7 4 Nyquist Stability Criterion 1 Introduction to

7 -4 Nyquist Stability Criterion

1. Introduction to Nyquist stability criterion The Nyquist stability criterion determines the stability of a closed-loop system from its open-loop frequency response and open-loop poles, and there is no need for actually determining the closed-loop poles. To determine the stability of a closed-loop system, one must investigate the closed-loop characteristic equation of the system.

We consider the following typical closed-loop system: where From the above diagram, we have We define

which is also called the characteristic equation of the closed-loop system and will play an important role in stability analysis. In fact, we have Further, we assume that deg(N 1 N 2)<deg(D 1 D 2), which implies that both the denominator and nominator polynomials of F(s) have the same degree.

2. Preliminary Study Consider, for example, the following open-loop transfer function: whose closed-loop characteristic equation is which is analytic everywhere except at its singular points. For each point analytic in s plane, F(s) maps the point into F(s) plane. For example, s=2+j: F(s)=2 j. Further, we have the following conclusion:

Conformal mapping: For any given continuous closed path in the s plane that does not go through any singular points, there corresponds a closed curve in the F(s) plane. s-plane F(s) plane
-Plane A B -1 1 0 G G ׳")
Example. Consider Case 1: s-plane F(s)-Plane A B -1 1 0 G G ׳ D H -2 C 2 F s: clockwise 3 E -1 0 E ׳ D ׳ H ׳ 1 C ׳ 2 3 A ׳ F: clockwise F encircles the origin:
 plane s-plane A B E ׳ D H -2 G C")
Case 2: F(s) plane s-plane A B E ׳ D H -2 G C F 1 E s: clockwise 0 D ׳ -1 G ׳ 0 A ׳ 1 C ׳ F: clockwise F encircles the origin:

Case 3: F ׳ s-plane A B C D H -2 G F E s: clockwise E ׳ G ׳ H ׳ D ׳ -1 0 -1 F(s) plane 0 1 C ׳ A ׳ B ׳ F: counterclockwise F encircles the origin:

Case 4: It can be verified that when s encloses both the pole and zero in the clockwise direction, the number of the F encircles the origin is 1+1=0.
 has two zeros and one pole are enclosed by s,")
If, for example, F(s) has two zeros and one pole are enclosed by s, it can be deduced from the above analysis that F encircles the origin of F plane one time in the clockwise direction as s traces out s.
 Let F(s) be a ratio of two polynomials")
Mapping theorem (The principle of argument) Let F(s) be a ratio of two polynomials in s. Let P be the number of poles and Z be the number of zeros of F(s) that lie inside a closed contour s, which does not pass through any poles and zeros of F(s). Then the s in the s-plane is mapped into the F(s) plane as a closed curve, F. The total number N of counterclockwise encirclements of the origin of the F(s), as s traces out s in the clockwise direction, is equal to N=P Z
")
3. The Nyquist Stability Criterion For a stable system, all the zeros of F(s) must lie in the left-half s-plane.

Therefore, we choose a contour s, say, Nyquist path, in the s-plane that encloses the entire right-half s-plane. The contour consists of the entire j axis ( varies from to + ) and a semicircular path of infinite radius in the right-half s plane. Nyquist contour As a result, the Nyquist path encloses all the zeros and poles of F(s)=1+G(s)H(s) that have positive real parts. s-plane

Now, let P be the number of the unstable open-loop poles, which is assumed to be known, N be the number of encirclements of the origin of F(s) in counterclockwise direction, which, by drawing the curve, is also known, and Z be the number of the unstable closed-loop poles, which is unknown. Then by applying the Mapping Theorem, we have N=P Z. If Z=0, the system is stable; if Z>0, the system is unstable with the number of unstable poles being Z. Question: How to obtain the curve of F(s) as s traces out s in clockwise direction?

By assumption, Nyquist contour s-plane It is clear that when s traverses the semicircle of infinite radius, F(s) remains a constant. That is, the encirclements of the origin of F(s) only determines by F(j ) as varies from to + provided that no zeros or poles lie on the j axis.

Example. Consider a unity feedback system whose open-loop transfer function is as follows F(j ) The system is stable.
 GH(j ) Clearly, the encirclement")
Further, since compare the two curves below: F(j ) GH(j ) Clearly, the encirclement of the origin in F plane is equivalent to the encirclement of 1 point in GH plane!
")
Example. Consider a unity feedback system whose open-loop transfer function is as follows G(s) The system is unstable.

Example. Consider a single-loop control system, where Determine its stability. The system is stable. G(s)H(s)

Nyquist stability criterion A system is stable if and only if from N = P Z we can obtain that Z=0, where P is the number of the open -loop poles in the right-hand half s-plane and N is the number of the encirclements of the point ( 1, j 0) of G(j )H(j ) in the counterclockwise direction.
H(j ) and the plot of G( j )H(")
Because the plot of G(j )H(j ) and the plot of G( j )H( j ) are symmetrical with each other about the real axis. Hence, we can modify the stability criterion as N = (P – Z)/2, where only the polar plot of G(j )H(j ) with varying from 0 to + is necessary. Im Im Re -1 0 Re -1 G(s)H(s) 0 G(s)H(s)

Example. Consider a unity feedback system whose open-loop transfer function is as follows Investigate its stability by using Nyquist criterion. Solution: Obviously, P=1 (nonminimum phase plant). Now, drawing its Nyquist plot yields: G(j ) The system is stable.

Example. Consider a unity feedback system whose open-loop transfer function is as follows Using Nyquist plot, determine its stability. Solution: Obviously, P=0. Now, drawing its Nyquist plot yields:

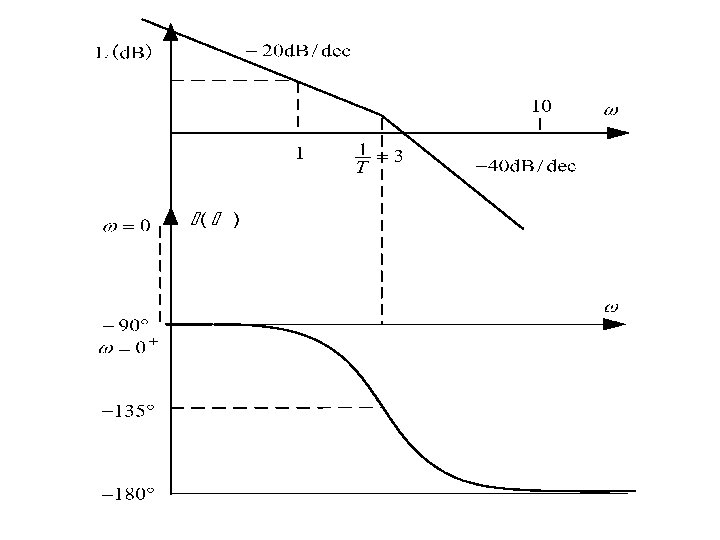
4. Nyquist Criterion Based on Bode diagram Again, we consider the open-loop transfer function with Nyquist curve below: where P=0, N= 1 and the system is unstable. The key is the point that the Nyquist curve crosses the negative real axis is less than 1 (abs(A)>1).

The Bode diagram is: N =1 The system is unstable because the phase angle plot crosses the 1800 line in the region of 20 log G(j ) >0.

We use N to denote the number of crosses of 1800 line in the region of 20 log G(j ) >0 if each across makes the phase angle less than 1800. Similarly, we use N+ to denote the number of crosses of 1800 line in the region of 20 log G(j ) >0 if each across makes the phase angle larger than 1800. The Nyquist Theorem can be interpreted as: Theorem: The system is stable if and only if from N+ N = (P – Z)/2 we can obtain that Z=0.

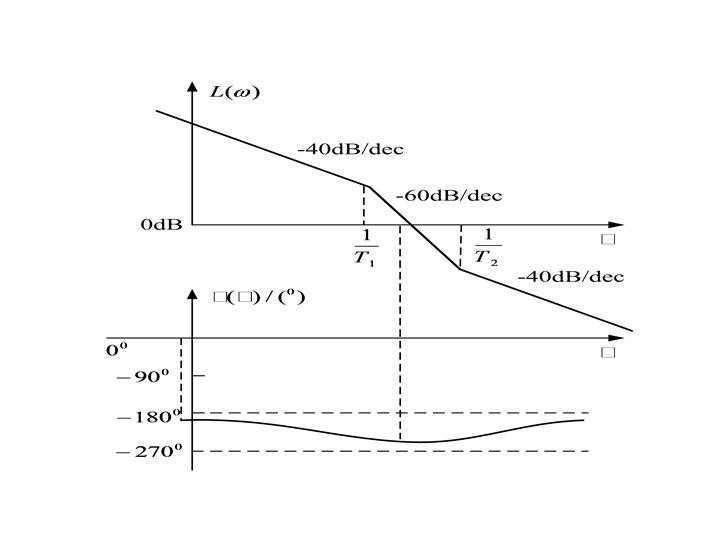
Example. Both the Nyquist plot and Bode diagram of an open-loop minimum phase transfer function are shown below. Determine its stability.
H(s) involves Poles and Zeros on the j Axis Consider")
5. Special case when G(s)H(s) involves Poles and Zeros on the j Axis Consider the following open-loop transfer function: which does not satisfy the Nyquist Theorem because s is a singular point. Therefore, the contour s must be modified. A way of modifying the contour near the origin is to use a quarter-circle with an infini-tesimal radius (>0): where varies from 00 to 900 as varies from 0 to 0+.

A modified contour s : The modified s implies that we regard 1/s as a stable pole. s-plane j 0+ =0 Then, for the controlled plant with integral factor 1/s, we have where 1/s rotates from 00 to 900 with an infinite radius as varies from 0 to 0+.

j =0 j 0+ The integral factor 1/s rotates from 00 to 900 with an infinite radius as varies from 0 to 0+.

s-plane GH-plane C B’ B -1 C’ The Nyquist curve starts from real axis when =0 and rotates 900 as =0+. N = (P – Z)/2 Z=0, the system is stable.

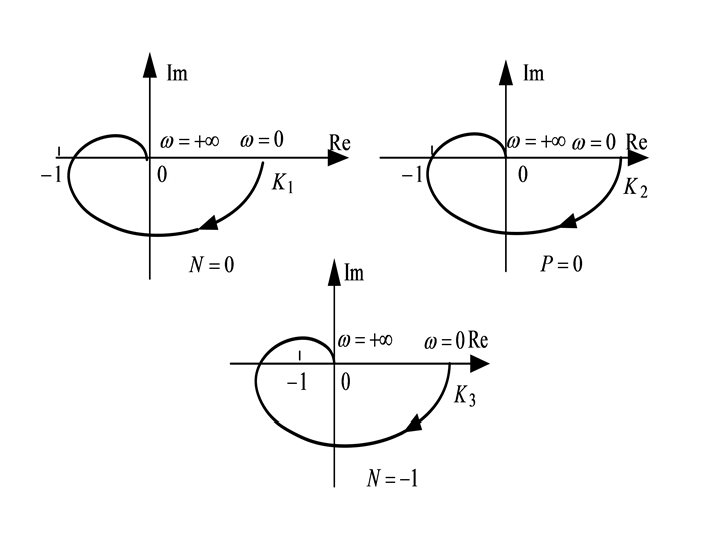
Example. Let the open-loop transfer function be Determine its stability by using Nyquist Theorem. Solution: When =0, When =0+, Hence, when >0+,
/2 Z=2. The system is unstable.")
P=0, N= 1 N=(P Z)/2 Z=2. The system is unstable.
/2 Z=2. The system is unstable.")
P=0, N =1, N+=0 N+ N =(P Z)/2 Z=2. The system is unstable.

6. Stability Analysis Example. Let the open-loop transfer function be Determine its stability by using Nyquist Theorem. Solution: When =0, When =0+ Hence, when >0+,

If T 1>T 2, the Nyquist curve is shown below. Since P=0, N= 1 N=(P Z)/2 Z=2. The system is unstable.

If T 2>T 1, the Nyquist curve is shown below. Since P=0, N=0 N=(P Z)/2 Z=0. The system is stable.
/2 Z=0. The system is stable.")
P=0, N =1/2, N+=1/2 N+ N =(P Z)/2 Z=0. The system is stable.

Example. Consider a unity feedback system whose open-loop transfer function is as follows Investigate its stability by using Nyquist criterion. Solution: Obviously, P=1 (nonminimum phase plant). Now, drawing its Nyquist plot yields: The system is unstable.

7. Conditionally Stable Systems A conditionally stable system is stable for the value of the open-loop gain lying between critical values, but it is unstable if the open-loop gain is either increased or decreased sufficiently.

Example. Consider a single-loop control system, where open-loop transfer function is Determine the range of K so that the system keeps stable.

Example. Consider a single-loop control system, where open-loop transfer function is Discuss its stability by using Nyquist stability criterion.
- Slides: 46