Cinemtica del Slido Rgido Versin 07072016 FSICA GENERAL



 k o i P k 1 i 1 j j 1 O")
 k P ¡NO ES UNA ROTACIÓN! i i 1 j O k")

 P O O P")
 d O P O’")


 A v. A B v. B Son iguales")
 A v. A B v. B A v.")
 A(0, y. A) v. A v. B B(x.")


 ze z * z xe y z")
 d /dt z * z d /dt")
 z d /dt p y z 1")





 Máxima")
 Instantáneamente el sólido se traslada")

 Instantáneamente el sólido sólo rota alrededor del E.")




 dx=d R D=2 R vc= R vc")
 R c R")




 t 1=0 O O 1 j")
 = R( t-sen t)")
 x(t) = R( t-sen t) y(t)")
 x(t) = R t- a sen")
 x(t) = R t- a sen")
 z 1 y 1 x 1")
 z 1 B z C A x 1 i O e")





 z p r u 3 z 1 r")
 z p r u 3 z 1 r")
 z p r u 3 z 1 r")



 z 1 D B 2 3 C A o")
 z 1 A 1 x 1 P 3 2")
- Slides: 60
Cinemática del Sólido Rígido Versión 07/07/2016
FÍSICA GENERAL I Tema 1: Magnitudes físicas. Unidades y medidas Tema 2: Vectores y sistemas de vectores Tema 3: Estática de sistemas Tema 4: Cinemática del punto Tema 5: Cinemática del sólido rígido Tema 6: Cinemática relativa del punto Tema 7: Dinámica del punto Tema 8: Trabajo y energía I Tema 9: Trabajo y energía II Tema 10: Movimiento del punto bajo fuerzas centrales Tema 11: Dinámica del los sistemas I Tema 12: Dinámica de los sistemas II Tema 13: Medios deformables I Tema 14: Medios deformables II Tema 5: Cinemática del sólido rígido Sistema indeformable. Sólido rígido Teorema de las velocidades proyectadas Movimientos de traslación y rotación Velocidades y aceleraciones en el movimiento general de un sistema Movimiento relativo de un sólido rígido Movimiento general de un sólido rígido: eje instantáneo de rotación y deslizamiento mínimo, concepto de axoides
SÓLIDO RÍGIDO O SISTEMA INDEFORMABLE B A Para cualquier par de puntos A y B. . .
TRASLACIÓN (1) k o i P k 1 i 1 j j 1 O 1
TRASLACIÓN (2) k P ¡NO ES UNA ROTACIÓN! i i 1 j O k 1 j 1 O 1
Todos los puntos de un sistema que experimenta una traslación tienen en cada instante la misma velocidad. Todos los puntos de un sistema que experimenta una traslación tienen en cada instante la misma aceleración. Por ser la traslación circular y uniforme de radio 2 m cada punto del sistema tiene una aceleración: Los puntos del sistema describen trayectorias circulares y uniformes de radio 2 m con diferentes centros.
ROTACIÓN CON EJE FIJO (1) P O O P
ROTACIÓN CON EJE FIJO (2) d O P O’
es un punto de la recta es el vector director de la recta
es un punto de la recta es el vector director de la recta
TEOREMA DE LAS VELOCIDADES PROYECTADAS (1) A v. A B v. B Son iguales las proyecciones de las velocidades de dos puntos cualquiera de un sistema indeformable sobre el eje que definen los dos puntos
TEOREMA DE LAS VELOCIDADES PROYECTADAS (2) A v. A B v. B A v. A B v. B
TEOREMA DE LAS VELOCIDADES PROYECTADAS (3) A(0, y. A) v. A v. B B(x. B , 0)
Guía 2 illa Var Guía 1
MOVIMIENTO GENERAL DE UN SÓLIDO RÍGIDO (1) ze z * z xe y z 1 o x x 1 ye oe p o 1 o* x* y*
MOVIMIENTO GENERAL DE UN SÓLIDO RÍGIDO (2) d /dt z * z d /dt p y z 1 o x o 1 x 1 y 1 o* x* y*
MOVIMIENTO GENERAL DE UN SÓLIDO RÍGIDO (3) z d /dt p y z 1 o x o 1 x 1 y 1
REDUCCIÓN GENERAL DE UN SISTEMA DE VECTORES DESLIZANTES R q SISTEMAS DE VECTORES -q. P
MOVIMIENTO GENERAL DE UN SÓLIDO RÍGIDO q O -q v. O q’ * -q’ O v. O*
q Eje instantáneo de rotación y deslizamiento mínimo MOVIMIENTO GENERAL DE UN SÓLIDO RÍGIDO: EJE INSTANTÁNEO DE ROTACIÓN -q E v. E
EJE INSTANTÁNEO DE ROTACIÓN Y DESLIZAMIENTO MÍNIMO v 0 E 1 O
INVARIANTES CINEMÁTICOS, TORSOR CINEMÁTICO La rotación es un invariante La proyección de la velocidad de un punto sobre el eje definido por el vector rotación es un invariante
CLASIFICACIÓN DE LOS SISTEMAS DE VECTORES DESLIZANTES S 11 (R 0, M* 0) Máxima reducción a la resultante y un par Condición eje central: R x ME = 0 S 01 (R=0, M 0) Máxima reducción a un par aplicado en cualquier punto del espacio Eje central no definido S 10 (R 0, M*=0) Máxima reducción resultante en un punto del eje central Condición eje central: ME = 0 S 00 (R=0, M=0)
CLASIFICACIÓN DE LOS MOVIMIENTOS DEL SÓLIDO RÍGIDO vd 0) Instantáneamente el sólido se traslada y rota Condición E. I. R. : x v. E = 0 S 10 ( 0, vd=0) Instantáneamente el sólido sólo rota alrededor del E. I. R. Condición E. I. R. : v. E = 0 S 01 ( =0, v 0) El sólido sólo se traslada E. I. R. no definido S 00 ( =0, v=0) S 11 ( 0, Inmovilidad total
q Eje instantáneo de rotación y deslizamiento mínimo MOVIMIENTO GENERAL DE UN SÓLIDO RÍGIDO: EJE INSTANTÁNEO DE ROTACIÓN -q E v. E
S 10 ( 0, vd =0) Instantáneamente el sólido sólo rota alrededor del E. I. R. Condición E. I. R. : v. E = 0 P Eje instantáneo de rotación y deslizamiento mínimo MOVIMIENTO GENERAL DE UN SÓLIDO RÍGIDO z 1 E x y 1 x 1 z y
POSICIÓN DEL EJE INSTANTÁNEO DE ROTACIÓN EN EL MOVIMIENTO PLANO A I I v. A B v. B A v. A B v. B
CINEMÁTICA DE UNA VARILLA CUYOS EXTREMOS SE DESLIZAN POR LOS EJES COORDENADOS (VELOCIDAD Y ACELERACIÓN ANGULAR) I A v. A L B v. B
CINEMÁTICA DE UNA VARILLA CUYOS EXTREMOS SE DESLIZAN POR EL VÉRTICE DE UN ESCALÓN Y UN PLANO HORIZONTAL (VELOCIDAD Y ACELERACIÓN ANGULAR) I A v. A H B v. B
RODADURA Y EJE INSTANTÁNEO DE ROTACIÓN (1) dx=d R D=2 R vc= R vc R R c q= -q vc=q R q
RODADURA Y EJE INSTANTÁNEO DE ROTACIÓN (2) R c R
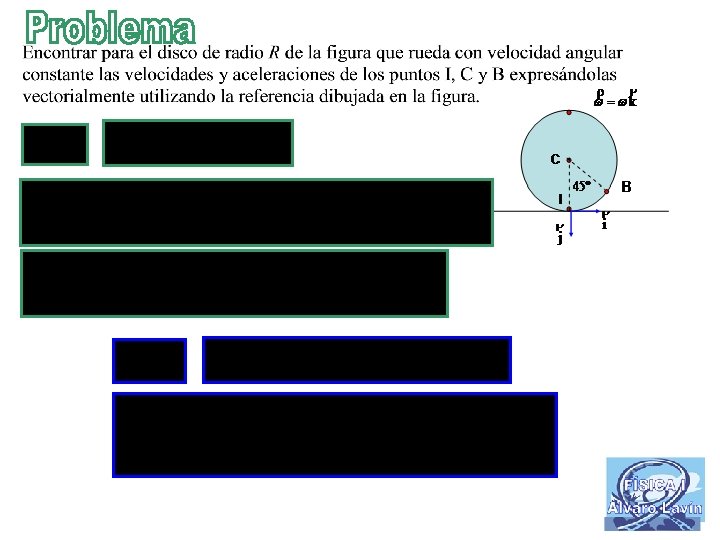
Velocidades y aceleraciones de puntos de una rueda A C B I La aceleración del E. I. R ¡NO es cero!
• La aceleración del centro del disco en cm/s 2. El centro del disco se mueve en una trayectoria rectilínea a 10 cm sobre la recta. Su aceleración es el producto de la aceleración angular por el radio. • La aceleración del punto A en cm/s 2.
• La aceleración del punto I del disco en cm/s 2. • La aceleración del punto A en cm/s 2.
Un disco D de radio 50 cm rueda con velocidad angular constante sobre una recta fija coplanaria con D. La velocidad del centro del disco es de 2 m/s. Calcule, en la posición indicada en el dibujo y referidas a la referencia indicada en la figura La velocidad del punto A del disco en m/s. La aceleración del punto A en m/s 2 El radio de curvatura de la trayectoria del punto A en metros Teniendo en cuenta que en ese instante la aceleración es normal a la trayectoria También puede utilizarse la expresión
TRAYECTORIA DE LOS PUNTOS DE UNA RUEDA (1) t 1=0 O O 1 j P j 1 t 2= t P j i i O i 1 vx(t) = R (1 -cos t) x(t) = R( t-sen t) y(t) = -R( 1 -cos t) vy(t) = -R sen t ax(t) = R 2 sen t ay(t) = -R 2 cos t
MOVIMIENTO DE LOS PUNTOS DEL SISTEMA EN LA RODADURA x(t) = R( t-sen t) y(t) = R( 1 -cos t)
TRAYECTORIA DE LOS PUNTOS DE UNA RUEDA (2) x(t) = R( t-sen t) y(t) = R( 1 -cos t)
TRAYECTORIA DE LOS PUNTOS DE UNA RUEDA (3) x(t) = R t- a sen t y(t) = R – a cos t
TRAYECTORIA DE LOS PUNTOS DE UNA RUEDA (4) x(t) = R t- a sen t y(t) = R – a cos t
Conos rodantes(1) z 1 y 1 x 1
Conos rodantes(2) z 1 B z C A x 1 i O e
• la rotación del cono alrededor de su propio eje • la rotación instantánea del cono • la velocidad del punto del cono que se desplaza más rápido en m/s.
Un cono recto de sección circular y semiángulo de apertura de 30º rueda sin deslizar sobre plano horizontal x 1, y 1 de un sistema de referencia fijo {O, x 1, y 1, z 1}. El vértice del cono siempre coincide con el origen del sistema de referencia mencionado. El cono rueda de forma pasa por encima del eje x 1 del sistema de referencia una vez cada segundo. Si la generatriz del cono tiene una longitud de un metro, calcule los módulos de: • la rotación instantánea del cono • la rotación del cono alrededor de su propio eje. • la velocidad del punto del cono que se desplaza más rápido.
Un cono recto de sección circular y semiángulo de apertura de 30º rueda sin deslizar sobre plano horizontal x 1, y 1 de un sistema de referencia fijo {O, x 1, y 1, z 1}. El vértice del cono siempre coincide con el origen del sistema de referencia mencionado. El cono rueda de forma que pasa por encima del eje x 1 del sistema de referencia una vez cada segundo. Si la generatriz del cono tiene una longitud de un metro, calcule los módulos de: • la aceleración angular del cono • la aceleración del punto de la generatriz del cono que está en contacto con el plano y que pertenece a la base del cono
Cinemática Relativa del punto
FÍSICA GENERAL I Tema 1: Magnitudes físicas. Unidades y medidas Tema 2: Vectores y sistemas de vectores Tema 3: Estática de sistemas Tema 4: Cinemática del punto Tema 5: Cinemática del sólido rígido Tema 6: Cinemática relativa del punto Tema 7: Dinámica del punto Tema 8: Trabajo y energía I Tema 9: Trabajo y energía II Tema 10: Movimiento del punto bajo fuerzas centrales Tema 11: Dinámica del los sistemas I Tema 12: Dinámica de los sistemas II Tema 13: Medios deformables I Tema 14: Medios deformables II Tema 6: Cinemática relativa del punto Movimiento relativo, de arrastre y absoluto Composición de velocidades: velocidades relativa, de arrastre y absoluta Composición de aceleraciones: aceleraciones relativa, de arrastre, de Coriolis y absoluta Condiciones de anulación de una o varias componentes de la aceleración
MOVIMIENTO RELATIVO DE UN PUNTO (1) z p r u 3 z 1 r 1 o u 1 ro x o 1 x 1 y 1 u 2 y
MOVIMIENTO RELATIVO DE UN PUNTO (2) z p r u 3 z 1 r 1 o u 1 ro x o 1 x 1 y 1 u 2 y
MOVIMIENTO RELATIVO DE UN PUNTO (3) z p r u 3 z 1 r 1 o u 1 ro x o 1 x 1 y 1 u 2 y
La plataforma circular de radio R de la figura, rota con velocidad angular constante, arrastrando al sistema de referencia {O, x, y, z} en su movimiento. El sistema {O 1, x 1, y 1, z 1} es fijo. Un insecto se mueve por el eje de abscisas del sistema {O, x, y, z} con velocidad constante v alejándose del centro del disco. Para el instante que se representa en el dibujo, en el que las direcciones de los ejes de los sistemas de referencia coinciden y el insecto está a distancia R/2 del centro del disco, calcule, con respecto al sistema fijo, y expresando las magnitudes vectoriales referidas a ese mismo sistema: La velocidad del insecto La aceleración del insecto
La pequeña hormiga de la figura se mueve por el perímetro de un disco de un metro de radio con velocidad 0. 02 m/s. El disco rueda sobre la recta con velocidad angular de 2 rad/s. Calcule, con respecto al sistema de referencia fijo dibujado en la figura y en la posición de la figura: • La velocidad de la • La aceleración de la
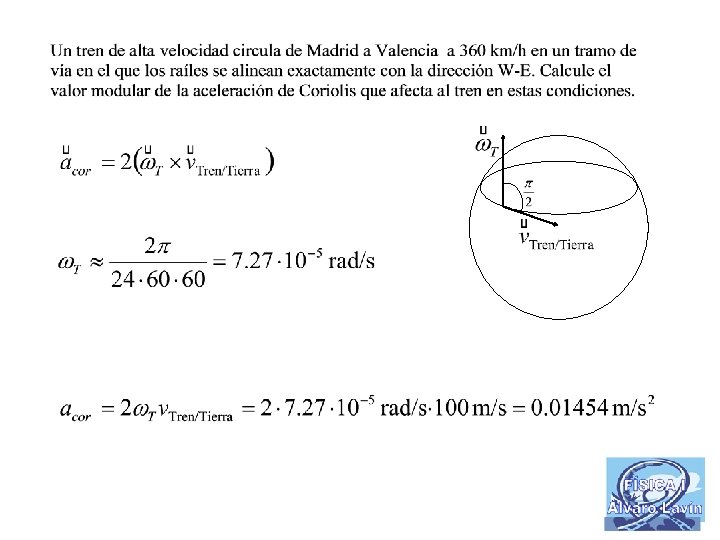
Calcule el valor modular de la fuerza centrífuga por unidad de masa que afecta a cualquier objeto situado sobre la superficie de la Tierra a una latitud de 40° (Radio de la Tierra = 6370 km) FC RT =40°
CADENAS DE SÓLIDOS (Ejemplo 1) z 1 D B 2 3 C A o 1 1 x 1 y 1 4
CADENAS DE SÓLIDOS (Ejemplo 2) z 1 A 1 x 1 P 3 2 B o 1 y 1 I