commande optimale critre quadratique et filtrage de kalman
 et filtrage de kalman Joël Le Roux, EPU, Université de")





 le critère est minimum quand")




 Cas élémentaire état initial état final voulu minimiser pénalisation")




- Slides: 18
commande optimale (critère quadratique) et filtrage de kalman Joël Le Roux, EPU, Université de Nice ; leroux@polytech. unice. fr Des équations similaires parce qu’on minimise un critère quadratique D u(t) Commande (entrée) B + C x(t+1) A état x(t) x(t+1)=A. x(t)+B. u(t) z-1 + y(t) sortie (mesure) mémoire (retard) commande optimale : un système est dans un état initial connu ; comment l’amener à un état final donné en un nombre fini d’étapes et en minimisant un critère quadratique Justification fondée sur le principe de Bellman et une écriture récursive de la solution du problème de commande optimale
formalisation du critère 1 Le critère qu’on cherche à minimiser e! r u rit c é l’ z e ot n il fait intervenir les états et les commandes ; les matrices Q et R sont connues et définies positives
formalisation du critère 2 Le critère qu’on cherche à minimiser il fait intervenir les états et les commandes ; les matrices Q et R sont connues et définies positives
formalisation du critère 3 Le critère qu’on cherche à minimiser il fait intervenir les états et les commandes ; les matrices Q et R sont connues et définies positives
formalisation du critère 4 qu’on cherche à mettre sous la forme dans le cas scalaire
formalisation du critère 5 qu’on cherche à mettre sous la forme pour que les expressions soient identiques, il faut que
minimisation du critère 1 Factorisation en racines carrées (triangulaires) le critère est minimum quand le dernier terme est nul
minimisation du critère 2 evaluation du critère quand le minimum est atteint
minimisation du critère 3 evaluation du critère quand le minimum est atteint
minimisation du critère 4 evaluation du critère quand le minimum est atteint
expression finale des calculs de commande optimale Equations correspondantes du filtre de Kalman
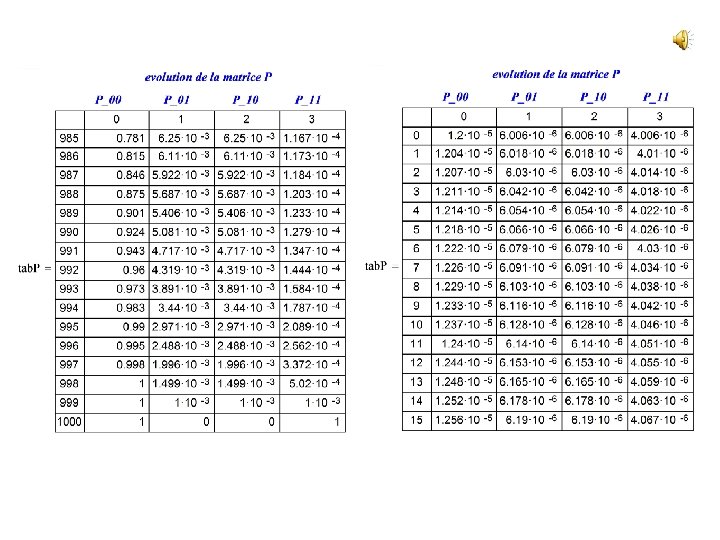
Illustration par une simulation (mathcad) Cas élémentaire état initial état final voulu minimiser pénalisation si l’état final n’est pas
calcul récursif de la matrice P traduit la pénalisation si l’état final n’est pas
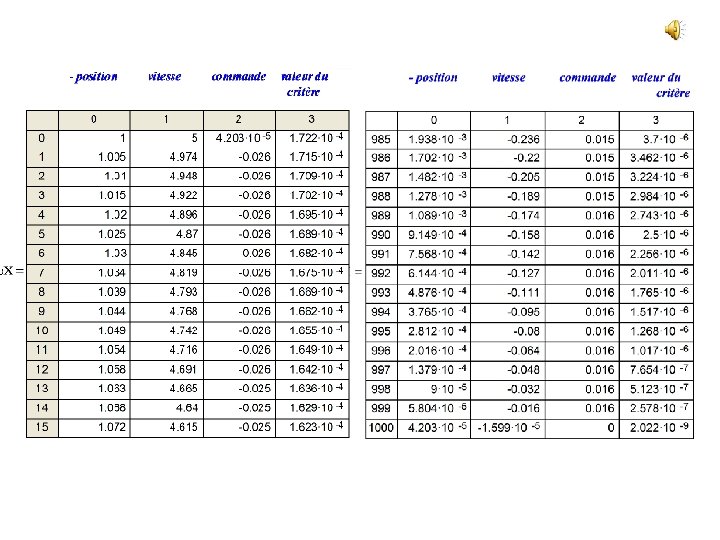
calcul itératif de la commande
évolution de la position et de la vitesse en fonction de la commande
évolution en fonction du temps iteration