ELEKTRINE MAINE OBNAVLJANJE Elektrine maine generatori i motori
 su uređaji koji transformišu mehaničku")
ELEKTRIČNE MAŠINE OBNAVLJANJE… - Električne mašine (generatori i motori) su uređaji koji transformišu mehaničku energiju u električnu, i obrnuto. - Prema vrsti kretanja pokretnog dela, mogu biti obrtne ili linearne. - Rad električnih mašina zasniva se na četiri osnovna principa (delovanja): 1. Elektromagnetno delovanje üStruja koja protiče kroz provodnik izaziva magnetno polje, koje ga okružuje – Bio -Savarov zakon. üUticaj polja na druge provodnike sa strujom i magnete unutar regiona njegovog dejstva - Lorencova i Amperova sila. üKada se promeni smer struje, menja se i smer polja. üPolje se u električnim mašinama usmerava i njegova jačina povećava (i do nekoliko hiljada puta) prolaskom kroz feromagnetno jezgro. üSamoinduktivnost namotaja (kalema) je mera koliko se magnetnog fluksa proizvede po jedinici struje (L=Ψ/I). üUkoliko magnetno polje zamišljamo pomoću magnetnih linija sila koje se šire u prostoru, tada je fluks broj linija koji prolazi kroz neku zatvorenu konturu.

ELEKTRIČNE MAŠINE UVOD 2. Motorno delovanje Na provodnik sa strujom, koji se nalazi u magnetnom polju (koje je proizvedeno drugim strujama ili stalnim magnetom), deluje mehanička sila, normalna i na pravac struje i na pravac polja. Sila menja smer ako se promeni ili smer struje ili smer polja. Sila je proporcionalna jačini struje, jačini polja i dužini provodnika: F=(Ix. B)l. U praksi, provodnici se smeštaju u žlebove da bi se sprečilo njihovo smicanje i da bi se oni čvršće fiksirali za masu rotora, na koji moment treba da se prenese. Time je postignuto: 1. Namotaji više ne mogu da se smaknu 2. Smanjen je vazdušni procep, manja magnetska otpornost, a to znači da je za isti fluks manja mps ( =F/R ) 3. Fluks pretežno prolazi kroz zupce, a ne kroz žlebove, pa je smanjena magnetna indukcija i sila na provodnike koja je sa njom srazmerna. Dakle, međusobno dejstvo dva polja od kojih jedno potiče od induktora a drugo od indukta, izaziva elektromagnetsku silu na zupce, dok je sila na provodnike zanemarljiva.

ELEKTRIČNE MAŠINE UVOD Greška je tumačiti stvaranje momenta mašine preko Lorencove sile, već stvaranje momenta treba posmatrati kao međusobno dejstvo dva elektromagneta, kao privlačenje raznoimenih i odbijanje istoimenih polova. Dakle, međusobno dejstvo dva polja, jednog koje potiče od induktora, a drugog od indukta izaziva elektromagnetnu silu na zupce, dok je sila na provodnike zanemarljiva. 3. Generatorsko delovanje ü U električnom provodniku koji se kreće u magnetnom polju indukuje se napon, što se izražava preko indukovane ektromotorne sile (ems). üEfekat indukovanja je maksimalan kad su provodnik, kretanje i polje međusobno normalni: E=(vx. B)l). ü U svim električnim mašinama, bez obzira da li rade kao generatori ili motori, u većini radnih režima, namotaji rotora se kreću i kroz njih protiče struja. Stoga su generatorsko i motorno delovanje nerazdvojivi i javljaju se istovremeno.
 koja protiče")
ELEKTRIČNE MAŠINE UVOD 4. Transformatorsko delovanje üPromenljiva struja (i naizmenična i impulsna) koja protiče kroz namotaj (kalem) stvara magnetno polje čiji se polaritet i amplituda menjaju u vremenu. üTakvo magnetno polje indukuje napon (ems) u svakom namotaju koji obuhvati. Amplituda indukovane ems zavisi od međusobne induktivnosti između namotaja i brzine promene struje namotaja koji proizvodi magnetno polje.

MOTOR JEDNOSMERNE STRUJE Poprečni presek jednosmernog motora: if GP f q – osa ili KN poprečna osa ia S d – osa ili uzdužna osa me, PP ia R f GP f PP a if KN if Osnovni delovi: S – stator R – rotor GP – glavni polovi PP – pomoćni polovi KN – kompenzacioni namotaj.

Osnovni delovi motora jednosmerne struje A – Poklopac B – Kućište C – Ležaj D – Rotor (armatura) E – Držač četkice F – Priključna kutija G – Izolacija H – Poklopac na komutatorskom kraju (za montažu dodatne opreme) I – Oslonac za podizanje J - Namotaj

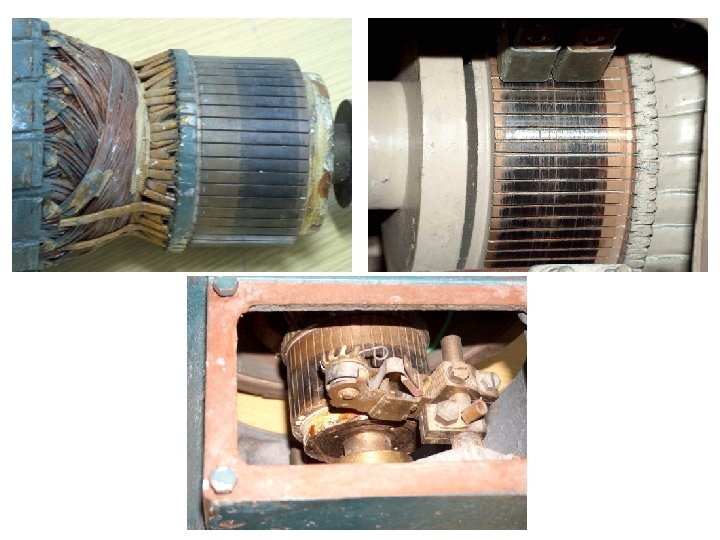
Slike motora jednosmerne struje 1. Mehanička spojnica 2. Rotorska zvezda 3. Limovi rotora 4. Poprečne veze rotora 5. Glavni pol 6. Namotaj glavnog pola 7. Pokretni spoljni poklopac 8. Kućište 9. Kompenzacioni namotaj 10. Držači četkica na kućištu 11. Namotaj rotora 12. Spoj namotaja rotora sa kolektorom 13. Držač četkica 14. Četkice 15. Kolektorska kriška 16. Držač kriški 17. Vratilo 18. Ležaj 19. Ležište ležaja 20. Prstenovi za podmazivanje 21. Rezervoar ulja 22. Postolje 23. Noseća ploča

1. Četkice 2. Opruge četkica 3. Ležaj na komutatorskom kraju 4. Ležaj na pogonskom kraju 5. Rotor (armatura) 6. Pomoćni pol sa namotajem 7. Glavni pol i njegov namotaj 8. Držač ležišta (komutatorski kraj) 9. Zaštitni poklopac 10. Konzola četkice 11. Ventilator na rotoru 12. Držač ležišta (pogonski kraj) 13. Kućište namotaja statora komutatorski kraj pogonski kraj

Slike motora jednosmerne struje




MOTOR JEDNOSMERNE STRUJE primena - MJS su dominirali u oblasti primene pogona sa promenljivom brzinom preko jednog veka, a i danas predstavljaju vrlo čest izbor ako se zahteva rad regulisanog elektromotornog pogona u vrlo širokom opsegu brzina. To je posledica njihovih odličnih radnih karakteristika i karakteristika upravljanja. -Jedna njihova bitna mana je mehanički komutator, koji predstavlja ograničenje u pogledu snage i brzine motora, utiče na povećanje inercije i aksijalne dužine i zahteva periodično održavanje. - Drugi ozbiljan problem, koji nastaje zbog prirode konstrukcije MJS, je hlađenje. Praktično sva električna snaga prolazi kroz namotaj rotora, te i većina gubitaka nastaje u rotoru. Motori zatvorene konstrukcije se hlade prisilnom ventilacijom spoljnog oklopa, a prenos toplotne energije sa rotora na stator se rešava unutrašnjim ventilatorom. Kako se ovim načinom toplotna energija teže odvodi iz rotora, ne može se postići povoljna snaga motora za datu veličinu motora. Ako se motor hladi direktnom prisilnom ventilacijom kroz vazdušni procep, mora biti otvorenije konstrukcije pa vlaga, prašina i razne ostale materije mogu dospeti u motor i izazvati probleme, pogotovo na četkicama i u ležajevima. - Kod motora za naizmeničnu struju koji se napajaju iz frekventnih energetskih pretvarača, eliminisan je komutator po cenu složenijeg upravljanja (dok se nisu dovoljno razvile i dok nije dovoljno pala cena komponenti energetske elektronike, nisu mogle motori za NS da zamene MJS).

MOTOR JEDNOSMERNE STRUJE SA STALNIM MAGNETOM - Pobudni namotaj statora može se zameniti stalnim magnetima, koji obezbeđuju magnetisanje celog magnetnog kola. -Klasični feritni i Al-Ni-Co magneti daju srednju jačinu magnetnog polja i već decenijama se koriste u manjim motorima. - U poslednjih dve decenije, nova tehnologija magneta od tzv. retkih zemalja (Samarijum-Cobalt i Neodijum-Bor-Fe), omogućila je dostizanje većih jačina magnetnog polja i vrlo visoke gustine magnetne energije. Ovi magneti su stoga manji po zapremini pa je cena ugradnje prihvatljiva. Prednost ovih magneta je što je nepoželjno razmagnetisavanje, koje se može javiti pri startu i pri kvarovima, praktično nemoguće. Loša strana primene je visoka cena magneta, ali zbog postizanja jačeg magnetnog polja ceo motor postaje manji (za istu snagu), što ublažava porast cene. - Stalni magneti su pogodni za motore malih snaga, gde je izrada i ugradnja malih pobudnih namotaja komplikovana i relativno skupa. Moderni magneti su idealni za servo-motore, gde su neophodne visoke dinamičke performanse: - otpor i induktivnost rotora su vrlo mali pa se omogućujavaju vrlo brze promene struje tj. momenta. - smanjene dimenzije rotora, pogotovo pri specijalnim konstrukcijama rotora, omogućuje izradu mašina sa izuzetno malim momentom inercije, što doprinosi postizanju visokih ubrzanja i usporenja. -mehaničke karakteristike motora sa stalnim magnetime slične su karakteristikama motora sa nezavisnom pobudom.
 su vrlo rasprostranjene. Često se")
MOTOR JEDNOSMERNE STRUJE primena - Mašine jednosmerne struje (MJS) su vrlo rasprostranjene. Često se koriste za elektromotorne pogone promenljive brzine, zbog vrlo jednostavne regulacije brzine. Iako su druge vrste motora u poslednjih par decenija postale ozbiljan konkurent za upotrebu u pogonima promenljive brzine, MJS se i dalje koriste u sledećim oblastima: a) mali napon: automobili i ostala drumska vozila (anlaser, brisači, ventilacija kabine, podizači prozora, pomeranje sedišta), uređaji kućne elektronike i zabave (DVD i CD plejeri, računari), igračke. b) srednji i viši napon: električna vuča (trolejbusi, tramvaji, vozovi, viljuškari i unutrašnji transport). c) 1. Motori za valjaoničke pogone: u industriji čelika i aluminijuma. Obično rade na malim brzinama i konstruisani su da rade sa konstantnim momentom u širokom opsegu brzina (4: 1). 2. Dizalični pogoni u rudnicima (podzemni kopovi) za transport ruda i ljudi na površinu. 3. Motori u teškoj industriji, za velike snage (industrial duty motors) – pogoni ventilatora, miksera, ekstrudera i drugi pogoni koji zahtevaju veliki momenat ili promenljivu brzinu. 4. Motori za pogon brodova (heavy duty motors, ali obezbeđuju super tihi rad): ledolomaca, podmornica, tegljači, remorkeri, . . .

5. Motori za specijalne namene: dinamički simulator letenja, mašine za proveru centriranosti rotacionih delova drugih mašina, dinamometri. . . Svuda gde se traži veliki momenat, veliko ubrzanje i mala ili promenljiva brzina. - Vodeći proizvođači: ABB, Siemens, TECO-Westinghouse, General Electric, Baldor (memeber of ABB group) (npr. General Electric (GE): Proizvodi DC motore u rasponu snaga od 0. 75 k. W do 2250 k. W (pa čak i 26000 k. W), u kućištima koji pružaju mogućnost zaštite od kapanja, curenja i prskanja vode, potpuno oklopljeni motori za korišćenje u eksplozivnim sredinama). Osobine: - pogodne mehaničke karakteristike - jednostavno upravljanje - složena konstrukcija (komutator) - potrebno periodično održavanje - mala preopteretljivost (kompenzacioni namotaj) - ograničena maksimalna brzina.

POGON SA MOTOROM JEDNOSMERNE STRUJE NEZAVISNA POBUDA Uprošćena, principijelna šema: Ra La + uf if Rf Lf Nf ia e f + me, I M mm
 motor jednosmerne struje")
Motor, reduktor, opterećenje. reduktor opterećenje (valjak) motor jednosmerne struje
 (2) (3) (4)")
Matematički model, sistem jednačina: diferencijalne jednačine: (1) (2) (3) (4)

Konvertor za čelik – objašnjenje zavisnosti momenta opterećenja od pozicije + 900 0 − 900 I M

Konvertor za čelik – objašnjenje zavisnosti momenta opterećenja od pozicije

algebarske jednačine: - ukupan fluks Karakteristika magnećenja - kada je mašina nezasićena

Karakteristika magnećenja f f fb Lf ifb if

NORMALIZACIJA - uprošćenje jednačina; - eliminacija dimenzija svih veličina osim vremena; - svođenje vrednosti svih veličina na isti nivo nezavisno od snage motora. A: N: A: - apsolutni domen; N: - normalizovani domen. A:

Postupak normalizacije: indeksi: - * normalizovana vrednost veličine x; - b bazna vrednost za veličinu x. Napomena: Indeks "*" se može izostaviti ako su sve veličine u izrazu normalizovane, ali se tada to mora naglasiti sa oznakom "N: ". U mešovitim izrazima indeks "*" je obavezan. A: Jednačine i izrazi u apsolutnom domenu. N: Jednačine i izrazi u normalizovanom domenu.
: izvedene:")
Bazne vrednosti osnovne (usvojene): izvedene:
 / !!!!! Ta - elektromagnetna vremenska konstanta indukta.")
NORMALIZACIJA MATEMATIČKOG MODELA POGONA Jednačina (1) / !!!!! Ta - elektromagnetna vremenska konstanta indukta.
 / !!!!! Kada je mašina nezasićena: Tf – elektromagnetna vremenska konstanta induktora.")
Jednačina (2) / !!!!! Kada je mašina nezasićena: Tf – elektromagnetna vremenska konstanta induktora.
 / Tm – mehanička vremenska konstanta pogona.")
Jednačina (3) / Tm – mehanička vremenska konstanta pogona.
 / b Priroda veličine (položaj) dozvoljava proizvoljno biranje njene bazne vrednosti. Za")
Jednačina (4) / b Priroda veličine (položaj) dozvoljava proizvoljno biranje njene bazne vrednosti. Za izabrano: dobija se:

STATIKA
, (2) i (3) u")
STATIČKE KARAKTERISTIKE POGONA SA NEZAVISNO POBUĐENIM JEDNOSMERNIM MOTOROM Jednačine (1), (2) i (3) u stacionarnom stanju: A: Iz jednačine (4) u stacionarnom stanju sledi: = 0 !! Specijalni slučaj!!!

U normalizovanom domenu: N:

U nominalnom režimu: N: ua nom = 1; ia nom = 1; nom = 1. Iz jednačine (1) se dobija: Ranom - sopstveni otpor indukta. U praksi je: A: Kod manjih motora je Ra nom* veće, a kod većih motora je manje.

Sada se može napisati: N: ali < 1 !!! Takođe važi:

Iz jednačina koje važe u stacionarnom stanju dobijaju se analitički izrazi za statičke karakteristike motora - pogona. N: 0 – brzina idealnog praznog hoda – promena brzine usled opterećenja Takodje, dobija se i MEHANIČKA KARAKTERISTIKA:

UTICAJ DODATOG OTPORA U KOLU INDUKTA NA STATIČKE KARAKTERISTIKE N: Odnos promena brzine usled opterećenja:
 brzina motora zavisi od vrednosti dodatog otpora:")
Za određeno opterećenje (mm) brzina motora zavisi od vrednosti dodatog otpora:

o Potencijalna karakteristika opterećenja mm mm mm

o Reaktivna karakteristika opterećenja mm mm

UTICAJ PROMENE NAPONA INDUKTA NA OBLIK STATIČKIH KARAKTERISTIKA Pri konstantnoj pobudi motora ( f = const) statičke karakteristike: = i (ia) i = m (m'm) Važne napomene: 1. u praksi je -1< ua < 1; 2. u praksi je f = f nom ; 3. posmatra se opseg promene opterećenja u kome magnetna reakcija indukta ne dolazi do izražaja (do m'mmax). Ovaj opseg određen je maksimalno dozvoljenom strujom motora (komutacijom) koja je u praksi ia max (1, 5 ÷ 2, 5). Prema tome:

N N 1 1 ia 1 mm <1

UTICAJ PROMENE POBUDE NA OBLIK STATIČKIH KARAKTERISTIKA Pri konstantnom naponu indukta (ua = ua nom = const. ) karakteristične vrednosti na mehaničkoj karakteristici su: N: brzina idealnog praznog hoda momenat kratkog spoja Napomena: Ova vrednost momenta kratkog spoja je fiktivna, stvarna vrednost momenta kratkog spoja je znatno manja zbog uticaja magnetne reakcije indukta.

o Promena statičkih karakteristika prilikom smanjenja fluksa. mk mm

Promena statičkih karakteristika prilikom smanjenja fluksa.
 dobija")
Kod promene pobude, maksimalni moment je funkcija fluksa: smenom u i (ii ) dobija se: HIPERBOLA!!!!! Maksimalna dozvoljena struja određuje oblast rada. Za trajni rad u oblasti slabljenja polja, mora se voditi računa o zagrevanju mašine. U trajnom radu trebalo bi da struja indukta bude manja ili jednaka nominalnoj.

Promene statičke karakteristike prilikom smanjenja fluksa. Kriva konstantne snage.

Polazeći od statičke karakteristike uz uslov: Promenu brzine u funkciji promene fluksa dobićemo rešavanjem jednačine: Zamenom rešenja u statičku karakteristiku, dobijamo maksimalnu brzinu pri smanjenju pobude HIPERBOLA - OBVOJNICA !!!! Mehanička snaga je tada maksimalna :

Zbog konstruktivnih razloga brzina motora je ograničena: Pa dobijamo: Praktično ima smisla samo smanjivati fluks:

Crna linija Granica mogućih radnih tačaka. Žuta linija Granica teorijski mogućih radnih tačaka. ♦● ♦ Momenti na maksimalnoj brzini Nominalna radna tačka
 N: ua f fnom ua e")
KOMBINOVANO UPRAVLJANJE (PROMENOM NAPONA INDUKTA I PREKO POBUDE) N: ua f fnom ua e ≈ const.
 RAVNI. N: A 1 A B 1")
PODRUČJE MOGUĆIH RADNIH TAČAKA U (mm; ) RAVNI. N: A 1 A B 1 C 1 ua=1; f = fnom ua = 0 B ua=-1; f = fnom D 1 C D E 1 E } } } 0< ua <1 f = fnom } ua= -1 f < fnom ua=1 f < fnom mm 0> ua >-1 f = fnom
 RAVNI NA PRIMERU.")
KOORDINATE KARAKTERISTIČNIH TAČAKA U PODRUČJU MOGUĆIH RADNIH TAČAKA U (mm; ) RAVNI NA PRIMERU. A: A 1 : B 1 :
 RAVNI NA PRIMERU.")
KOORDINATE KARAKTERISTIČNIH TAČAKA U PODRUČJU MOGUĆIH RADNIH TAČAKA U (mm; ) RAVNI NA PRIMERU. C: C 1 : D 1 : E: E 1:
- Slides: 55