Vehculos areos no Tripulados dentro del concepto de






")







 Estimar altura de los Cultivos")








 + C (MDE) Estadísticas de la")



- Slides: 30
Vehículos aéreos no Tripulados dentro del concepto de Agricultura de Precisión en el cultivo de la caña de azúcar César Edwin García Cortes Ing. Topográfico, MSc. Ciencias de la Percepción Remota, Esp. en SIG y Percepción Remota Centro de Investigación de la Caña de Azúcar de Colombia cegarcia@cenicana. org Santiago de Cali, noviembre 22/23 de 2018
Big Data Io. T
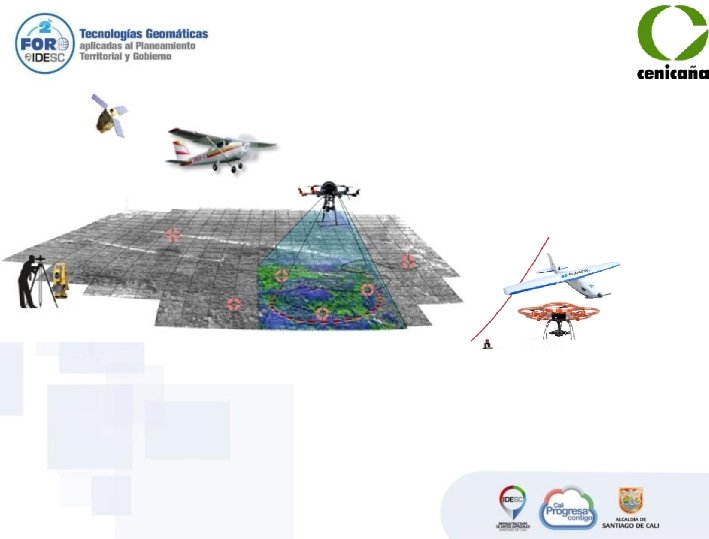
Contexto del trabajo con UAV IMÁGENES ASPERSION Fertilizantes Fungicidas Agroquímico
Aplicación aérea Terra 4 Agri Yamaha's RMAX
Fotogrametría con Drones
Productos Altimetría – Curvas de nivel Planimetría 1. Mosaico 2. Modelo digital de elevación 3. Nube de puntos Estimar alturas (MDE)
Metodología Drone con antena RTK Antena GNSS (Sistema Global de Navegación Por satélite)
Metodología APOYO TOPOGRÁFICO Ajuste del mosaico con los puntos de control Toma de puntos de control en campo con receptor GNSS Para la correcta georreferenciación es necesario obtener posiciones precisas de determinados puntos sobre el área de vuelo. La precisión de los puntos esta acorde a la escala del producto y en ocasiones no es necesario tomar foto control
Drones con RTK
Precisión Horizontal de Mosaicos Métricas EMC RMSE 68% RMSE 90% RMSE 95% RMSE 99% CE 95% CE 90% X Y 0. 000 0. 001 0. 020 0. 025 0. 034 0. 041 0. 040 0. 049 0. 053 0. 065 0. 056 0. 049 Esc 1: 50 Pixel: 2 cm 1. 2. 3. 4. Se obtiene imágenes con tamaño de pixel hasta de 2 cm. Generar cartografía a escalas muy detalladas 1: 100 Generar curvas de nivel a escala detalladas (error 15 cm) Las Imágenes pueden ser integradas a la cartografía o a los sistemas de información geográfica de los ingenios Garcia C. E. , Montero L. , Herrera F. A. , Levantamiento de información topográfica mediante vehículos aéreos no tripulados en un enfoque de agricultura de precisión. In Anais XVII Simposio Internacional SELPER. Puerto Iguazú, Argentina. 7 – 11 Noviembre 2016.
Georreferenciación de líneas de surcado • Levantamiento realizado a los 45 días después de cosecha. • Altura de vuelo a 60 m de altura • Se realizo la digitalización de líneas de surco Georreferenciación de surcos
Georreferenciación de líneas de surcado Fue calculada la distancia mínima entre cada punto y la línea de surcado digitalizada más cercana, obteniendo que el 77. 5% de las posiciones presentan un error menor a 0. 0254 m (1 Pulgada) que es la precisión estándar que se obtienen trabajando con maquinaria con RTK. En este contexto, el 94. 36% de las posiciones presentan un error menor a los 0. 05 m y se presentó un error máximo de 0. 430 m, sin embargo la frecuencia de errores altos es mínima y estos se presentan al inicio o al final de cada surco Garcia C. E. , Montero L. , Herrera F. A. , Levantamiento de información topográfica mediante vehículos aéreos no tripulados en un enfoque de agricultura de precisión. In Anais XVII Simposio Internacional SELPER. Puerto Iguazú, Argentina. 7 – 11 Noviembre 2016.
Identificación de áreas de resiembra Drone Campo Sensibilidad Especificdad VVP VPN 35% 75% 10% 93% 0 1 0 996 70 1 330 38 Capacidad de predecir donde se resiembra Capacidad clasificar bien donde no hay que resembrar Prob de haber espacio dado que el Drone lo marcó Prob de que no se necesite resiembra dado que el Drone lo dijo
Levantamiento Altimétrico Max=0, 351 Min=0 Media= 0, 054 Estadísticas de la regresión Coeficiente de correlación múltiple Coeficiente de determinación R^2 ajustado Error típico Observaciones 0. 91 0. 84 0. 065 232
MDE (Modelo Digital de Elevación) Estimar altura de los Cultivos
MODELO DIGITAL DE ALTURAS vs ALTURAS OBSERVADAS AL DOSEL
Imágenes Multiespectrales para el monitoreo y seguimiento del cultivo 1. 2. 3. 4. 5. 6. Estado vegetativo. Estimación de Clorofila IAF Deficiencias nutricionales Estreses Hídrico Estimación de Productividad
Cámaras Multiespectrales Información espectral en azul, verde, rojo, red Edge y NIR CÁMARA RED EDGE CÁMARA Mini MCA
Calibración indirecta 75 % 6% 24% 48% 75%
RESULTADOS Corrección de Micasense Vuelo Panel Azul Verde Rojo Red. Edge 1 2 NIR Azul Ajuste por lonas Verde Rojo Red. Edge NIR 6% 8% 9% 13% 6% 6% 6% 5% 2% 25% 26% 28% 30% 36% 24% 25% 26% 27% 29% 48% 50% 52% 50% 51% 55% 48% 48% 47% 52% 75% 51% 56% 50% 58% 70% 49% 52% 48% 54% 70% 6% 9% 10% 16% 7% 6% 6% 6% 2% 25% 30% 33% 32% 33% 39% 24% 25% 24% 29% 48% 59% 62% 61% 64% 59% 48% 48% 53% 75% 73% 69% Valores en reflectancia Función de ajuste para el vuelo 1 1. 2. 3. 4. 5. Banda azul =0. 9922 x - 0. 0166 Banda Verde = 0. 9793 x - 0. 0257 Banda Roja = 0. 9983 x - 0. 0227 Banda Redege = 0. 9978 x - 0. 0387 Banda Infrarroja = 1. 182 x - 0. 1304
Índices de vegetación y estimación de productividad Mapa de productividad Índice de vegetación
Estadísticas de la regresión Coeficiente de correlación múltiple 0, 88 Coeficiente de determinación R^2 0, 78 R^2 ajustado 0, 78 Error típico 13, 03 Observaciones 54
Estadísticas de la regresión Coeficiente de correlación múltiple 0, 69 Coeficiente de determinación R^2 0, 47 R^2 ajustado 0, 46 Error típico 10, 32 Observaciones 54
Regresión Lineal TCH = -A + B (GNDVI) + C (MDE) Estadísticas de la regresión Coeficiente de correlación múltiple 0, 89 Coeficiente de determinación R^2 0, 80 R^2 ajustado 0, 80 Error típico 12, 37 Observaciones 54
https: //tn. com. ar/tecno/f 5/lo-black-mirror-crean-abejas-roboticas-que-polinizan-como-las-reales_757945
GRACIAS