Fuzzy Theory Timothy J Ross 2004 Fuzzy Logic
, Fuzzy Logic with Engineering")



:describes the process of transforming the original p-dimensional feature space")
:Partitioning")

 Crisp")


 + weight ;fuzzy set • • 如果 B 退化為")
 Weight Autoclaving")



 Autoclaving: • Bpressure Highpressure = 0 Max of Mins Bpressure")
 Annealing: • Bpressure Highpressure = 0 • Btemperature Lowtemperature =")
 Sintering: • Bpressure Lowpressure = max [(0 0), (0 0.")
 Transport: • Bpressure Zeropressure = max [(0 1), (0 0.")
2 = 0. 665 (B, Annealing)2 = 0.")

 淡江大學 資訊管理系所 侯永昌 30")


















 variables and control")




 x 1 x")
 = 1 and")
 = 1. 6,x 2(3) =")


 Height / Velocity")






- Slides: 85
模糊理論 Fuzzy Theory 淡江大學 資訊管理系所 侯永昌 教科書:Timothy J. Ross (2004), Fuzzy Logic with Engineering Applications, 2 nd Edition, John Wiley & Sons, Ltd. 新月圖書代理 淡江大學 資訊管理系所 侯永昌
Chapter 12 Fuzzy Pattern Recognition 淡江大學 資訊管理系所 侯永昌 1
Pattern Recognition • Pattern recognition can be defined as a process of identifying structure in data by comparisons to known structure; the known structure is developed through methods of classification. • The purpose of the pattern recognition system is to assign each input to one of c possible pattern classes (or data clusters). Feedback Training data for classification Classification 淡江大學 資訊管理系所 侯永昌 Pattern recognition New data Discrimination 2
Feature Analysis • Feature analysis refers to methods for conditioning the raw data so that the information that is most relevant for classification and interpretation (recognition) is enhanced and represented by a minimal number features. • Feature analysis consists of three components: 1、Feature nomination (FN):refers to the process of proposing the original p features. 2、Feature selection (FS):refers to choosing the "best" subset of s features (s<p) from the original p features. 淡江大學 資訊管理系所 侯永昌 3
Feature Analysis 3、Feature extraction (FE):describes the process of transforming the original p-dimensional feature space into an s-dimensional space in some manner that "best" preserves or enhances the information available in the original p-space. • The usual benchmark of feature quality is 1、the empirical error rate achieved by a classifier on labeled test data. 2、algorithmic interpretations of the data to domain experts: do the computed results make sense? 淡江大學 資訊管理系所 侯永昌 4
Partitions of the Feature Space • Classifier Design (Crisp classifier or Fuzzy classifier ):Partitioning the feature space into c regions, one for each subclass in the data. It seeks designs that minimize the average cost of errors. • Cluster Analysis:Measure the similarity between pairs of observations and evaluate the partition once they are formed. • Cluster Validity:Identify the value c that gives the most plausible number of clusters in the data for the analysis. 淡江大學 資訊管理系所 侯永昌 5
Partitions of the Feature Space Feature nomination Design data Test data Feature selection Classifier design Error rate Feature extraction Cluster analysis Cluster validity 淡江大學 資訊管理系所 侯永昌 6
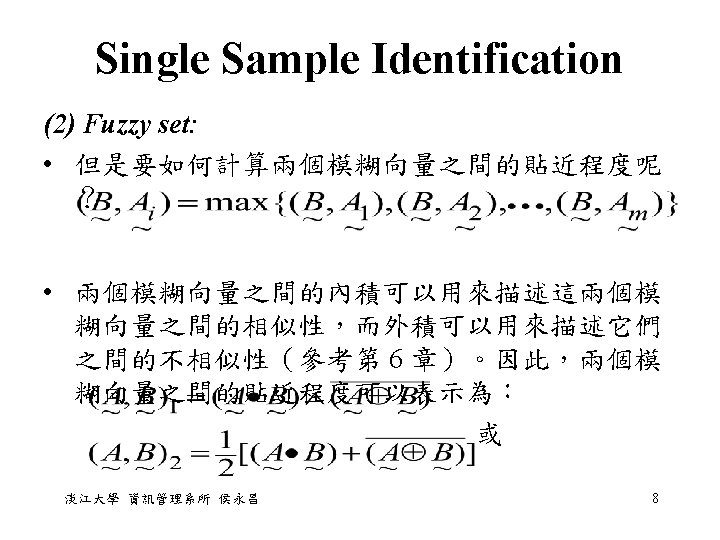
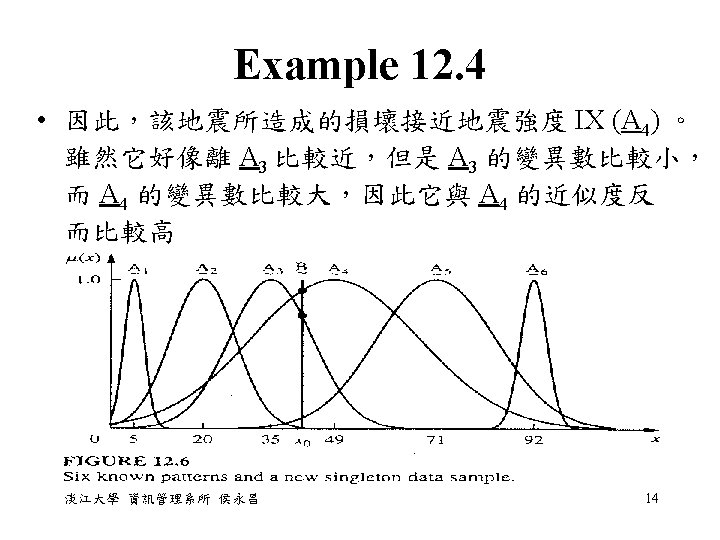
Single Sample Identification • 假設我們有一個 knowledge base,其中儲存了 m 個已知的 patterns。現在有一個未知分類的 data sample,應該如何將它分類? (1) Crisp singleton: A 1 x 0 A 2 A 3 Example 12. 1. (Same as example 4. 1) x 0 = { A = 850, B = 500, C = 450 } 是什麼三角形? 淡江大學 資訊管理系所 侯永昌 7
Multi-feature Pattern Recognition 1、Nearest Neighbor Classifier;Crisp singleton • test data, y = {y 1, y 2, . . . , ym}, 與那一個 sample data, xi = {xi 1, xi 2, . . . , xim}, 最接近,它就被分到那一個 sample data 的那一類 2、Nearest Center Classifier;Crisp singleton • test data, y = {y 1, y 2, . . . , ym}, 與那一個 cluster center, vi = {vi 1, vi 2, . . . , vim}, 最接近,它就屬於那一個 cluster 淡江大學 資訊管理系所 侯永昌 15
Multi-feature Pattern Recognition 4、Approaching degree(貼近度) + weight ;fuzzy set • • 如果 B 退化為 Crisp singleton, B = x = {x 1, x 2, . . . , xm}, 則貼近度的公式就變成 淡江大學 資訊管理系所 侯永昌 17
Example 12. 6 • An industrial production process with 3 features Mode(Pattern) Weight Autoclaving Annealing Sintering Transport 1. 0 Zero 0 Pressure 0. 5 High Low Zero Temperature 0. 25 High Low Zero Low 2 淡江大學 資訊管理系所 侯永昌 4 Flow rate 0. 25 Zero Low High 6 8 Pressure(k. Pa) 18
Example 12. 6 1. 0 Zero 0 Low 200 High 400 Zero Low 1. 0 0 20 淡江大學 資訊管理系所 侯永昌 600 800 Temperature(0 C) High 40 60 80 Flow rate(gph) 19
Example 12. 6 1、系統的讀數是 Crisp singleton,X = {5 k. Pa, 150 C, 5 gph} • autoclaving (x) = (0. 5)(0. 25) + (0. 25)(0. 5) = 0. 25 • annealing (x) = (0. 5)(0. 25) + (0. 25)(0. 75) + (0. 25)(0. 5) = 0. 4375 • sintering (x) = (0. 5)(0. 75) + (0. 25)(0. 5) = 0. 5625 Max! • transport (x) = (0. 5)(0) + (0. 25)(0) = 0. 0625 • ===> 表示系統現在是在 sintering 的狀態 淡江大學 資訊管理系所 侯永昌 20
Example 12. 6 1、系統的讀數是 fuzzy set,X = {2 k. Pa, 300 C, 0 gph} 1. 0 0 Zero 1. 0 Low Zero 0 4 Low 200 Zero 0 2 400 淡江大學 資訊管理系所 侯永昌 6 High 600 8 Pressure(k. Pa) 800 Temperature(0 C) High Low 20 High 40 60 80 Flow rate(gph) 21
Example 12. 6 (a) Autoclaving: • Bpressure Highpressure = 0 Max of Mins Bpressure Highpressure = 0 Min of Maxs • Btemperature Hightemperature = max [(0 0), (0. 5 0), (1 0. 166), (0. 375), (0 0. 5)] = 0. 375 Btemperature Hightemperature = min [(0 0), (0. 5 0), (1 0. 166), (0. 375), (0 0. 5)] = 0 • Bflow Zeroflow = max [(1 1), (0. 5 0), (0 0)] = 1 Bflow Zeroflow = min [(1 1), (0. 5 0), (0 0)] = 0 • (B, Autoclaving)2 = 0. 5[(0+1)/2] + 0. 25[(0. 375+1)/2] + 0. 25[(1+1)/2] = 0. 665 淡江大學 資訊管理系所 侯永昌 22
Example 12. 6 (b) Annealing: • Bpressure Highpressure = 0 • Btemperature Lowtemperature = max [(0 0), (0 0. 5), (0. 5 1), (0. 75), (1 0. 5), (0. 5 0), (0 0)] = 0. 75 Btemperature Lowtemperature = min [(0 0), (0 0. 5), (0. 5 1), (0. 75), (1 0. 5), (0. 5 0), (0 0)] = 0 • Bflow Zeroflow = max [(1 1), (0. 5 0), (0 0)] = 1 Bflow Zeroflow = min [(1 1), (0. 5 0), (0 0)] = 0 • (B, Annealing)2 = 0. 5[(0+1)/2] + 0. 25[(0. 75+1)/2] + 0. 25[(1+1)/2] = 0. 7175 淡江大學 資訊管理系所 侯永昌 23
Example 12. 6 (c) Sintering: • Bpressure Lowpressure = max [(0 0), (0 0. 25), (1 0. 5), (0. 6), (0 0. 75), (0 1)] = 0. 6 Bpressure Lowpressure = min [(0 0), (0 0. 25), (1 0. 5), (0. 6), (0 0. 75), (0 1)] = 0 • Btemperature Zerotemperature = max [(0 1), (0 0. 5), (0. 25), (0. 5 0), (1 0)] = 0. 25 Btemperature Zerotemperature = min [(0 1), (0 0. 5), (0. 25), (0. 5 0), (1 0)] = 0 • Bflow Lowflow = max [(1 0), (0. 7), (0. 5 1), (0 0)] = 0. 7 Bflow Lowflow = min [(1 0), (0. 7), (0. 5 1), (0 0)] = 0 • (B, Sintering)2 = 0. 5[(0. 6+1)/2] + 0. 25[(0. 25+1)/2] + 0. 25[(0. 7+1)/2] = 0. 7687 淡江大學 資訊管理系所 侯永昌 24
Example 12. 6 (d) Transport: • Bpressure Zeropressure = max [(0 1), (0 0. 75), (0. 6), (1 0. 5), (0. 33), (0 0. 25), (0 0)] = 0. 6 Bpressure Zeropressure = min [(0 1), (0 0. 75), (0. 6), (1 0. 5), (0. 33), (0 0. 25), (0 0)] = 0 • Btemperature Zerotemperature = max [(0 1), (0 0. 5), (0. 25), (0. 5 0), (1 0)] = 0. 25 Btemperature Zerotemperature = min [(0 1), (0 0. 5), (0. 25), (0. 5 0), (1 0)] = 0 • Bflow Highflow = max[(1 0), (0. 5 0), (0. 11), (0 0. 14)] = 0. 11 Bflow Highflow = min [(1 0), (0. 5 0), (0. 11), (0 0. 14)] = 0 • (B, Transport)2 = 0. 5[(0. 7+1)/2] + 0. 25[(0. 25+1)/2] + 0. 25[(0. 11+1)/2] = 0. 7188 淡江大學 資訊管理系所 侯永昌 25
Example 12. 6 • 總結上述的運算,我們可以得到 (B, Autoclaving)2 = 0. 665 (B, Annealing)2 = 0. 7175 (B, Sintering)2 = 0. 7687 Max is here (B, Transport)2 = 0. 7188 • 如果系統現在的讀數 X = {2 k. Pa, 3000 C, 0 gph},就表示系統現在是在 sintering 的狀 態 淡江大學 資訊管理系所 侯永昌 26
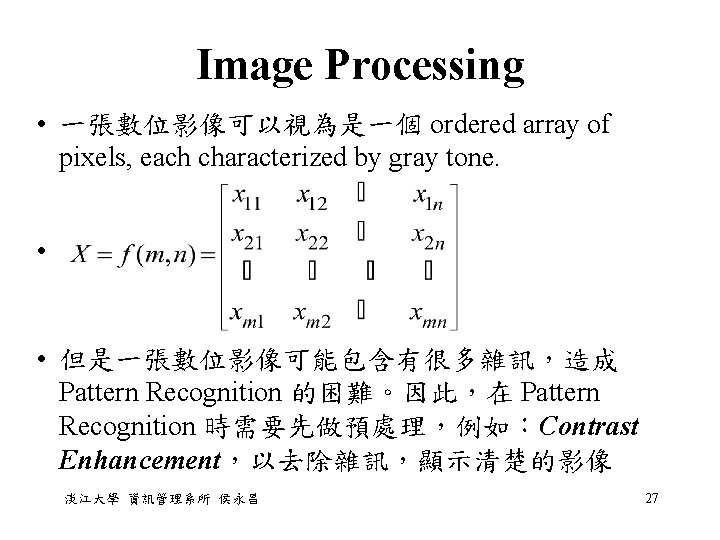
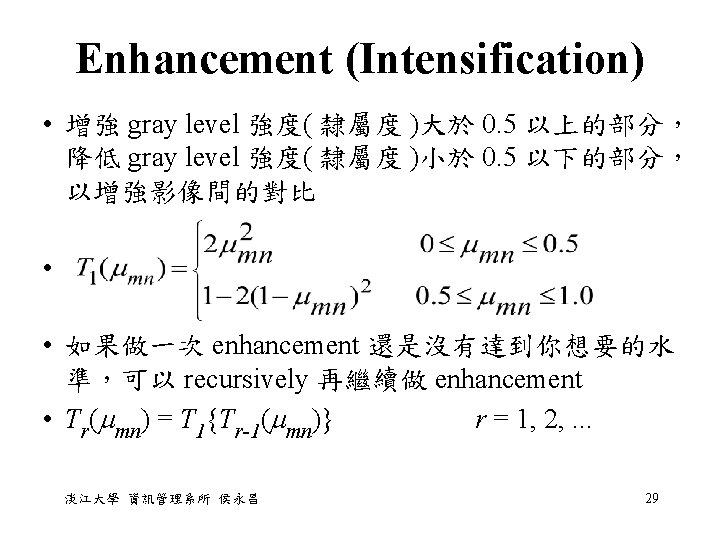
Contrast Enhancement • The greater the contrast, the greater is the distinction between gray level in an image. • High contrast image has either all black or all white regions; there is very little gray in the image. It can be thought of as crisp. • Low contrast image has lots of similar gray level in the image can be thought of as completely fuzzy. • Contrast enhancement 主要的 operation 有兩個: 1、Enhancement (Intensification) 2、Smoothing 淡江大學 資訊管理系所 侯永昌 28
Enhancement (Intensification) 淡江大學 資訊管理系所 侯永昌 30
Example 12. 7 Image Enhancement 淡江大學 資訊管理系所 侯永昌 31
Example 12. 7 Image Enhancement 淡江大學 資訊管理系所 侯永昌 32
Example 12. 7 Image Enhancement 淡江大學 資訊管理系所 侯永昌 33
Example 12. 7 Image Enhancement 淡江大學 資訊管理系所 侯永昌 34
Example 12. 7 Image Enhancement 淡江大學 資訊管理系所 侯永昌 35
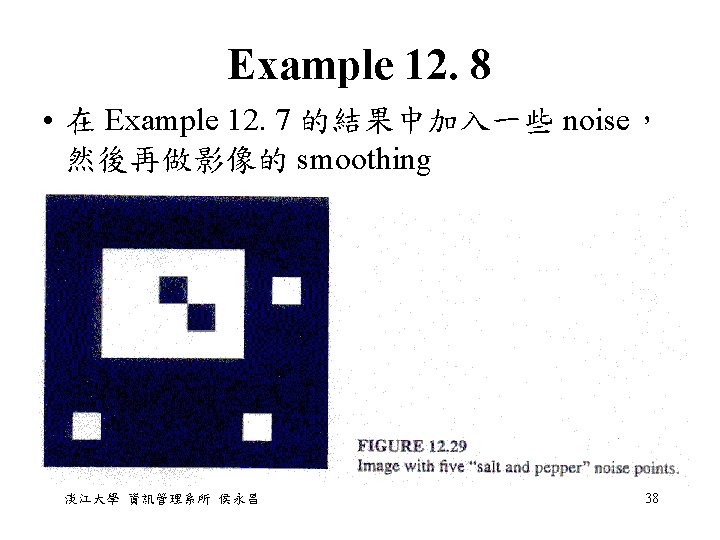
Smoothing • 相鄰的 pixel 通常應該有近似的 gray level。 因此,利用 smoothing algorithm 可以減緩 pixel 間強度的變化 • Smoothing algorithm distributes a portion of the intensity of one pixel in the image to adjacent pixels. This distribution is greatest for pixels nearest to the pixel being smoothed, and it decreases for pixels farther from the pixel being smoothed. 淡江大學 資訊管理系所 侯永昌 36
Smoothing algorithm : Defocusing • • where Qi denotes a set of Ni coordinates (i, j) that are on or within a circle of radius Ri centered at the (m, n)th point but that do not fail into Qi-1. a 0 + N 1 a 1 + N 2 a 2 +. . . + Nsas = 1 1 > a 0 > a 1 >. . > as > 0 (m, n) (i, j) • The set of coefficient ai is important in the algorithm, and specific values are problem-dependent. 淡江大學 資訊管理系所 侯永昌 37
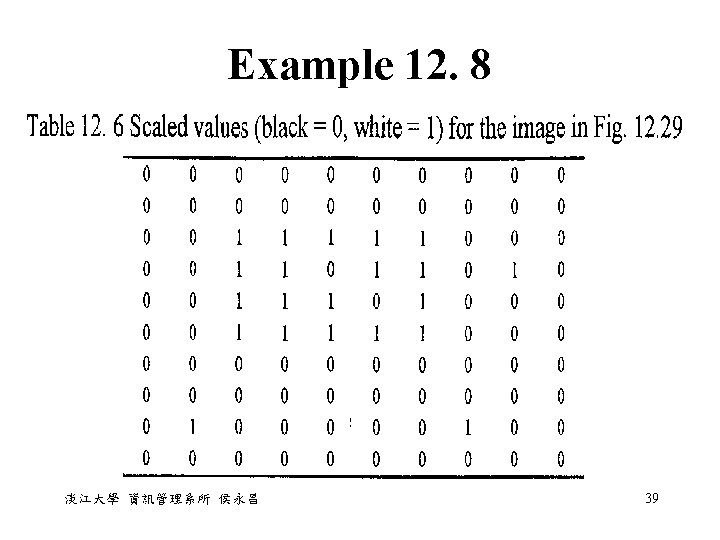
Example 12. 8 • Smoothing algorithm: 淡江大學 資訊管理系所 侯永昌 40
Chapter 13 Fuzzy Control Systems 淡江大學 資訊管理系所 侯永昌 41
Control System • Control System 一般分為兩類: 1、Open-loop control system:the control action is independent of the physical system output。例如:烤麵包機、洗衣機 2、Closed-loop control system:the control action depends on the physical system output。 例如:自動調溫器、自動飛行系統 淡江大學 資訊管理系所 侯永昌 42
Control System • The output of the physical system under control is adjusted as required by the error signal. The error signal is the difference between the actual response of the plant and the desired response (reference input). 淡江大學 資訊管理系所 侯永昌 43
Assumptions in a Fuzzy Control System Design 1、The plant is observable and controllable:State, input, and output variables are usually available for observation and measurement or computation. 2、There exists a body of knowledge comprised of a set of expert production linguistic rules, engineering common sense, intuition, a set of input/output measurements data, or an analytic model that can be fuzzified and from which rules can be extracted. 3、A solution exists. 淡江大學 資訊管理系所 侯永昌 44
Assumptions in a Fuzzy Control System Design 4、The control engineer is looking for a good enough solution, not necessarily the optimum one. 5、We will design a controller to the best of our available knowledge and within an acceptable range of precision. 6、The problems of stability and optimality are still open problems in fuzzy controller design. 淡江大學 資訊管理系所 侯永昌 45
Simple Fuzzy Logic Controllers • The steps in designing a simple fuzzy logic control system are as follows: 1、Identify the variables (inputs, states, and outputs) of the plant. 2、Partition the universe of discourse or the interval spanned by each variable into a number of fuzzy subsets, assigning each a linguistic label (subsets include all the elements in the universe). 3、Assign or determine a membership function for each fuzzy subset. 淡江大學 資訊管理系所 侯永昌 46
Simple Fuzzy Logic Controllers 4、Assign the fuzzy relationships between the inputs’ or states’ fuzzy subsets and the outputs’ subsets, thus forming the rule-base. 5、Choose appropriate scaling factors for the input and output variables in order to normalize the variables to the [0, 1] or the [-1, 1] interval. 6、Fuzzify the inputs to the controller. 7、use fuzzy approximate reasoning to infer the output contributed from each rule. 8、Aggregate the fuzzy outputs recommended by each rule. 9、Apply defuzzification to form a crisp output. 淡江大學 資訊管理系所 侯永昌 47
Simple Fuzzy Logic Controllers • In a nonadaptive simple fuzzy logic controller, the methodology used and the results of the nine steps mentioned above are fixed, whereas in the adaptive fuzzy logic controller, they are adaptively modified based on some adaptation law in order to optimize the controller. 淡江大學 資訊管理系所 侯永昌 48
Simple Fuzzy Logic Controllers 1、Fixed and uniform input- and output-scaling factors. 2、Flat, single-partition rule-base with fixed and noninteractive rules. All the rules have the same degree of certainty and confidence, equal to unity. 3、Fixed membership functions. 4、Limited number of rules, which increase exponentially with the number of inputs variables. 5、Fixed metaknowledge including the methodology for approximate reasoning, rules aggregation, and output defuzzification. 6、Low level control and no hierarchical rule structure. 淡江大學 資訊管理系所 侯永昌 49
General Fuzzy Logic Controllers 1、Fuzzification strategies and the interpretation of a fuzzification operator, or fuzzifier. 2、Knowledge base: a. Discretization/normalization of the universe of discourse b. Fuzzy partitions of input and output spaces c. Completeness of the partitions d. Choice of the membership functions of a primary fuzzy set 淡江大學 資訊管理系所 侯永昌 50
General Fuzzy Logic Controllers 3、Rule-base: a. Choice of process state (input) variables and control (output) variables b. Source of derivation of fuzzy control rules c. Type of fuzzy control rules d. Consistency, interactivity, and completeness of fuzzy control rules 淡江大學 資訊管理系所 侯永昌 51
General Fuzzy Logic Controllers 4、Decision-making logic: a. Definition of fuzzy implication b. Interpretation of the sentence connective and c. Interpretation of the sentence connective or d. Inference mechanism 5、Defuzzification strategies and the interpretation of a defuzzification operator (defuzzifier). 淡江大學 資訊管理系所 侯永昌 52
Fuzzy Control System Design 淡江大學 資訊管理系所 侯永昌 53
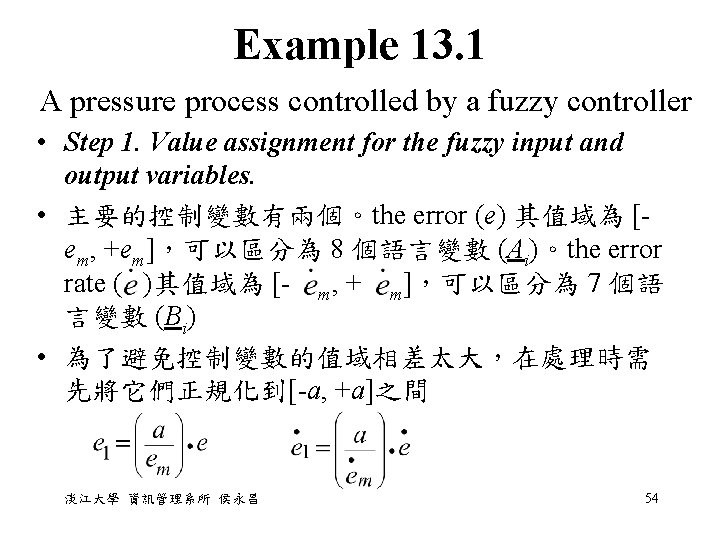
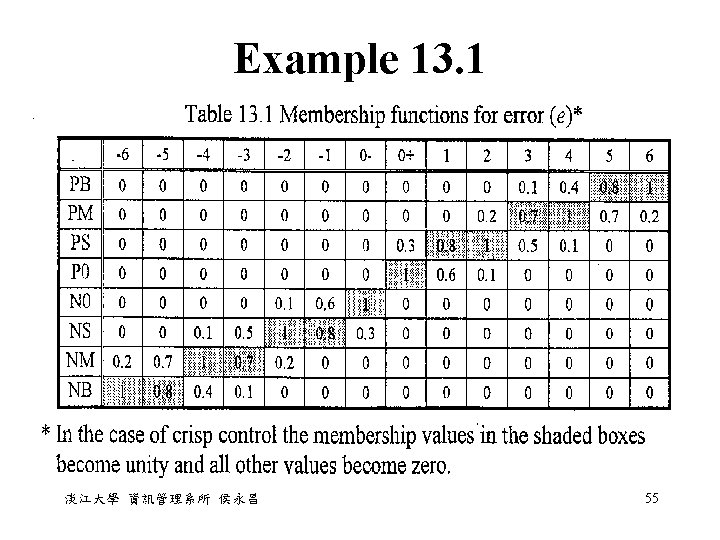
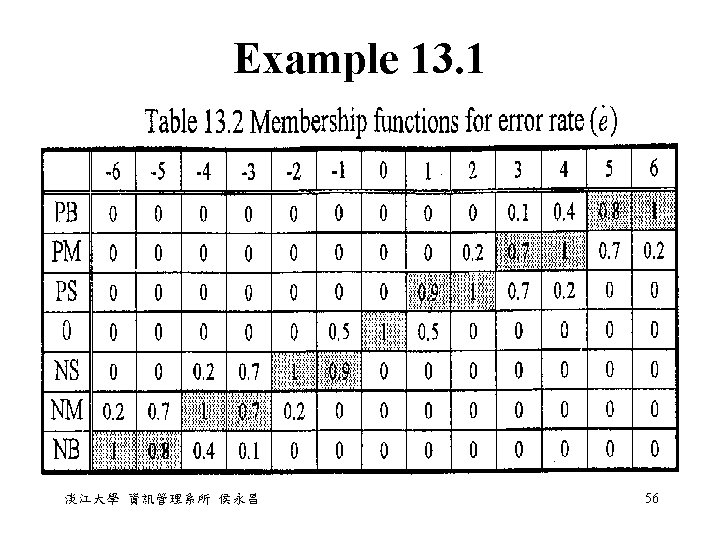
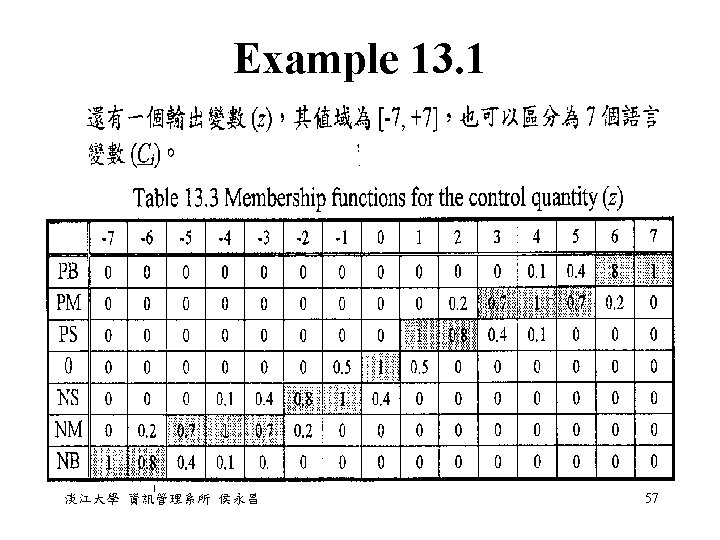
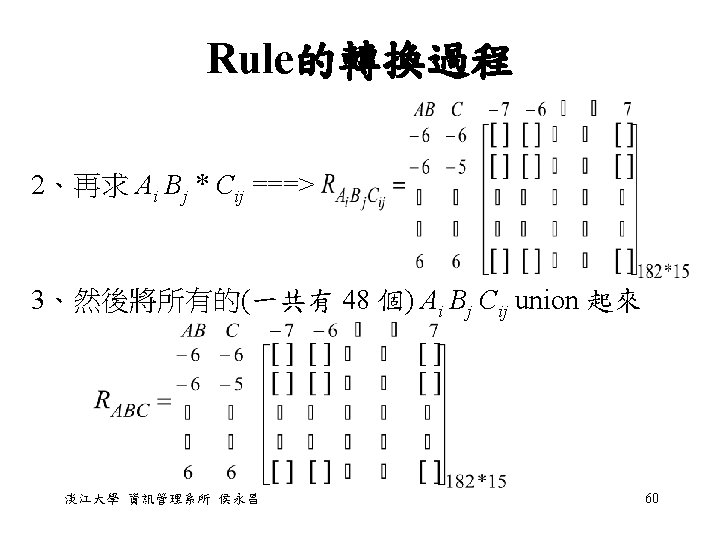
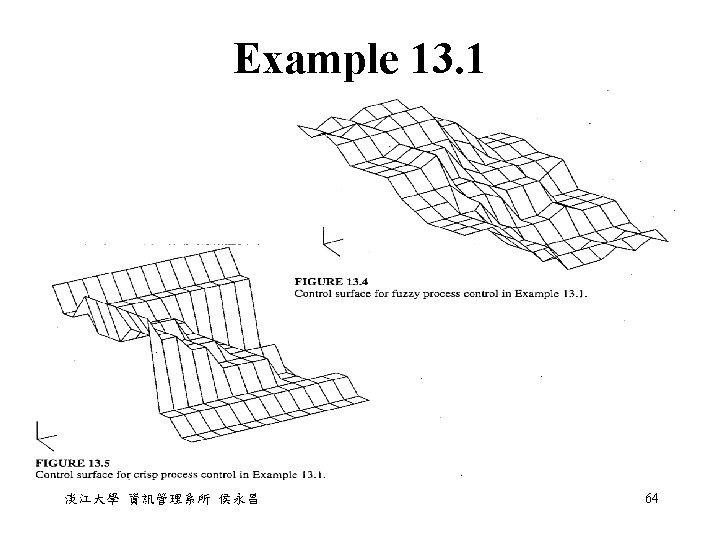
Example 13. 1 • Step 2. Summary of control rules. • 根據專家的經驗,可以得到控制的法則,其形態如 下:If e is A i and is B j , Then z is C ij • 例如:If pressure error is PB and the rate of change in the pressure error is NS, then heat input change is NM. 淡江大學 資訊管理系所 侯永昌 58
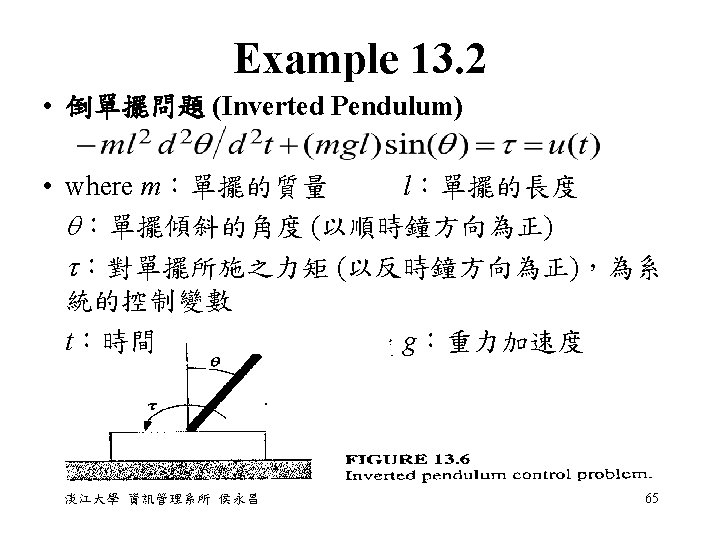
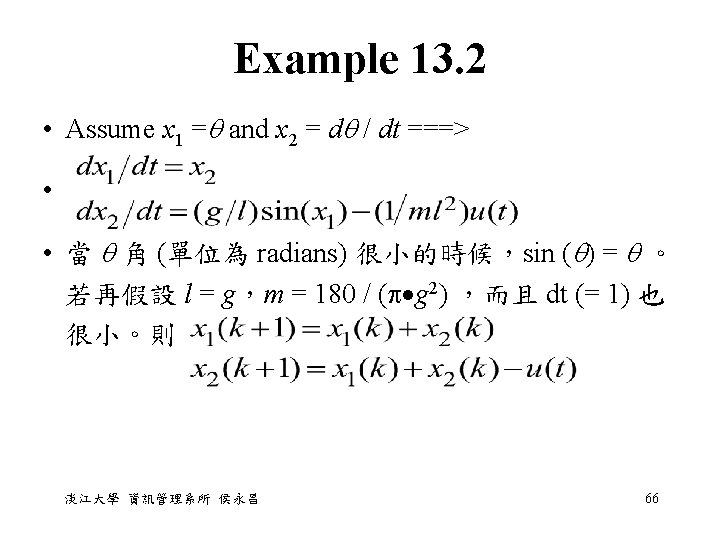
Example 13. 2 Step 1、Partition the input, output, and control space 淡江大學 資訊管理系所 侯永昌 67
Example 13. 2 Step 2、Construct inference rules for control action (u) x 1 x 2 P Z N 淡江大學 資訊管理系所 侯永昌 P PB P Z Z P Z N NB 68
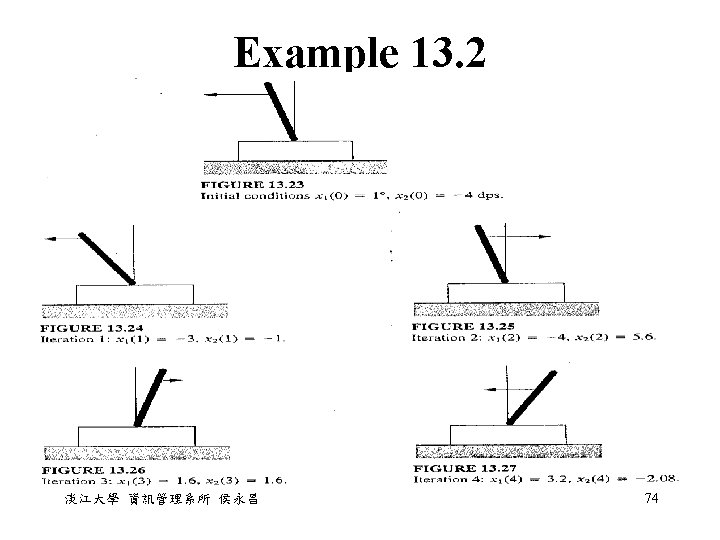
Example 13. 2 Step 3、Simulation starts with initial condition x 1(0) = 1 and x 2(0) = -4 dps • 它會啟動下列四個 rules: If (x 1 = P) and (x 2 = Z), then (u = P) If (x 1 = P) and (x 2 = N), then (u = Z) If (x 1 = Z) and (x 2 = Z), then (u = Z) If (x 1 = Z) and (x 2 = N), then (u = N) 淡江大學 資訊管理系所 侯永昌 min(0. 5, 0. 2) = 0. 2 (P) min(0. 5, 0. 8) = 0. 5 (Z) min(0. 5, 0. 2) = 0. 2 (Z) min(0. 5, 0. 8) = 0. 5 (N) 69
Example 13. 2 • At time = 3,x 1(3) = 1. 6,x 2(3) = 1. 6,它會啟動下 列四個 rules: • If (x 1 = Z) and (x 2 = P), then (u = P) If (x 1 = Z) and (x 2 = Z), then (u = Z) If (x 1 = P) and (x 2 = P), then (u = PB) (PB) If (x 1 = P) and (x 2 = Z), then (u = P) min(0. 25, 0. 3) = 0. 25 (P) min(0. 25, 0. 7) = 0. 25 (Z) min(0. 75, 0. 3) = 0. 3 min(0. 75, 0. 7) = 0. 7 (P) • 利用重心法,Defuzzify control action 得到 u(3) = 5. 28,代入微分方程式可以求得 • x 1(4) = x 1(3) + x 2(3) = 1. 6 + 1. 6 = 3. 2 x 2(4) = x 1(3) + x 2(3) - u(3) = 1. 6 + 1. 6 - (5. 28) = -2. 08 淡江大學 資訊管理系所 侯永昌 73
Example 13. 3 • Aircraft Landing Control Problem • 利用牛頓第二定律:F = m V/ t ==> V = F t/m • Assume t = 1,m = 1,===> V = F • ===> Vi+1 = Vi + Fi and Hi+1 = Hi + Vi 淡江大學 資訊管理系所 侯永昌 75
Example 13. 3 • Step 1、Partition the input, output, and control space 淡江大學 資訊管理系所 侯永昌 76
Example 13. 3 Step 2、Construct inference rules for control action (F) Height / Velocity L M S DL Z US UL DS DS Z US Zero DL DS Z US DL DL DS UL DL DL DL NZ UL UL Z DS DS Step 3、Simulate with initial condition H 0 = 1000 ft and V 0 = -20 ft/s。它會啟動下列兩個 rules: If (H = L) and (V = DL), then (F = Z) min(1. 0, 1. 0) = 1. 0 (Z) If (H = M) and (V = DL), then (F = US) min(0. 6, 1. 0) = 0. 6 (US) 淡江大學 資訊管理系所 侯永昌 77
Example 13. 3 At time = 1,H 1 = 980,V 1 = -14. 2,它會啟動下列四個 rules: If (H = L)and(V = DS), then(F = DS) min(0. 96, 0. 58) = 0. 58(DS) If (H = L) and (V = DL), then (F = Z) min(0. 96, 0. 42) = 0. 42 (Z) If (H = M) and (V = DS), then (F = Z) min(0. 64, 0. 58) = 0. 58 (Z) If (H = M)and(V = DL), then(F = US) min(0. 96, 0. 42) = 0. 42(US) • 利用重心法,Defuzzify control action 得到 F 1 = -0. 5 lbs,代入微分方程式可以求得 H 2 = H 1 + V 1 = 980 + (-14. 2) = 965. 8 ft V 2 = V 1 + F 1 = -14. 2 + (-0. 5) = -14. 7 ft/s 淡江大學 資訊管理系所 侯永昌 79
Example 13. 3 At time = 2,H 2 = 965. 8,V 2 = -14. 7,它會啟動下列四 個 rules: If (H = L)and(V = DS), then(F = DS) min(0. 93, 0. 57) = 0. 57(DS) If (H = L) and (V = DL), then (F = Z) min(0. 93, 0. 43) = 0. 43 (Z) If (H = M) and (V = DS), then (F = Z) min(0. 67, 0. 57) = 0. 57 (Z) If (H = M)and(V = DL), then(F = US) min(0. 67, 0. 43) = 0. 43(US) • 利用重心法,Defuzzify control action 得到 F 2 = -0. 4 lbs,代入微分方程式可以求得 H 3 = H 2 + V 2 = 965. 8 + (-14. 7) = 951. 1 ft V 3 = V 2 + F 2 = -14. 7 + (-0. 4) = -15. 1 ft/s 淡江大學 資訊管理系所 侯永昌 80
Example 13. 3 At time = 3,H 3 = 951. 1,V 3 = -15. 1,它會啟動下列四 個 rules: If (H = L)and(V = DS), then(F = DS) min(0. 9, 0. 49) = 0. 49 (DS) If (H = L) and (V = DL), then (F = Z) min(0. 9, 0. 51) = 0. 51 (Z) If (H = M) and (V = DS), then (F = Z) min(0. 7, 0. 49) = 0. 49 (Z) If (H = M)and(V = DL), then(F = US) min(0. 7, 0. 51) = 0. 51 (US) • 利用重心法,Defuzzify control action 得到 F 3 = 0. 3 lbs,代入微分方程式可以求得 H 4 = H 3 + V 3 = 951. 1 + (-15. 1) = 936. 0 ft V 4 = V 3 + F 3 = -15. 1 + 0. 3 = -14. 8 ft/s 淡江大學 資訊管理系所 侯永昌 81
Industrial Applications • In Japan, Fuzzy logic has become a common advertising slogan. • Whereas the Eastern world equates the word fuzzy with a form of computer intelligence, the Western world still largely associates the world derisively within the context of imprecise or approximate science. • Appliances with fuzzy logic controllers provides the consumer with optimum settings that more closely approximate human perceptions and reactions than those associated with standard control systems. 淡江大學 資訊管理系所 侯永昌 82
Industrial Applications • Fuzzy Logic Control of Blood Pressure during Anesthesia – 量測麻醉劑量與血壓之間的關係。 • Fuzzy Logic Applications to Image-Processing Equipment (1) Autofocus mechanism for a 35 mm camera 找到空間中的主體來訂定相機的焦距 (2) Image stabilization Controller for a Camcorder 減少因為手的顫抖所造成的影像模糊 (3) 電視的 contrast, brightness, velocity modulation, 和 sharpness 的調整 淡江大學 資訊管理系所 侯永昌 83
Industrial Applications • Consumer Adaptive Fuzzy Control of Home Heating System 利用 current energy consumption, medium-term tendency, short-term tendency, 和 yesterday‘s average energy consumption 來控制壁爐的燃料量 淡江大學 資訊管理系所 侯永昌 84