Modern Control System EKT 318 Time Response Transient

 • • Impulse functions (*) Step functions (*) Ramp")

 + E(s) C(s) - Find the performance of the system")










 …. (1)")



, use Laplace Table")
 System")
 overdamped critical")




")




- Slides: 37
Modern Control System EKT 318 Time Response Transient and Steady-State Response Analysis
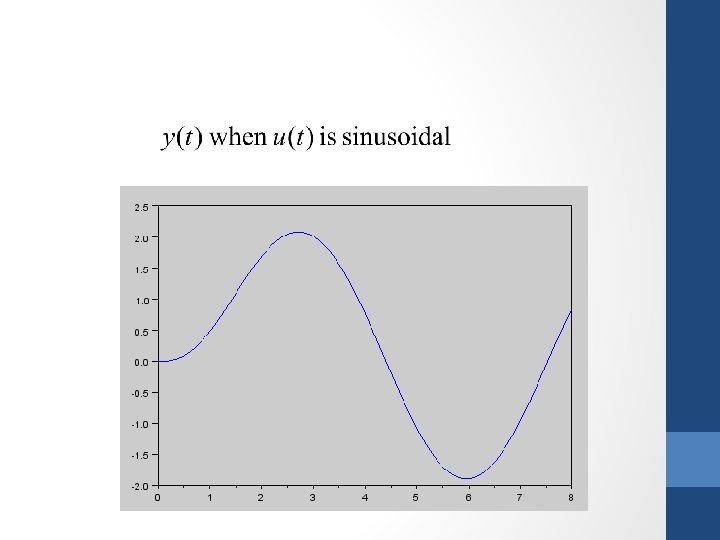
Typical Test Signals (Input signals) • • Impulse functions (*) Step functions (*) Ramp functions (*) Parabolic functions • Sinusoidal functions (Later in frequency analysis) • White noise
Test signals step Impulse unit impulse function is 1 ramp parabolic
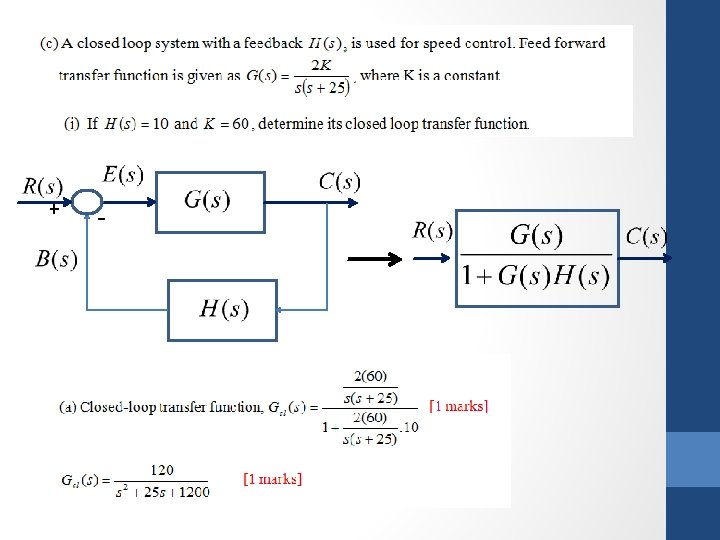
First Order Systems R(s) + E(s) C(s) - Find the performance of the system when the following test signal is used: a) Unit step response, b) Unit ramp response, c) Unit Impulse response
Laplace Table …
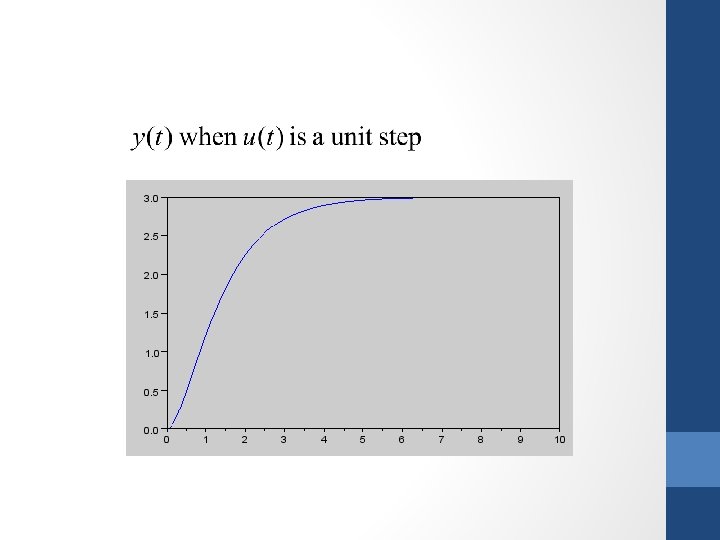
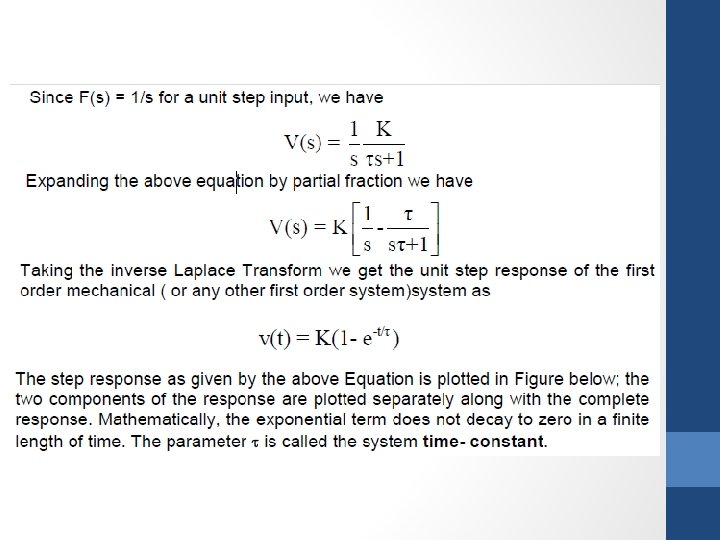
Unit step response of first order systems: Partial fraction
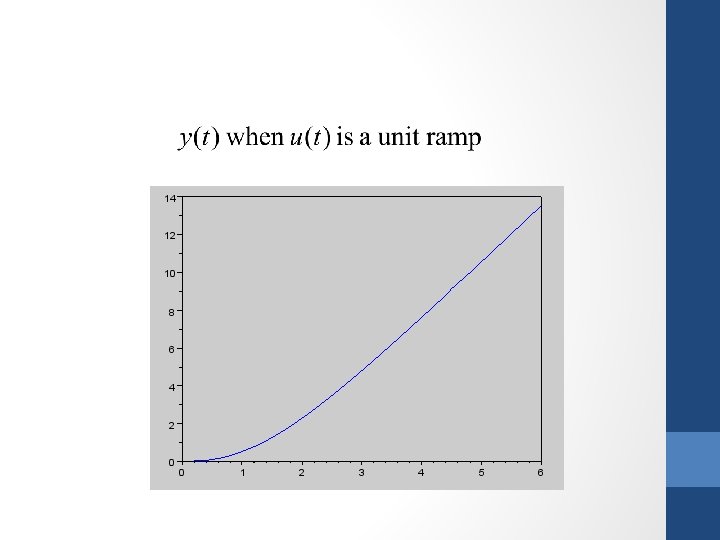
Unit ramp response of first order systems: Inverse Laplace, from Laplace table
Unit impulse response of first order systems:
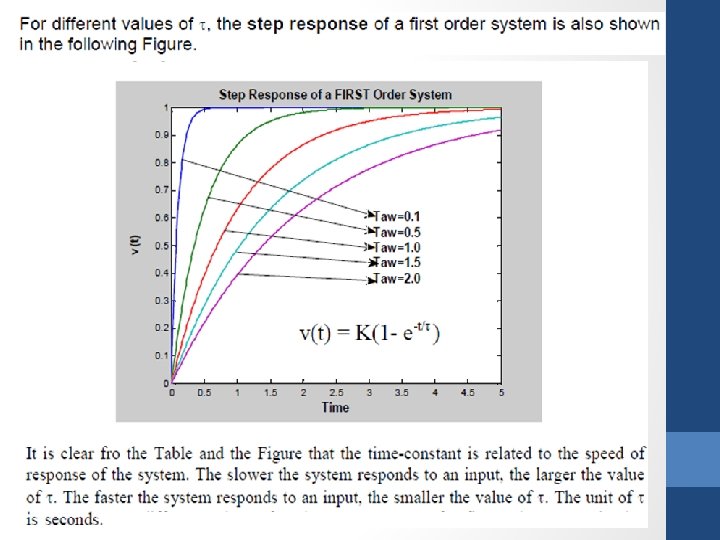
First order system parameter Consist of gain, K and Time constant,
First order system example:
1 2
3
Where:
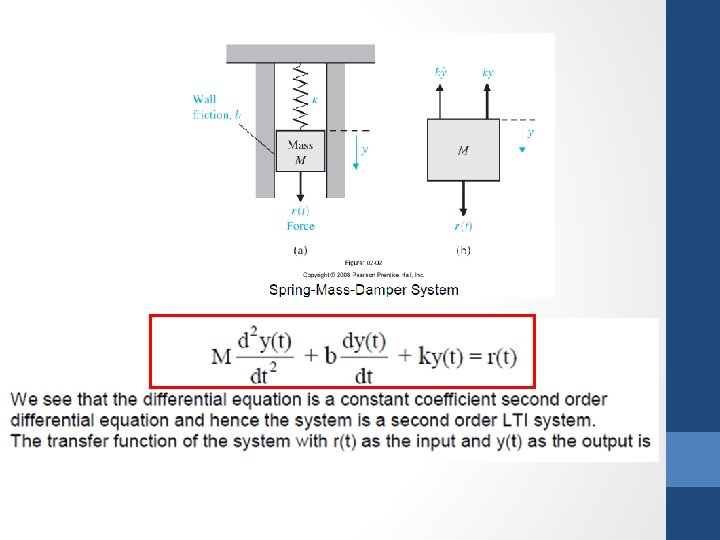
First order system • Step 1: convert figure into Free Body Diagram • Step 2: Obtain the differential equation • Eg: • Step 3: obtain the transfer function: • Eg: • Step 4: rearrange the equation to the transfer function of 1 st order system: • Step 5: Convert into time domain using inverse Laplace
Second order system parameter Transfer function of a second order system (K=1) …. (1)
Second Order System Let us start with an example
Convert using laplace table: Factorize, you got
Example: Find the output, if the input is Unit Step The objective is to find how the output looks like ? R(s) r(t) Y(s) y(t) http: //www. emathhelp. net/calculators/algebra-2/partial-fraction-decomposition-calculator/
Step 1: find the partial fraction To find the output r(t), use Laplace Table (refer week 1 slides):
• System is often classified by its damping ratio, : Nature x(t) System Imaginary Un-damped Complex & conjugate Under-damped Real & equal Critically damped Real & distinct Over-damped overdamped critical damping • > 1 System is overdamped • = 1 System is critical damping • < 1 System is underdamped t underdamped
• System is often classified by its damping ratio, : x(t) overdamped critical damping • > 1 System is overdamped • = 1 System is critical damping • < 1 System is underdamped t underdamped
Real Life Example of damping. . Consider a door that uses a spring to close the door once open. This can lead to any of the above types of damping depending on the strength of the damping. If the door is undamped it will swing back and forth forever at a particular resonant frequency. If it is underdamped it will swing back and forth with decreasing size of the swing until it comes to a stop. If it is critically damped then it will return to closed as quickly as possible without oscillating. Finally, if it is overdamped it will return to closed without oscillating but more slowly depending on how overdamped it is.
Real-Life Example
Example 2: Find Unit Impulse response of a second order system The objective is to resemble
Constant From Laplace Table: Inverse Laplace:
Unit Impulse response (contd…)
Example: final exam question
What can you conclude from the system?
Modelling Overview
b which is damping