Regimurile fundamentale de funcionare ale S R A

 Mărimea")
. Structura funcţională a unui sistem de")
 Să se refacă topologia sistemului (formalismul intrare-ieşire) pentru")
- MODEL MATEMATIC u(t)")


 Ecuaţia dinamică a sistemului pur dinamic de ordinul II (n=2, m=0): Soluţia ecuaţie")
\" depinde")


 de")
 (t) Reprezentarea convenţională (t) p (t) 1/ k")
 1+(t) Este semnalul determinist aperiodic cel mai")
: Un semnal oarecare poate fi exprimat astfel:")
 (t) sys (t- ) sys u( ) (t- )d")
 1+(t) sys h(t) funcţia indicială (răspuns) Schimbarea de variabilă:")
 excitaţie derivată sys y(t) răspuns în această relaţie facem două")
")

:")
:")

, y 1(t) Aplicaţie: cazul (t>T 0), y 2(t)")
 Structura sistemului de verificare a răspunsului i(t)")



 şi perioadă (T), forma")





:")



^2) ans =-1/4*i*a*t*exp(-i*a*t) » ilaplace(a*j/4/(s-a*j)^2) ans =1/4*i*a*t*exp(i*a*t) » simplify(ilaplace(-a*j/4/(s+a*j)^2)+ilaplace(a*j/4/(s-a*j)^2)) ans =-1/2*a*t*sin(a*t) » ilaplace(a^4/s/(s^2+a^2)^2)")
^2; » A=limit(s*Y, s, 0) » B=limit((s+a*i)^2*Y, s, -a*i)")

- Slides: 46
Regimurile fundamentale de funcţionare ale S. R. A: Regimul de funcţionare a unui SRA se apreciază după forma variaţiei în timp a mărimii de ieşire y(t) (pentru y(t) se foloseşte deseori denumirea de răspuns al SRA). Regimul de funcţionare al unui SRA cuprins între două regimuri staţionare se numeşte regim dinamic sau regim tranzitoriu al sistemului de reglare automată. Mărimea de ieşire y(t) are o componentă forţată yf(t) şi o componentă liberă y (t), astfel că se poate scrie relaţia:
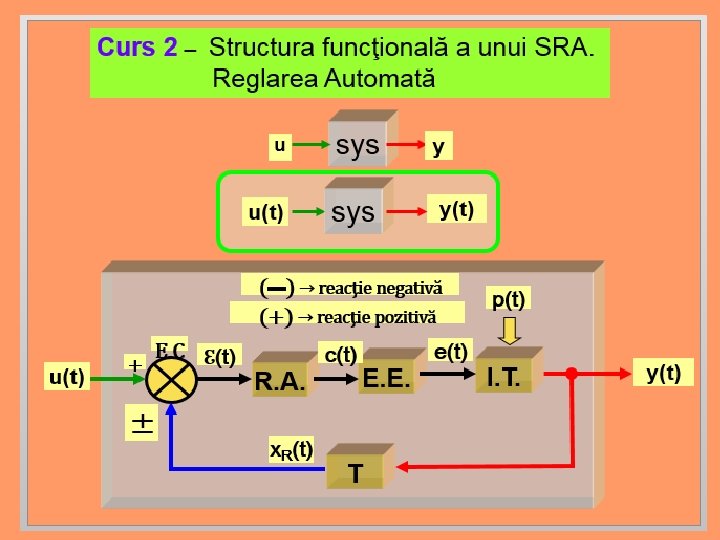
Tabelul Simboluri şi semne convenţionale întrebuinţate în schemele bloc MĂRIMEA (SEMNALUL SAU FUNCŢIUNEA) Mărimea de intrare [u(t)] Mărimea de ieşire [y(t)] Punct de ramificare (punct de bifurcaţie) a unui semnal Element de comparaţie pt. două semnale SIMBOL ŞI SEMN CONVENŢIONAL SEMNIFICAŢIA sys Săgeata indică sensul semnalului informaţional u [x] y [x] u(t) + E. C ℇ(t) ± x. R(t) Ramificarea semnalului (vectorului informaţional) în două direcţii. Suma sau diferenţa semnalelor funcţionale
Structura funcţională o reprezentare simbolică, (sau schema funcţională). Structura funcţională a unui sistem de reglare automată este acea schemă în care se indică elementele componente ale sistemului de reglare automată (SRA) destinaţia lor şi legăturile funcţionale între ele. Descrierea componenţei structurale SRA: Mărimile de timp u(t) - mărimea de intrare; y(t) - mărimea de ieşire; (t) - mărimea de eroare; x. R(t)- mărimea de reacţie; c(t) - mărimea de comandă; e(t) - mărimea de execuţie; Descriere blocuri E. C -element de comparaţie; R. A -regulator automat (sau algoritm de reglare); E. E - element de execuţie; I. A (I. T) - instalaţie tehnologică; E. M (T) - element de măsurare (traductor);
Problematizare S. R. A: Problema 1) Să se refacă topologia sistemului (formalismul intrare-ieşire) pentru toate ieşirile posibile netriviale? (nu se modifică dimensiunea sistemelor componente) Problema 2) Să se refacă topologia sistemului (formalismul intrare-ieşire) pentru toate intrările posibile netriviale? Problema 1) u sys Problema 2) y y 1=? y 2=? y 3=? y 4=? y 5=? =? u topologia SRA = ? u 1=? u 2=? u 3=? u 4=? sys y y 1=? y 2=? y 3=? y 4=? y 5=? =?
Caracterizarea analitică a unui sistem de reglare automată (S. R. A)- MODEL MATEMATIC u(t) sys y(t) Ecuaţia dinamică a unui sistem liniar, continuu şi omogen u 1 liniar y 1 u 2 liniar y 2 u 1 + u 2 liniar y 1 + y 2 0 t=timp continuu -parametrii de sistem fizic. t
OBS. Dacă prin transformări elementare obţinem combinaţii ale parametrilor de sistem fizic, numărul acestor parametri fiind egal cu - ordinul sistemului, atunci spunem că am obţinut cei parametrii de sistem. - ordinul sistemului - variabila independentă (timpul) - indicii de variaţie ai variaţilor succesive pentru mărimea de ieşire respectiv mărimea de intrare. relaţia de ordine care reprezintă condiţia de realizabilitate fizică a sistemului. condiţia sistemelor automate anticipative, (variaţii simultane succesive de acelaşi ordin pentru mărimea de ieşire, respectiv mărimea de intrare). condiţia sistemelor paranormale. OBS 1. Echilibrul asigurat de descrierea formală a ecuaţiei dinamice descrie o primă formă pt. modelul matematic al unui sistem automat (descris în timp continuu). 2. Ecuaţia dinamică se obţine dacă se realizează analiza fenomenologică a sistemului.
Aplicaţie: Rezolvarea simbolică a ecuaţiei dinamice pentru sistemele de ordinul I şi II: Se utilizează operatorul diferenţial de ordin "k" a) Ecuaţia dinamică a sistemului pur dinamic (n=1, m=0): >>pretty(dsolve('T*Dy+y=u', 'y(0)=0')) u - exp(- t/T) u b) Ecuaţia dinamică a sistemului anticipativ (n=m=1): Soluţia ecuaţie dinamice (în condiţia iniţială nulă, corespunzătoare sistemului anticipativ): >> syms T u; >> y=pretty(dsolve('T*Dy+y=T*Du', 'y(0)=1')) y(t)=exp(-1/T*t)*Int(diff(u(u), u)*exp(1/T*u), u=0. . t)+exp(-1/T*t)
c) Ecuaţia dinamică a sistemului pur dinamic de ordinul II (n=2, m=0): Soluţia ecuaţie dinamice (în condiţii iniţiale nule): >> syms a 2 a 1 a 0 b 0 u >> y=dsolve('a 2*D 2 y+a 1*Dy+a 0*y=b 0*u', 'y(0)=0', 'Dy(0)=0') y=1/a 0*b 0*u-1/2*b 0*u*(a 1+(a 1^2 -4*a 2*a 0)^(1/2))/(a 1^2 -4*a 2*a 0)^(1/2)/a 0*exp(1/2*(a 1 -(a 1^2 -4*a 2*a 0)^(1/2))*t/a 2)+1/2*b 0*u*(a 1 -(a 1^2 -4*a 2*a 0)^(1/2))/(a 1^24*a 2*a 0)^(1/2)/a 0*exp(-1/2*(a 1+(a 1^2 -4*a 2*a 0)^(1/2))*t/a 2
Reacţia negativă şi atenuarea perturbaţiilor OBS: Se presupune că mărimea de ieşire "y(t)" depinde de mărimea de perturbaţie. p(t)=2 p(t) e(t) KM y(t) – KM y(t) KR Efectul reacţiei negative asupra perturbaţiei.
Concluzie: reacţia negativă are efect stabilizant.
1. Clasificarea sistemelor dinamice după structură: Prin structura fundamentală se înelege o reuniune de elemente ale cărei proprietăţi nu se regăsesc, ca atare, printre proprietăţile elementelor componente. Proprietăţile unei structuri fundamentale aparţin în primul rând conexiunilor dintre elementele componente (elemente de bază), respectiv reuniunii structurate a elementelor şi raporturilor dintre elementele de bază. Dupa prezenţa sau absenţa reacţiei se disting sisteme cu structură: deschisă respectiv închisă.
Semnale de intrare deterministe importante pentru studiul sistemelor De regulă, variaţia semnalului u(t) de la intrarea unui sistem automat este cunoscută şi se reprezintă printr-o funcţie continuă. impulsul Dirac impulsul treaptă unitară periodice deterministe SEMNALE aleatoare u(t) sys y(t) -sinusoidale -combinaţi liniare sinusoidale în relaţie armonică -pseudoaleatoare neperiodice -cvasiperiodice, compuse din (aperiodice) sinusoide ce nu au frecvenţele în relaţie armonică -tranzitorii Clasificarea complexităţii semnalelor
Semnalul impulsul unitar ideal (impulsul DIRAC) (t) Reprezentarea convenţională (t) p (t) 1/ k (t- ) 1/ 2 t 0 0 Numai teoria (t) Aria=1 1/ t ( 1) Fig. -Impulsul real t 1/ 1 0 k 2 distribuţilor permite definirea corectă a lui (t): 1 t
Semnalul treaptă unitară ideală (funcţia lui Heaviside) 1+(t) Este semnalul determinist aperiodic cel mai important. 1 1/2 0 t Proprietatea de eşantionare a funcţiei impuls unitate sau proprietatea de filtrare a distribuţiei Dirac: Dacă t 0 =0 Derivata funcţiei treaptă unitară în punctul de discontinuitate t=0 este un impuls Dirac localizat la t=0.
Proprietatea de sondare a funcţiei delta (t): Un semnal oarecare poate fi exprimat astfel: convoluţia cu (t): Descompunerea unei funcţii u(t) în integrală de funcţii treaptă unitate Descompunerea unei funcţii u(t) în integrală de distribuţii delta unitate. Deoarece t , pentru t , limita superioară a integralei este "t" şi cea inferioară este zero:
funcţia pondere impuls unitate (excitaţie) (t) sys (t- ) sys u( ) (t- )d sys w(t) funcţia pondere (răspuns) w(t- ) u( )w(t- )d sys răspuns derivata produsului de convoluţie excitaţie oarecare funcţia pondere
funcţia indicială treaptă unitate (excitaţie) 1+(t) sys h(t) funcţia indicială (răspuns) Schimbarea de variabilă: t v, t=const. , pentru: =0 v=t, pentru =t v=0, (dv= d ) funcţia indicială (răspuns) Concluzie funcţia pondere
Convoluţia semnalelor excitaţie u(t) excitaţie derivată sys y(t) răspuns în această relaţie facem două operaţii reciproce: 1. Derivăm pe u(t); 2. Integrăm pe w(t): derivata produsului de convoluţie funcţia indicială
Integrala Duhamel derivata produsului de convoluţie (Aplicaţie integrala Duhamel)
Aplicaţie- integrala Duhamel Circuitului RC i se aplică un impuls dreptunghiular de tensiune de forma: a) Să se determine analitic y(t)=? în cazurile: (t≤T 0) şi (t>T 0) b) Să se verifice soluţia în interfaţa Matlab-Simulink. Soluţie:
Cazul (t≤T 0):
Cazul (t>T 0):
Exemplul numeric: R=330 k , C=2. 2 F, U 0=1, T 0 =0. 5 s » t=0: 0. 001: 0. 5; » y 1=(1/330000)*exp(-t/0. 726); plot(t, y 1); grid » t=0. 5: 0. 0001: 1; » y 2=-(1/330000)*(1 -exp(-0. 5/0. 726))*exp(-(t-0. 5)/0. 726); » plot(t, y 2); grid
Aplicaţie: cazul (t≤T 0), y 1(t) Aplicaţie: cazul (t>T 0), y 2(t)
Aplicaţie: i(t) Structura sistemului de verificare a răspunsului i(t)
Elemente de calcul operaţional- Transformata Laplace L original Proprietăţile funcţiei original: original continuă Exemple importante de transformate Laplace: imagine
Teoreme ale transformatei Laplace: T 1: Transformata Laplace este o transformată liniară. Aditivitate: omogenitate: T 2: Teorema asemănării originalului
T 3: Teorema întârzierii originalului
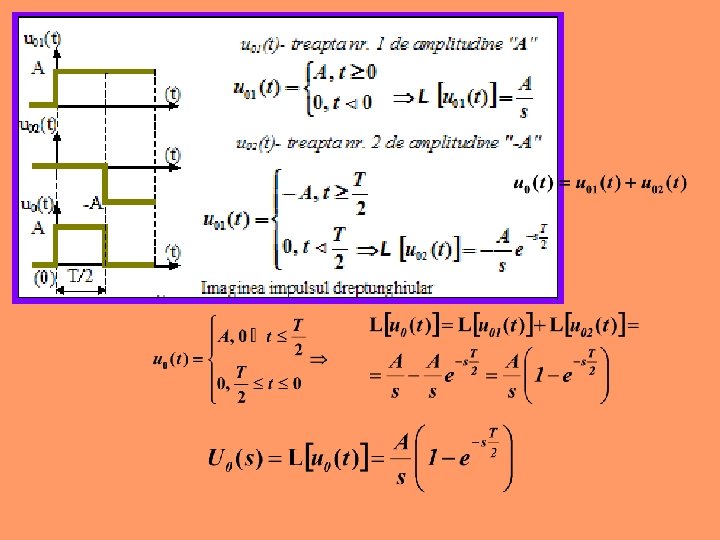
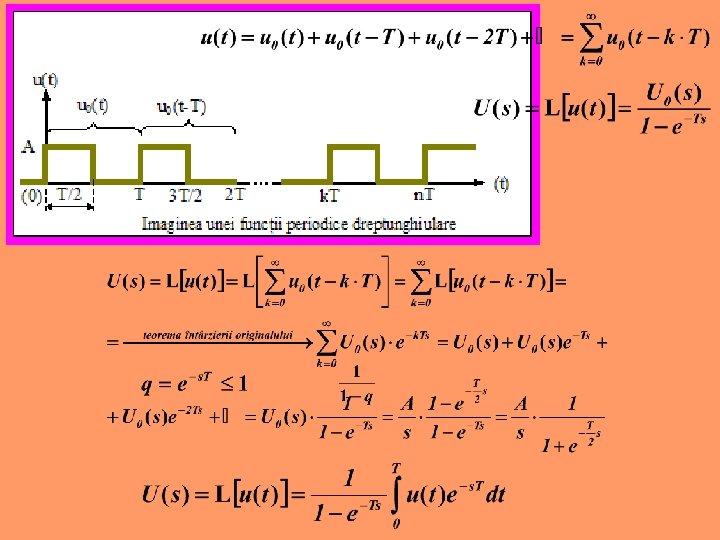
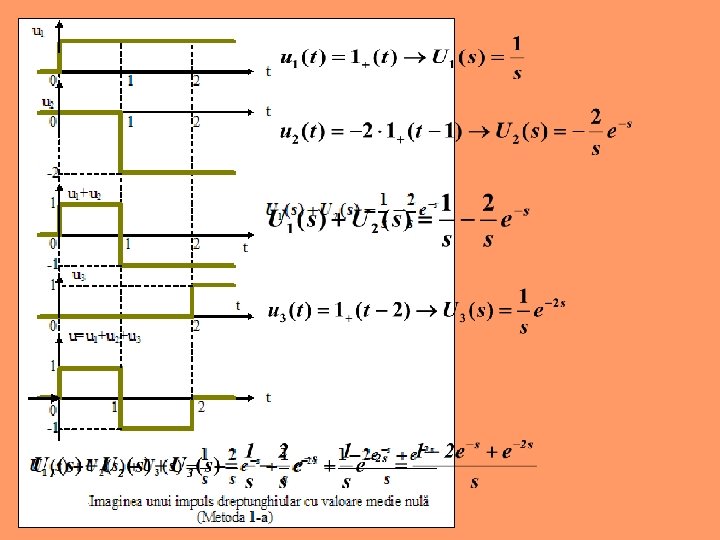
Pentru impulsul dublu dreptunghiular cu factorul de umplere ( ) şi perioadă (T), forma compactă este:
Aplicaţie
T 4: Teorema deplasării imaginii:
T 5: Teorema derivării originalului:
T 6: Teorema derivării imaginii T 7: Teorema integrării originalului:
T 8: Teorema integrării imaginii:
T 9: Teorema produsului a două imagini (produsul de convoluţie):
T 11: Teorema I-a de dezvoltare a lui Heaviside:
T 12: Teorema II-a de dezvoltare a lui Heaviside: Dacă polul sk are ordinul de multiplicitate qk, k=1, 2, …, n, atunci: Dacă Y(s) este o fracţie raţională cu un pol în origine, atunci ea este imaginea funcţiei original:
Exemplul
» ilaplace(-a*j/4/(s+a*j)^2) ans =-1/4*i*a*t*exp(-i*a*t) » ilaplace(a*j/4/(s-a*j)^2) ans =1/4*i*a*t*exp(i*a*t) » simplify(ilaplace(-a*j/4/(s+a*j)^2)+ilaplace(a*j/4/(s-a*j)^2)) ans =-1/2*a*t*sin(a*t) » ilaplace(a^4/s/(s^2+a^2)^2) ans =a^4*(1/a^4 -1/a^4*cos(a*t)-1/2/a^3*t*sin(a*t))
» syms a s » Y=a^4/s/(s^2+a^2)^2; » A=limit(s*Y, s, 0) » B=limit((s+a*i)^2*Y, s, -a*i) B=-1/4*i*a » C=limit(diff((s+a*i)^2*Y), s, -a*i) C=-1/2 » D=limit((s-a*i)^2*Y, s, a*i) D=1/4*i*a » E=limit(diff((s-a*i)^2*Y), s, a*i) T 13: Teorema valorii finale:
T 14: Teorema valorii iniţiale: