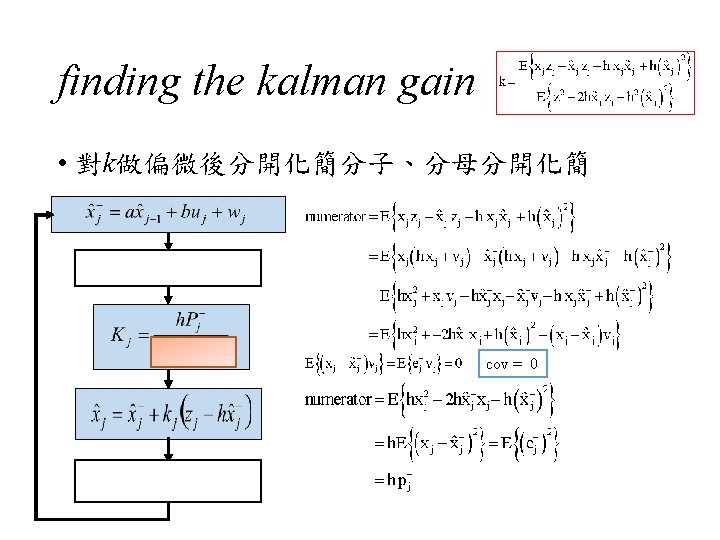
finding the kalman gain • To find the value of k that minimizes the variance we differentiate this expression with respect to k and set the derivative to zero.
finding the kalman gain • 找到k值後開始找covariance
finding the a priori covariance • Finding the a priori covariance is straightforward starting with its definition. cov = 0
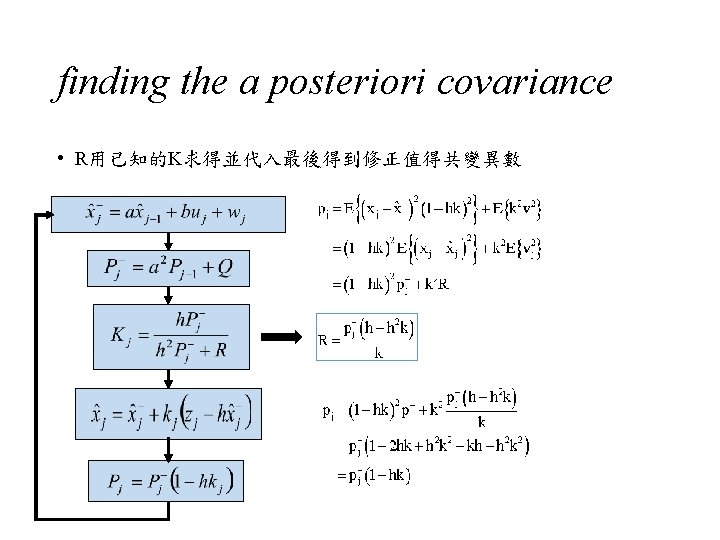
finding the a posteriori covariance • As with the a priori covariance, we find the a posteriori covariance by starting with its definition. cov = 0
formula : step one to step five 1. 預測 j 狀態初值 predictor 2. priori covariance 3. calculate kalman gain 4. 估算 j 時刻最佳狀態值 corrector 5. posteriori covariance
example – sensor 1 •
example – sensor 2 •
example – result
Conclusion If the measurement noise, R is very large, k is again very small, so we disregard the current measurement in forming the new estimate. If the measurement noise is large, then we have low confidence in the measurement and our estimate will depend more upon the previous estimates. (因量測 具很差數值變化很大,所以等於只能靠猜測)
Conclusion If the a priori error is very small, k is correspondingly very small, so our correction is also very small. In other words we will ignore the current measurement and simply use past estimates to form the new estimate. If our first estimate (the a priori estimate) is good (i. e. , with small error) there is very little need to correct it. (因為猜的準誤差很小,所以等於量測數據影響小)
Conclusion If the a priori error is very large then k=1/h. This in effect, tells us to throw away the a priori estimate and use the current (measured) value of the output to estimate the state. If the a priori error is large then we should disregard the a priori estimate, and instead use the current measurement of the output to form our estimate of the state. (因為亂猜得很爛,所以只剩下量測數據影響大)
thanks for your attention