FYP FINAL PRESENTATION CT 26 Soccer Playing Humanoid
")







 with soccer playing ability. n")

























- Slides: 36
FYP FINAL PRESENTATION CT 26 Soccer Playing Humanoid Robot (ROPE IV)
CONTENT n n n Introduction Objectives Work and Results n n n Mechanical Structure of ROPE IV Robot Control Problems and Solutions Results Recommendations Conclusions
INTRODUCTION
Humanoid Robot n Motivation behind humanoid research: n n n A machine that interacts naturally with human spaces. People relate better to robots that look similar to us. There is a basic desire to reproduce ourselves.
Soccer n Why soccer for evaluating humanoid? n n n Intensive in leg movements. Test for both speed and agility. Popular sport that can attract huge number of participants.
Robo. Cup n n n One of the world major competition for robot. Its vision. Robo. Cup 2005 will be held July in Osaka, Japan.
Robo. Cup n Events n n n Penalty Kick 2 -2 Games Technical Challenge n n n Walk over rough terrain Walk around poles Shoot the ball against a pole
OBJECTIVES
OBJECTIVES n To build a humanoid robot (ROPE IV) with soccer playing ability. n Able to recover from fallen positions. n Participate in Robo. Cup 2005.
WORK AND RESULTS
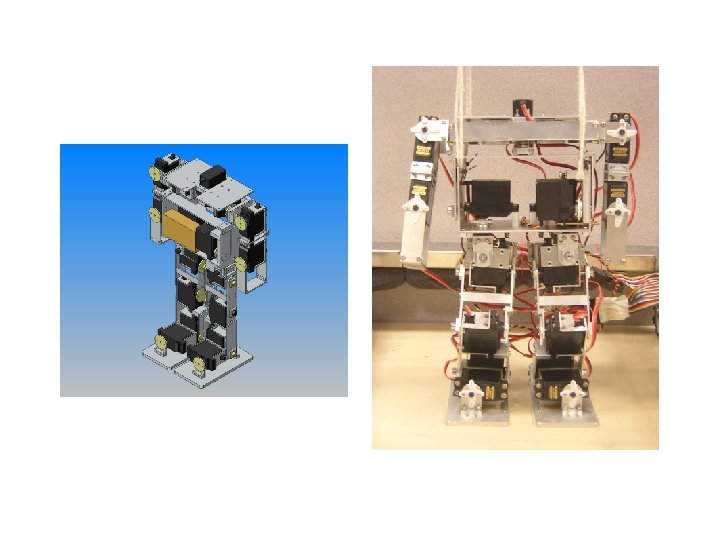
Mechanical Structure of ROPE IV n n n ROPE IV is designed with 22 DOFs. Actuated by servos: 17 DS 8511, 3 HSR 5995 TG and 2 HS-5125 MG servos. Controlled by microcontroller ATmega 128.
Locations and Orientations of DOFs on ROPE IV
Ankle Design ROPE II ROPE IV
Hip Design I ROPE IV
Hip Design II ROPE IV
Body Design Yaw Pitch
Arm Design ROPE IV ROPE II
Robot Control n n n Microcontroller Atmega 128 as ROPE IV’s processor. Two Basic Stamp 2 for PWM signal generation. Integrated onto a PCB designed for ROPE IV.
ROPE IV Controller Board
Walking n n Basically joint space control. The walking cycle was broken down into 6 phases.
LEFT SWING RIGHT SWING LEFT LANDING DOUBLE RIGHT LANDING DOUBLE LEFT SWING
Walking n n n These 6 critical postures could be adjusted by changing the parameters in the Cartesian space. Parameters converted to joint space using inverse kinematics. Currently, calculations for the interpolations of joint angles are done by Basic Stamp 2.
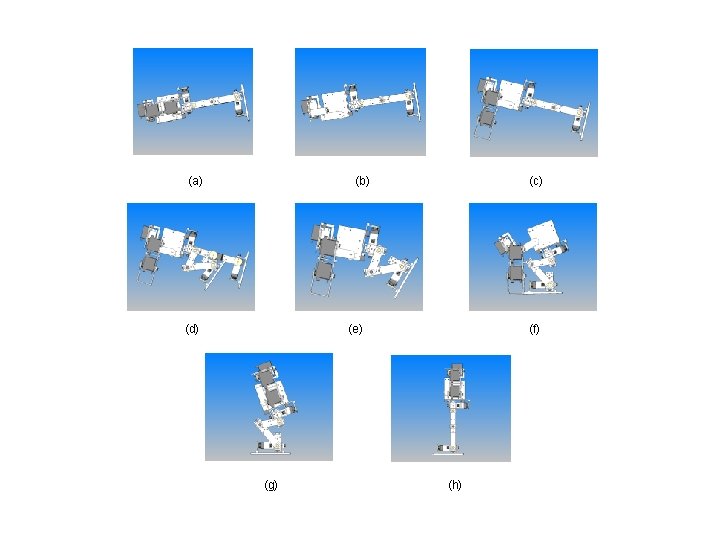
Recovery from fallen position n Made use of the arms and the body pitch. Involves co-ordinations between upper and lower body. Problem in calculations done on Basic Stamp 2.
Problems and Solutions E C FOR
Body Pitch Body Yaw Shoulder Joint
Problems and Solutions Yaw Shaft
Problems and Solutions
Problems and Solutions Before Modification After Modification
Results n Walking n Recover for fallen position n Kicking
RECOMMENDATIONS
Further Robot Control n Algorithms for: n n Walking at higher speed Recovery from fallen facing up / Flipping over from facing up to facing down Other motions Implementation of ATmega 128.
Sensors Incorporation n CMUCam 2 n Infra-red sensors n Force sensors n Digital compass
Conclusions n n n A humanoid robot ROPE IV was built. ROPE IV is capable of recovering from fallen position. ROPE IV will be participating in Robo. Cup 2005.
THE END