Mechanics of Machinery 430201 Engineering Statics 425203 Engineering



 n ����� 2 Kinematics Fundamentals o Links, Joints")



 DOF of rigid body in Space DOF of")
 o DOF of Rigid body in Plane")

������ ( Reference line")



 Revolute (R) Prismatic (P) Screw or Helical (H) Cylindric (C)")
 : Rotating full pin joint")
 : Translating full slider joint")
 : Spherical (S) : o")
 : o Linkage & Plane (Force close)")








- Slides: 60
Mechanics of Machinery 430201 Engineering Statics 425203 Engineering Dynamics 425306 Mechanics of Machinery 425312 Mechanical System Design
Mechanics of Machinery o ��������� Norton, R. L. , “Design of Machinery”, 3 rd Edition, Mc-Graw Hill, 2004 o ������� David, H. M. , “Machines & Mechanisms”, 3 rd Edition, Prentice Hall, 2005
Outline o ������� ���� n ����� 1 Introduction o Kinematics and kinetics o Mechanism and Machine n ����� 2 Kinematics Fundamentals o Degree of freedom and mobility o Type of motion
Outline o Introduction of Mechanisms (1) n ����� 2 Kinematics Fundamentals o Links, Joints and Kinematics Chains o Linkage
Machine
Mechanism
Mobility ���� Degree of Freedom (DOF) DOF of rigid body in Space DOF of Rigid body in Plane
Mobility ���� Degree of Freedom (DOF) o DOF of Rigid body in Plane
Type of Motion o o Rotation ����������� Translation ����������� Planar Motion
Type of Motion o Pure Rotation : �������� Reference Frame )������ ( Reference line ������ angular orientation Reference line
Type of Motion o Pure Translation : ������� path ����� Reference line ������ linear position )�������� )
Type of Motion o Complex Motion : Rotation + Translation system component ����� 2 -D Coordination ���� Planar Motion (x, y) ���� Translation ( ) ���� Rotation component
Joint ���� Kinematics pairs o o ����� : �������� link 2 links ������ (��� node ��� link) ���������� Link ������� Joint ������ o Lower pair : surface contact o Higher pair : point or line contact
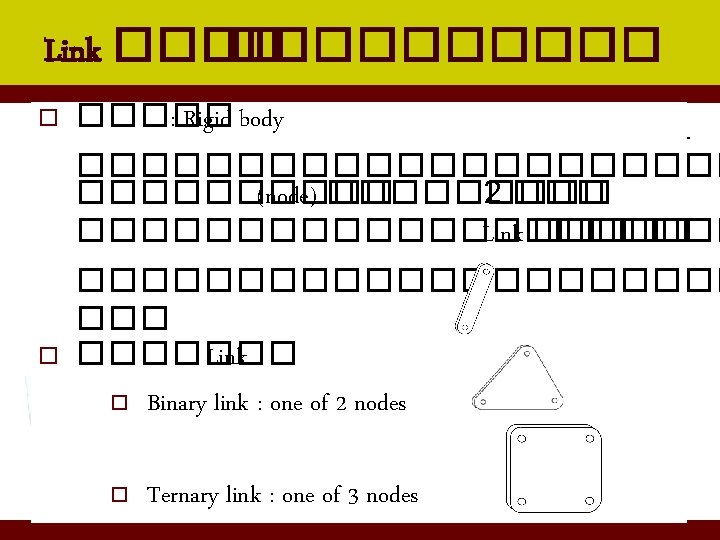
Lower Pair Name (symbol) Revolute (R) Prismatic (P) Screw or Helical (H) Cylindric (C) Spherical (S) Planar or Flat (F) DOF 1 1 1 2 3 3 Contains R Planar Mechanism P R+P R+R+R R+P+P 3 -D Mechanism
Lower pair ���� Full Joint o Revolute (R) : Rotating full pin joint
Lower pair ���� Full Joint o Prismatic (P) : Translating full slider joint
Lower pair ���� Full Joint o o Helical (H) : Spherical (S) : o Cylindric (C) : o Flat (F) :
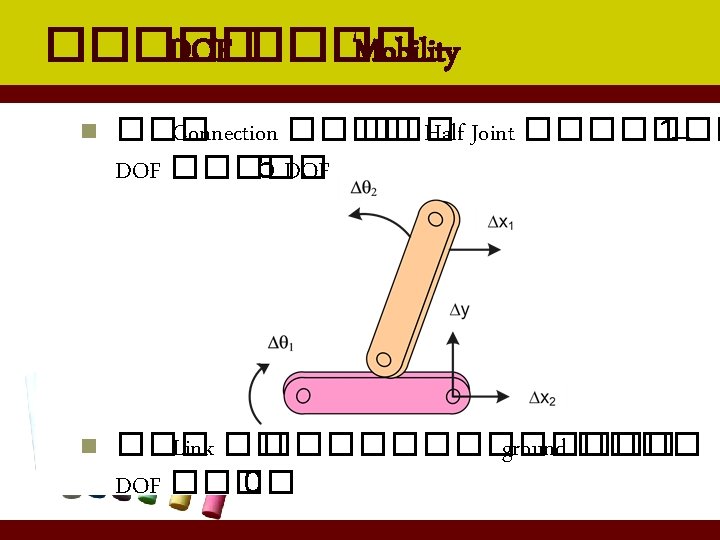
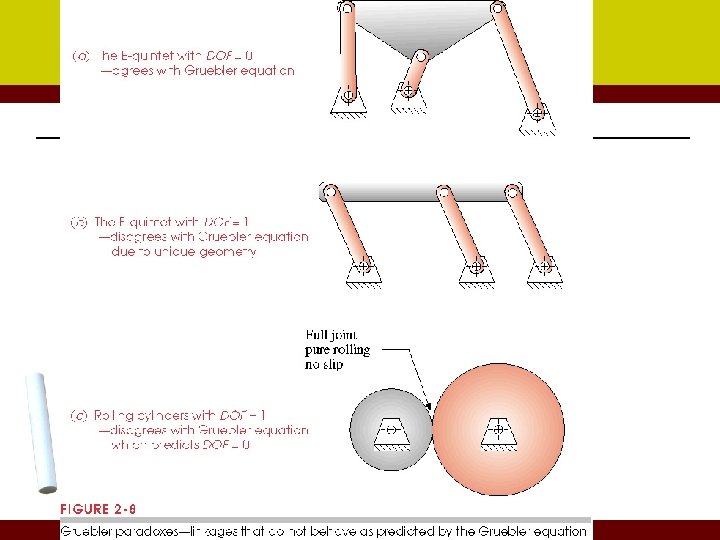
Higher pair ���� Half Joint Roll-slide (RP) : o Linkage & Plane (Force close) o o Pin in Slot )Form Close)
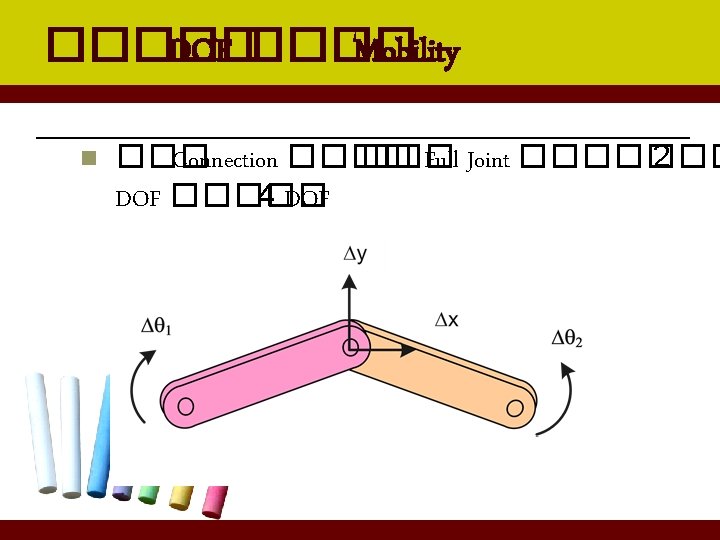
Planar Motion Lower pair ���� Full joint : 1 DOF joint o Higher pair ���� half joint : > 1 DOF, roll-slider o Joint order = ����� link ���� -1 o
Planar Motion
Planar Mechanisms o Kinematics chain n ����� : Assembly ��� Links ��� Joints ���� Input link ��������� Output o Mechanisms: n ����� : Kinematics chain ������� 1 Link ������� Ground ���� reference frame
Planar Mechanisms
����� DOF ���� Mobility o In Planar Mechanisms n ���� Link �� Plane �� 3 DOF n 2 Links ������ 6 DOF
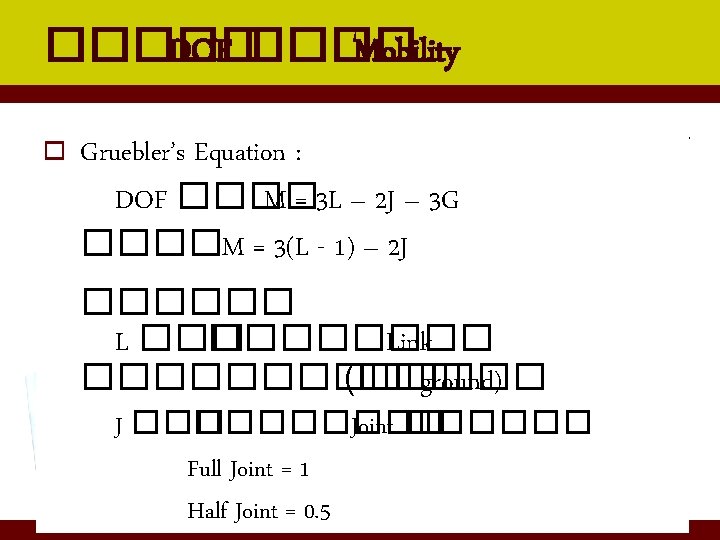
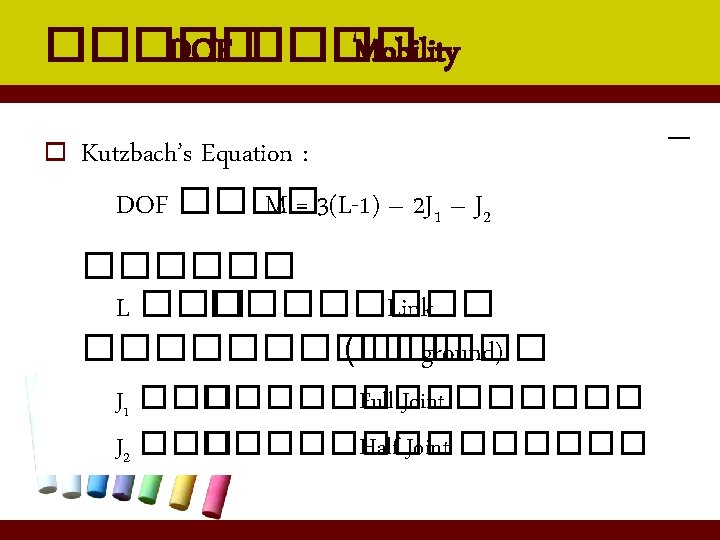
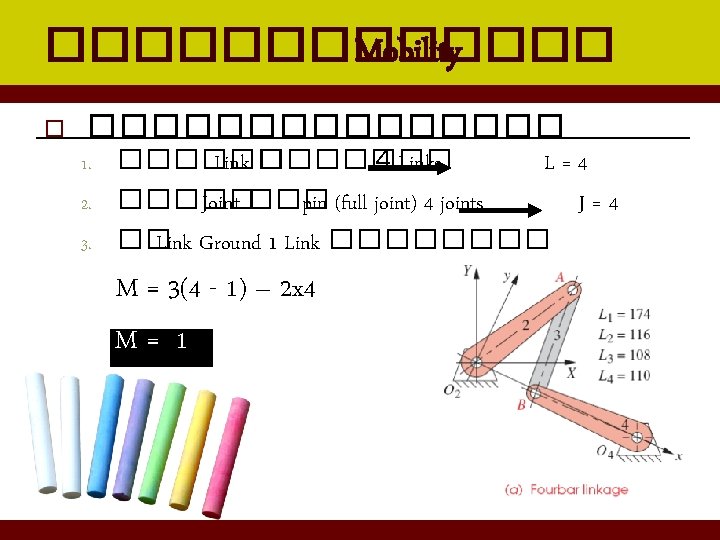
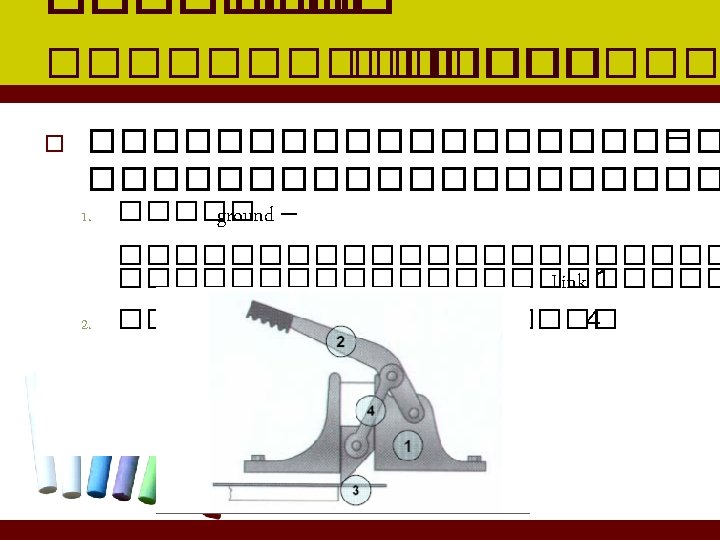
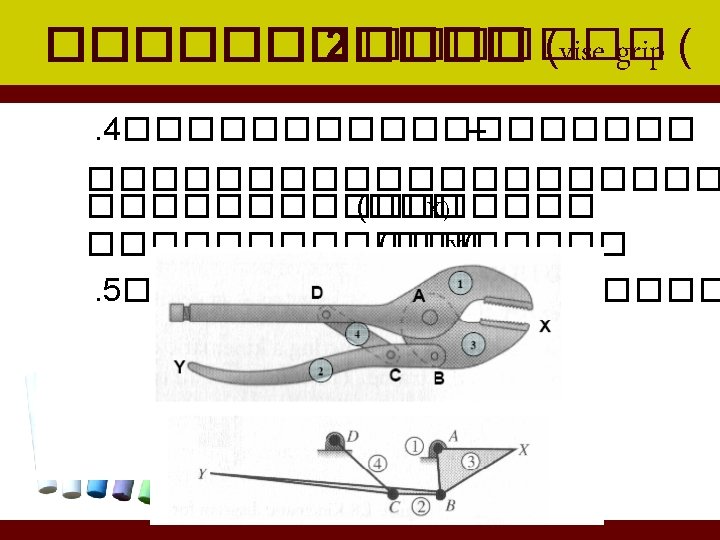
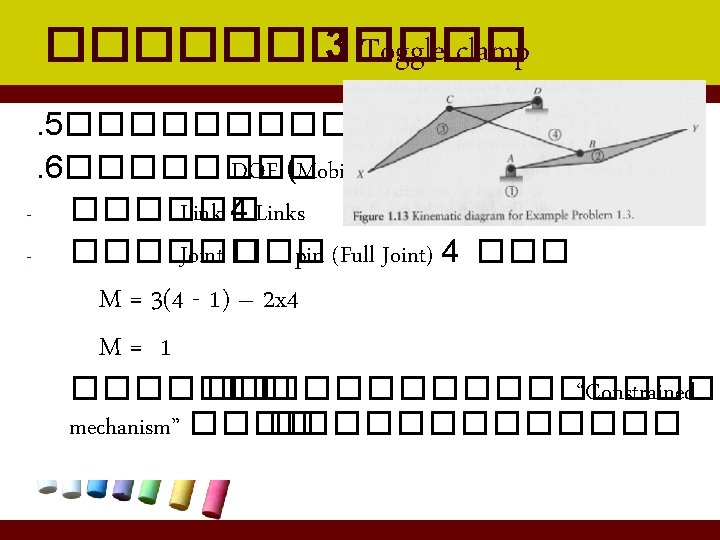
������� Mobility �������� o 1. 2. 3. ������ Link ������� 9 Links L=9 ����� Joint ��� pin (full joint) 10 joints ��� slide 2 joints J = 12 �� Link Ground 1 Link ���� 11 1 2 9 10 65 12 3 78 4 M = 3(9 - 1) – 2 x 12 M= 0
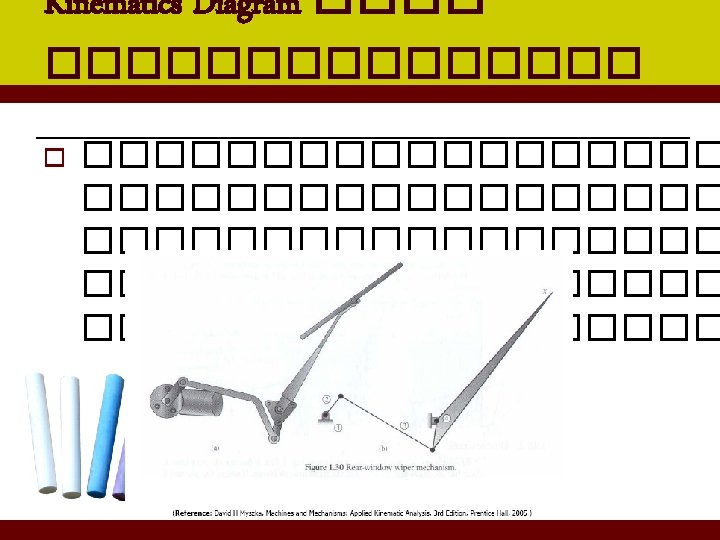
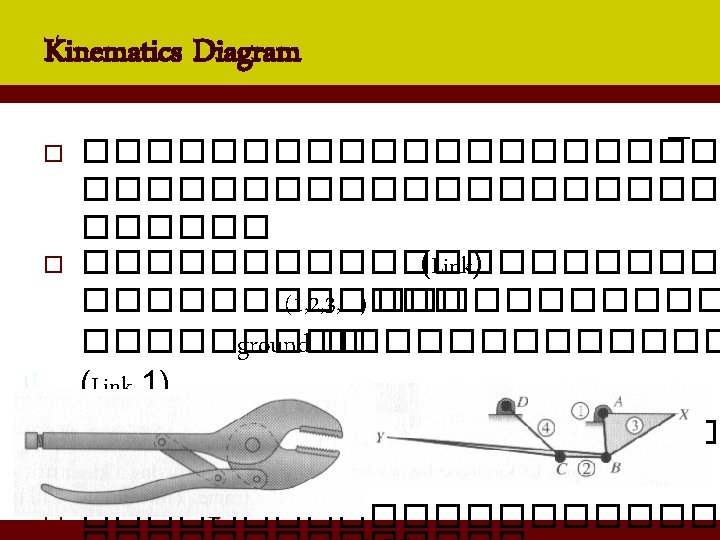
Kinematics Diagram
Kinematics Diagram