ClosedLoop System ClosedLoop Control System OpenLoop Amplifier with





.")
 Closed-loop speed control system. (b) Transistorized closed-loop speed control system.")



.")

 Block diagram model. (b) Signal-flow graph model.")


 to (a) a unit input step r(t) and (b) a unit")
 for a unit step input (solid line) and for a unit")

 open-loop (without feedback) and (b) closed-loop with feedback. The")



 MATLABscript. (b) Step response for Ka=10 and Ka=80.")
 MATLABscript. (b) Disturbance response for Ka=80.")
 A single-loop feedback control system. (b) The error response for a unit step")

- Slides: 49
Closed-Loop System
Closed-Loop Control System
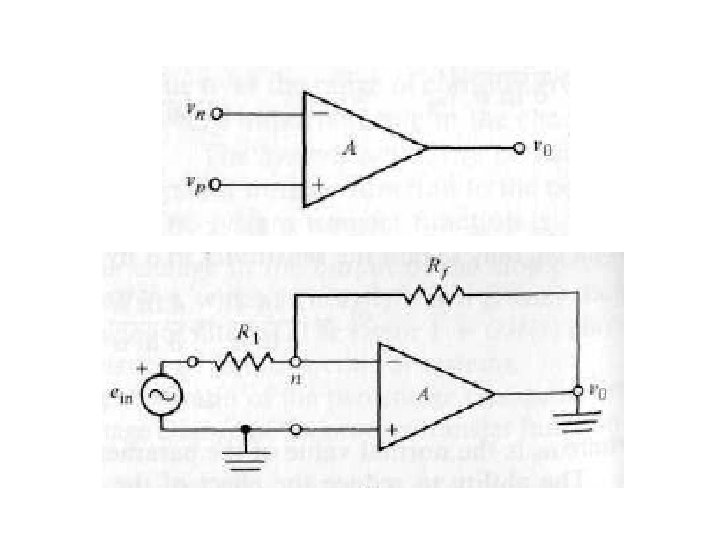
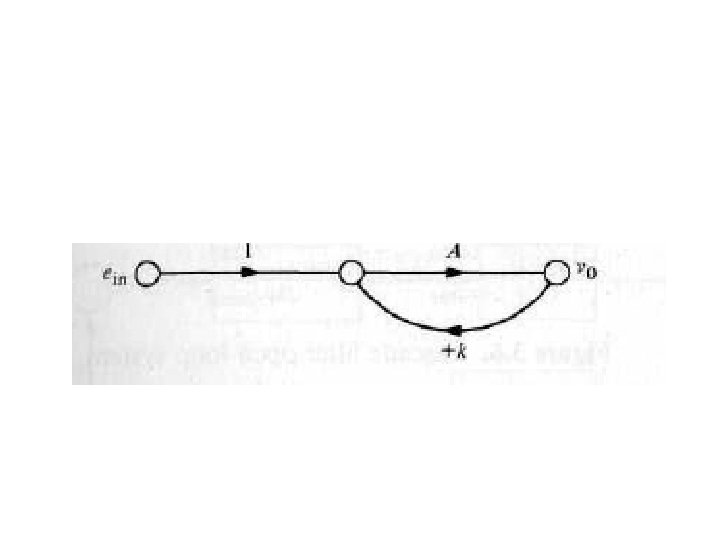
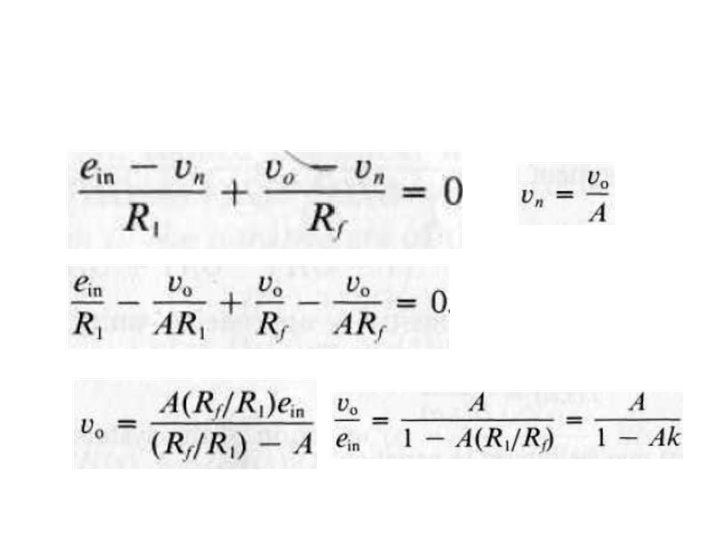
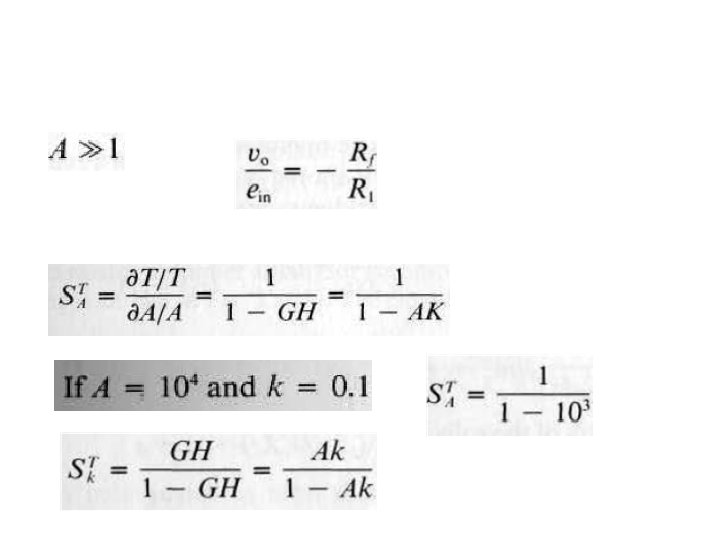
Open-Loop Amplifier with Feedback
Block diagram model of feedback amplifier assuming Rp>>R 0 of the amplifier.
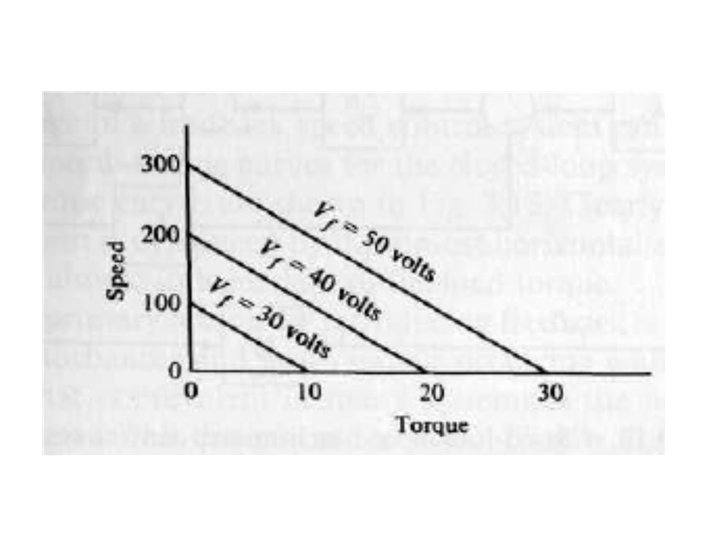
Transient Response of Control Systems
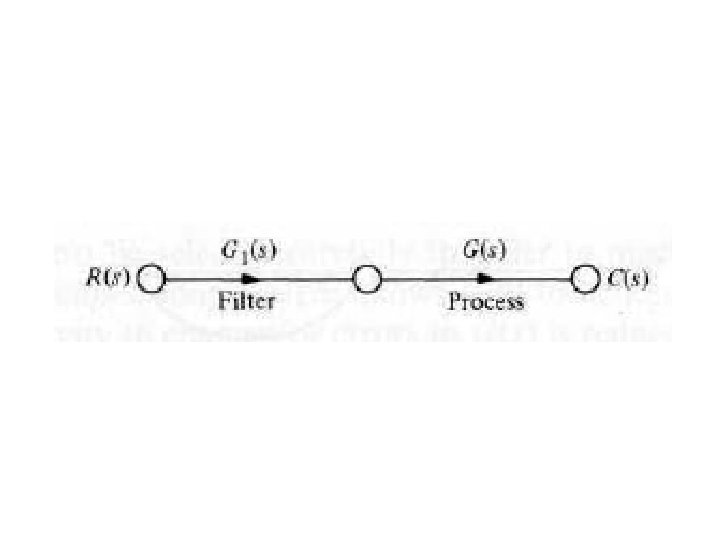
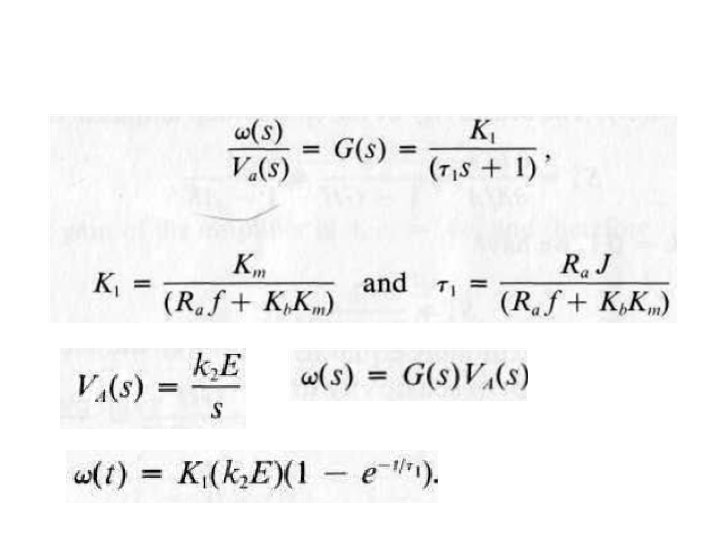
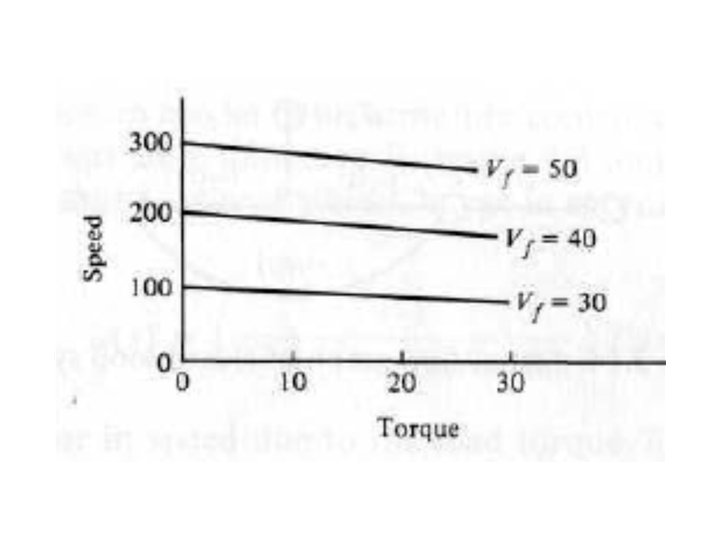
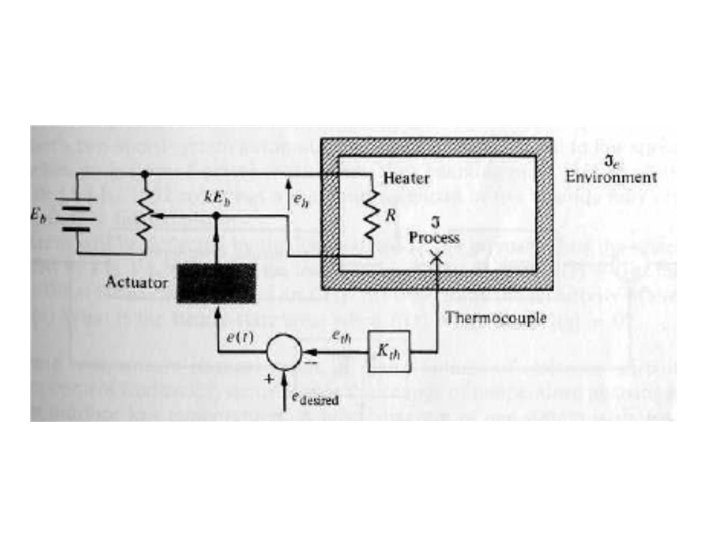
Open-loop speed control system (without feedback).
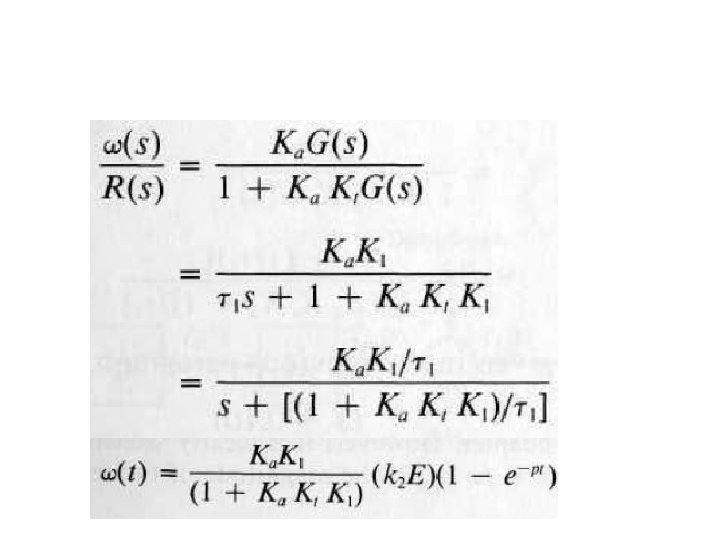
(a) Closed-loop speed control system. (b) Transistorized closed-loop speed control system.
The response of the open-loop and closed-loop speed control system when τ 5 10 and K 1. Ka. Kt =100. The time to reach 98% of the final value for the open-loop and closed- loop system is 40 seconds and 0. 4 second, respectively.
Disturbance in Feedback Control System
Steel rolling mill.
Open-loop speed control system (without external feedback).
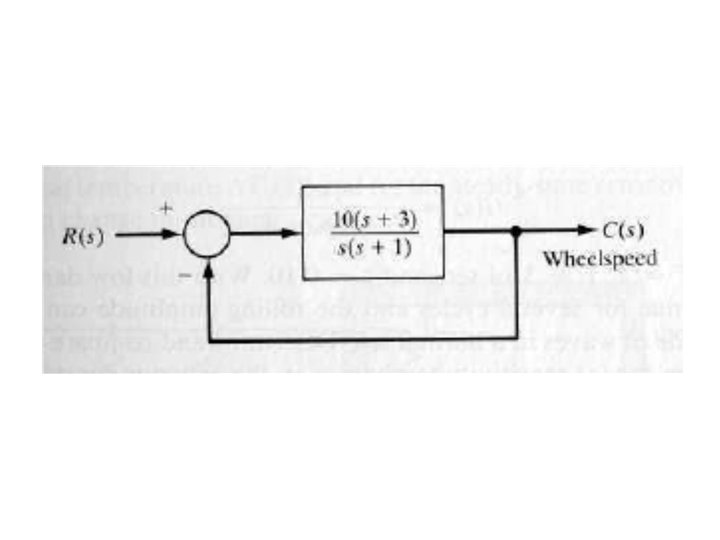
Closed-loop speed tachometer control system
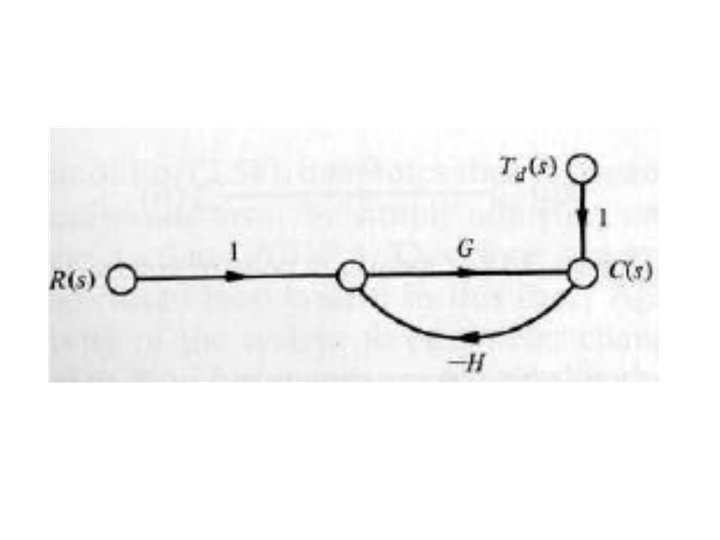
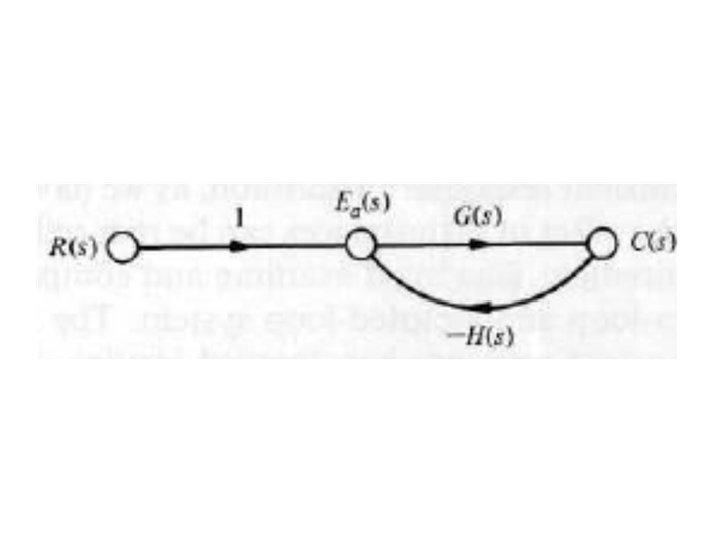
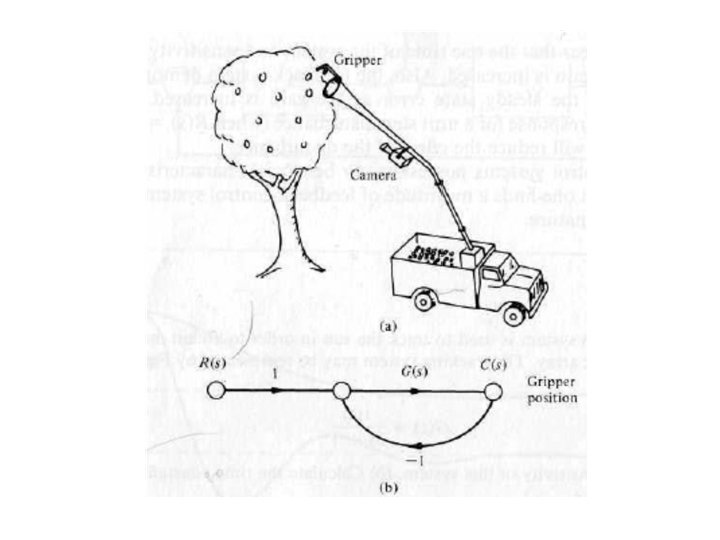
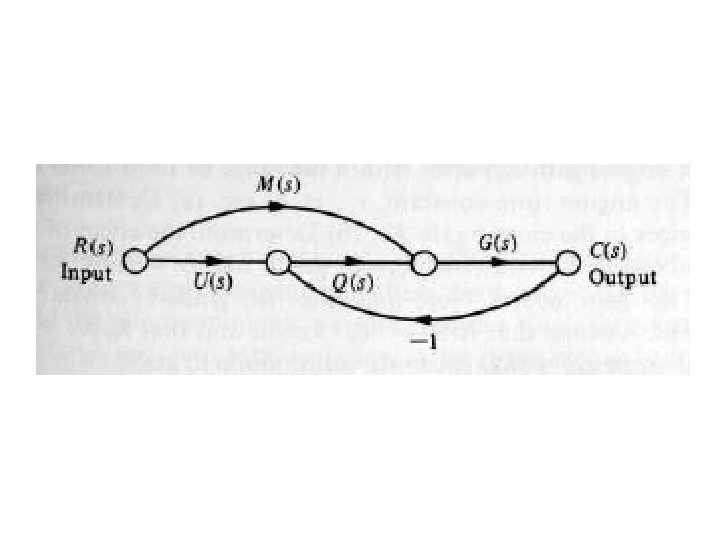
Closed-loop system. (a) Block diagram model. (b) Signal-flow graph model.
Closed-loop control system with measurement noise.
A block diagram model of a boring machine control system
The response y(t) to (a) a unit input step r(t) and (b) a unit disturbance step input D(s) 5 1/s for K=100.
The response y(t) for a unit step input (solid line) and for a unit step disturbance (dashed line) for K=20.
The solar-powered Mars rover, named Sojourner, landed on Mars on July 4, 1997 andwas deployed on its journey on July 5, 1997. The 23 -pound rover is controlled by anoperator on Earth using controls on the rover [21, 22]. (Photo courtesy of NASA. )
Control system for rover; (a) open-loop (without feedback) and (b) closed-loop with feedback. The input is R(s)=1/s.
The magnitude of the sensitivity of the closed-loop system for the Mars rover vehicle.
Control system for disk drive head reader.
Disk drive head control system with the typical parameters of Table 2. 11.
Closed-loop response. (a) MATLABscript. (b) Step response for Ka=10 and Ka=80.
Disturbance step response. (a) MATLABscript. (b) Disturbance response for Ka=80.
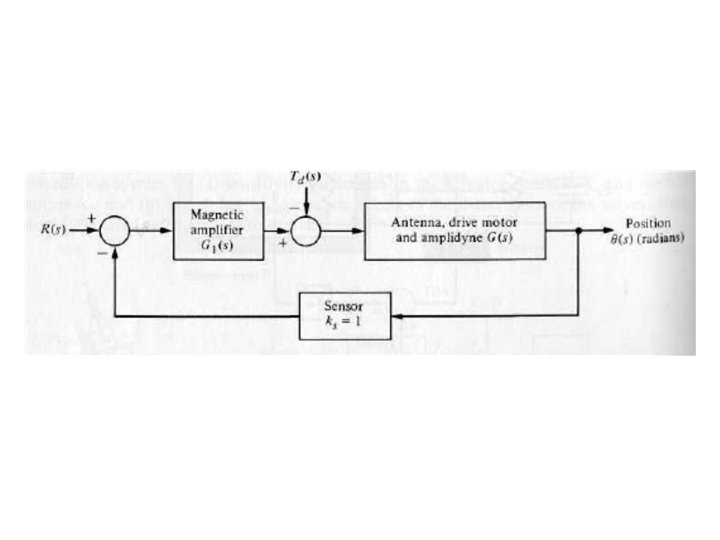
(a) A single-loop feedback control system. (b) The error response for a unit step disturbance when R(s) 0