Geometric Intuition Randy Gaul Talk Outline Vectors Points





 • Lets define an implied point O – O represents")
 – Geometrically the x, y")
 • Given 3 scalars i, j and k, any point in")

 • V can be written as a linear combination of E")


 • Rotation matrices consist of an x, y and z axis")
 • Multiplying a rotation and a vector rotates the vector •")



")



 • a, b and c form a vector, called the normal •")
")

 x plane P y")



")
")
")
")
















 • The 1 is important, it means it is a point •")
 • Proof that translation doesn’t affect vectors: – Translate from P to")


")

 • Won’t work when player tries to look straight")

- Slides: 58
Geometric Intuition Randy Gaul
Talk Outline • • • Vectors, Points and Basis Matrices Rotation Matrices Dot product and how it’s useful Cross product and how it’s useful Extras
Prerequisites • • • Matrix multiplication How to apply dot/cross product Vector normalization Basic understanding of sin/cos Basic idea of what a plane is
Vectors • Formal definition – Input or output from a function of vector algebra • Informal definition – Scalar components representing a direction and magnitude (length) – Vectors have no “location”
Points and Vectors • A point P and Q is related to the vector V by: – P – Q = V • This implies that points can be translated by adding vectors
Points and Vectors (2) • Lets define an implied point O – O represents the origin • Any point P can be expressed with a vector V: – P = O + V • Vectors point to points, when relative to the origin!
Euclidean Basis • Standard Euclidean Basis (called E 3) – Geometrically the x, y and z axes
Euclidean Basis (2) • Given 3 scalars i, j and k, any point in E 3 can be represented
Linear Combination • Suppose we have a vector V – Consists of 3 scalar values – Below V written in “shorthand” notation
Linear Combination (2) • V can be written as a linear combination of E 3 – This is the “longhand” notation of a vector
Basis Matrices • E 3 is a basis matrix – Many matrices can represent a basis • Any vector can be represented in any basis Note: Different i, j and k values are used on left and right http: //en. wikipedia. org/wiki/Change_of_basis
Rotation Matrices • A rotation matrix can rotate vectors – Constructed from 3 orthogonal unit vectors – Can be called an “orthonormal basis” • E 3 is a rotation matrix!
Rotation Matrices (2) • Rotation matrices consist of an x, y and z axis – Each axis is a vector X y z
Rotation Matrices (3) • Multiplying a rotation and a vector rotates the vector • This is a linear combination
Dot Product • Comes from law of cosines • Full derivation here • For two vectors u and v:
Shortest Angle Between 2 Vectors • Assume u and v are of unit length • Result in range of 0, 1 • No trig functions required
How Far in a Given Direction? • Given point P and vector V – How far along the V direction is P? x P V y
How Far in a Given Direction? (2)
Planes • Here’s the 3 D plane equation
Planes • Here’s the 3 D plane equation • WAIT A SECOND
Planes • Here’s the 3 D plane equation • WAIT A SECOND • THAT’S THE DOT PRODUCT
Planes (2) • a, b and c form a vector, called the normal • d is magnitude of the vector – Represents distance of plane from origin
Planes (3)
Planes and the Dot Product
Planes and the Dot Product (2) x plane P y
Signed Distance P to Plane
Project P onto Plane x plane P y
Rotation Matrices and Dot Product • Given matrices A and B • A * B is to dot the rows of A with columns of B • Lets assume A and B are rotation matrices http: //en. wikipedia. org/wiki/Matrix_multiplication
Rotation Matrices and Dot Product (2)
Rotation Matrices and Dot Product (3)
Rotation Matrices and Dot Product (4)
Rotation Matrices and Dot Product (5)
Point in Convex Hull • Test if point is inside of a hull – Compute plane equation of hull faces – Compute distance from plane with plane equation – If all distances are negative, point in hull – If any distance is positive, point outside hull • Works in any dimension • Can by used for basic frustum culling
Point in OBB • An OBB is a convex hull! – Hold your horses here… • Lets rotate point P into the frame of the OBB – OBB is defined with a rotation matrix, so invert it and multiply P by it – P is now in the basis of the OBB • The problem is now point in AABB
Point in Cylinder • Rotate cylinder axis to the z axis • Ignoring the z axis, cylinder is a circle on the xy plane • Test point in circle in 2 D – If miss, exit no intersection • Get points A and B. A is at top of cylinder, B at bottom • See if point’s z component is less than A’s and greater than B’s – Return intersection • No intersection
Bumper Car Damage? • Two bumper cars hit each other • One car takes damage • How much damage is dealt, and to whom?
Bumper Car Damage Answer • Take vector from one car to another, T • Damage dealt: – 1. 0 - Abs( Dot( velocity, T ) * collision. Damage )
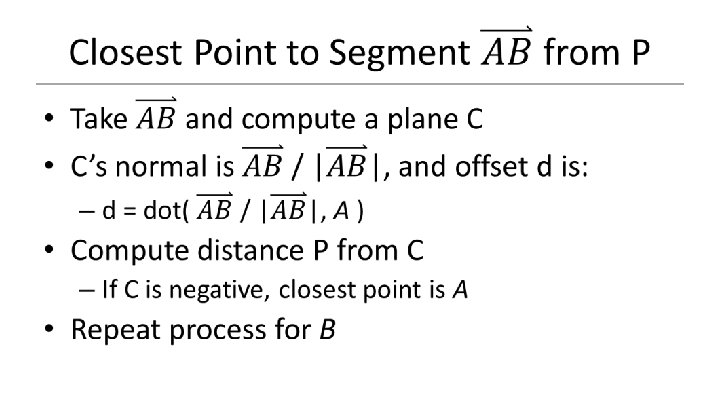
http: //www. ra ndygaul. net/20 14/07/23/dista nce-point-toline-segment/
Visualization in 2 D P C
Cross Product • Operation between vectors • Produces a vector orthogonal to both input vectors
Cross Product Handedness http: //en. wikipedia. org/wiki/Cross_product
Cross Product Details http: //upload. wikimedia. org/wikipedia/commons/thumb/6/6 e/Cross_product. gif/2 20 px-Cross_product. gif
Plane Equation from 3 Points • • Given three points A, B and C Calculate normal with: Cross( C – A, B – A ) Normalize normal Compute offset d: dot( normal, A (or B or C) )
• Compute distance A to Plane: da • Compute distance B to Plane: db • If da * db < 0 – Intersection = A + (da / (da – db)) * (B – A) • Else – No intersection
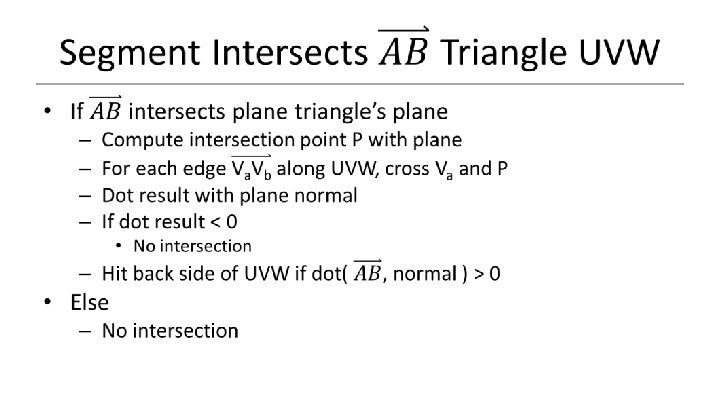
normal P
Affine Transformations • Given matrix A, point x and vector b • An affine transformation is of the form: – Ax + b
Affine Transformations • Given 3 x 3 matrix A, point x and vector b • An affine transformation is of the form: – Ax + b • With a 4 x 4 matrix we can represent Ax + b in block formation:
Translation • Construct an affine transformation such that when multiplied with a point, translates the point by the vector b • I is the identity matrix, and means no rotation (or scaling) occurs
Translation (2) • The 1 is important, it means it is a point • If we had a zero here b wouldn’t affect x
Translation (3) • Proof that translation doesn’t affect vectors: – Translate from P to Q by T • • P – Q = T = (P + T) – (Q + T) = (P – Q) + (T – T) = P – Q
Rotation • Orthonormal basis into the top left of an affine transformation, without any translation vector:
Scaling • • • Given scaling vector S Take the matrix A Scale A’s x axis’ x component by S 0 Scale A’s y axis’ y component by S 1 Scale A’s z axis’ z component by S 2
Scaling (2)
Camera - Look. At
Camera – Look. At (2) • Won’t work when player tries to look straight up or down – Parallel vectors crossed result in the zero vector • Possible solutions: – Snap player’s view away from up/down – Use an if statement and cross with a different up vector – More solutions exist!
Barycentric Coordinates • Slightly out of scope of this presentation • See Erin Catto’s GDC 2010 lecture • Idea: – Like a linear combination, try affine combinations of points • Useful for: – Voronoi region identification, collision detection, certain graphics or shader effects