Otomatik Kontrol Fiziksel Sistemlerin Matematiksel Modellenmesi Hazrlayan Dr






")








 + Y (s) ∑ W(s)")










 Kütlesiz elastik şaft")
 Birinci")


, Çıkış")

, Çıkış")
 Viskoz Kavrama k Elastik şaft +")











")











- Slides: 58
Otomatik Kontrol Fiziksel Sistemlerin Matematiksel Modellenmesi Hazırlayan: Dr. Nurdan Bilgin
Fiziksel Sistemlerin Matematiksel Modellenmesi Matematik Model: Bir dinamik sistemin matematik modeli, sistemin davranışını doğru veya doğruya olabildiğince yakın şekilde ifade eden denklemler kümesi olarak ifade edilebilir. Bir takım kabuller ve basitleştirmeler yapılarak gerçek sistemlerin modelleri çıkarılmaya çalışıldığından, farklı bakış açılarına göre aynı sistemin farklı modellerine ulaşmak mümkündür. Modellemenin temel amacı gerçek sistemin davranışını en doğru veya gerektiğince doğru şekilde ifade edebilmektir.
Fiziksel Sistemlerin Matematiksel Modellenmesi Bu ders kapsamında; § Mekanik Sistemleri § Elektrik Sistemleri § Akışkan Sistemleri §Termal Sistemleri ve § Yukarıda sayılan sistemlerin bileşimlerini çalışacağız.
Öteleme Hareketi Yapan Mekanik Sistemler Pozitif yön + M, kütle
Öteleme Hareketi Yapan Mekanik Sistemler Yay
Öteleme Hareketi Yapan Mekanik Sistemler Viskoz Sönümleyici
Öteleme Hareketi Yapan Mekanik Sistemler Viskoz Sürtünme kuvvetinin yönü daima bağıl harekete karşıdır. (1) (2) Viskoz Sürtünme Pozitif yön + (1) (2) b= Viskoz Sürtünme Katsayısı Büyüklükler aynı Yönler, etki tepkiye göre bulunur.
Öteleme Hareketi Yapan Mekanik Sistemler Özet Tablo Pozitif yön + M, kütle Viskoz Sürtünme kuvvetinin yönü daima bağıl harekete karşıdır. (1) Yay (2) Viskoz Sürtünme Pozitif yön + (1) Viskoz Sönümleyici b= Viskoz Sürtünme Katsayısı (2) Büyüklükler aynı Yönler, etki tepkiye göre bulunur.
Örnek 1: Çeyrek Taşıt Modeli k b
Örnek 1: Çeyrek Taşıt Modeli - ∑ + k - ∑ - - b s - ∑ + Her bir temel denklemi gösteren detaylı blok diyagram
Örnek 1: Çeyrek Taşıt Modeli
Örnek 1: Çeyrek Taşıt Modeli
Örnek 1: Çeyrek Taşıt Modeli
Örnek 1: Çeyrek Taşıt Modeli
Örnek 1: Çeyrek Taşıt Modeli
Örnek 1: Çeyrek Taşıt Modeli X(s) + Y (s) ∑ W(s)
Örnek 1: Çeyrek Taşıt Modeli
Örnek 1: Çeyrek Taşıt Modeli k b s
Örnek 2
Örnek 2
Örnek 2 Kütlenin Serbest Cisim Diyagramı
Örnek 2
Örnek 2
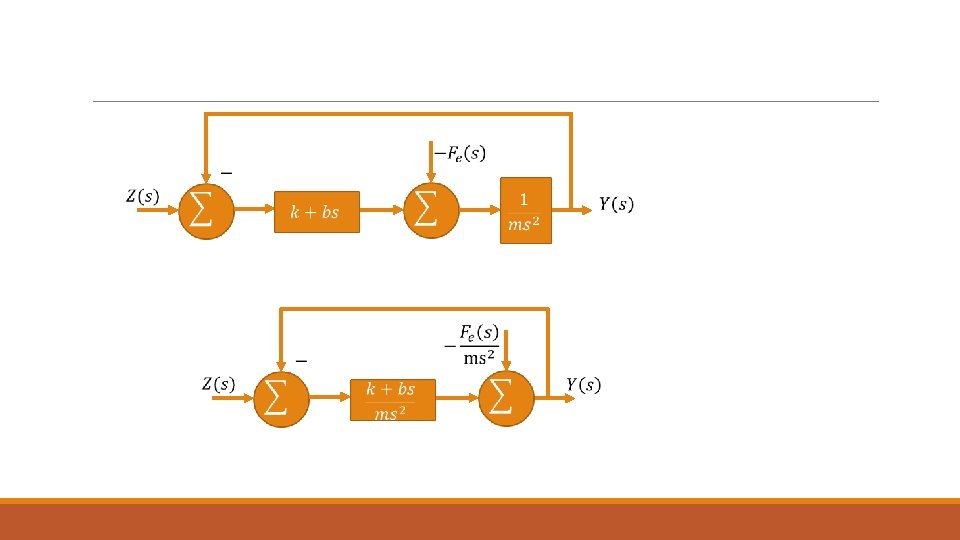
Örnek 2 Şimdi elde ettiğimiz TF’nun blok diyagram gösterimini çizelim.
Örnek 2 Aynı blok diyagramı daha önce öğrendiğimiz çarpanlara ayırma kuralına göre şu şekilde de gösterebiliriz.
Örnek 2
Dönme Hareketi Yapan Mekanik Sistemler α + Pozitif Yön J (1) Kütlesiz elastik şaft (1) (2) k (2) (1) (2)
Örnek 1: Dönel Mekanik Sistemlerin Blok Diyagramı Şeklinde Gösterimi Örnek 1: Giriş ω(t) Birinci Durum Çıkış θ(t) İkinci Durum Çıkış φ(t) ω(t) b φ(t) Elastik Şaft Motor Viskoz sürtünmeli kavrama k θ(t) J
Örnek 1
Örnek 1
Blok diyagramlar Sistemlerin Blok Diyagramı Şeklinde Gösterimi Örnek 1: Birinci Durum Giriş; ω(t), Çıkış θ(t) ω(t) b φ(t) Elastik Şaft Motor Viskoz sürtünmeli kavrama Ω(s) b + ∑ k Φ(s) k θ(t) J Θ(s)
Örnek 1
Blok diyagramlar Sistemlerin Blok Diyagramı Şeklinde Gösterimi Örnek 1: İkinci Durum Giriş; ω(t), Çıkış φ(t) ω(t) b φ(t) Elastik Şaft Motor Viskoz sürtünmeli kavrama Ω(s) b + ∑ + θ(t) k J Φ(s) k
Örnek 2: Dönel Mekanik Sistem Motor b Tm(s) Viskoz Kavrama k Elastik şaft + θ 2(s) ∑ Te(s) +
Örnek 2: Dönel Mekanik Sistem
Örnek 2: Dönel Mekanik Sistem +
Örnek 2: Dönel Mekanik Sistem
Örnek 2: Dönel Mekanik Sistem
Örnek 2: Dönel Mekanik Sistem
Örnek 2: Dönel Mekanik Sistem
Örnek 2: Dönel Mekanik Sistem
Örnek 2: Dönel Mekanik Sistem
Örnek 2: Dönel Mekanik Sistem
Örnek 2: Dönel Mekanik Sistem
Örnek 2: Dönel Mekanik Sistem k
Dönüştürücü Mekanik Elemanlar Kaldıraç (manivela)
Dönüştürücü Mekanik Elemanlar Dişli Kutusu Dişli kutusu Dişli Oranı, n Kremayer Dişlisi (Rack and Pinion)
Örnek 3: Dönüşüm Elemanı ve Öteleme Mekanik Sistemi k 1 b k 2
Örnek 3: Dönüşüm Elemanı ve Öteleme Mekanik Sistemi
Örnek 3: Dönüşüm Elemanı ve Öteleme Mekanik Sistemi
Örnek 3: Dönüşüm Elemanı ve Öteleme Mekanik Sistemi
Örnek 3: Dönüşüm Elemanı ve Öteleme Mekanik Sistemi
Örnek 3: Dönüşüm Elemanı ve Öteleme Mekanik Sistemi
Örnek 3: Dönüşüm Elemanı ve Öteleme Mekanik Sistemi
Örnek 3: Dönüşüm Elemanı ve Öteleme Mekanik Sistemi
Örnek 3: Dönüşüm Elemanı ve Öteleme Mekanik Sistemi
Özet Bu derste, q Fiziksel sistemlerin matematiksel modellenmesi konusuna giriş yaptık. q Mekanik sistemleri üç başlık altında inceledik qÖteleme hareketi yapan mekanik sistemler q Dönme hareketi yapan mekanik sistemler q. Dönüştürücü mekanik elemanlar