Universitatea Tehnica Gh Asachi Iai MOTOARE PAS CU

 este un")










")


: m=2 - Două statoare cu bobină")


 Constructie Statorul - m=2 faze la 900 el. , Ps=1,")
 Uzual ps=2, Zs=8 Piesa polara danturata")



: -")


 • Se alimentează alternativ o")


 • Se alimentează alternativ")
 6 Ca şi")






- Slides: 42
Universitatea Tehnica “Gh. Asachi” Iași MOTOARE PAS CU PAS Variante constructiv-functionale Conf. dr. ing. Cojocaru-Filipiuc Carmen Cuprins
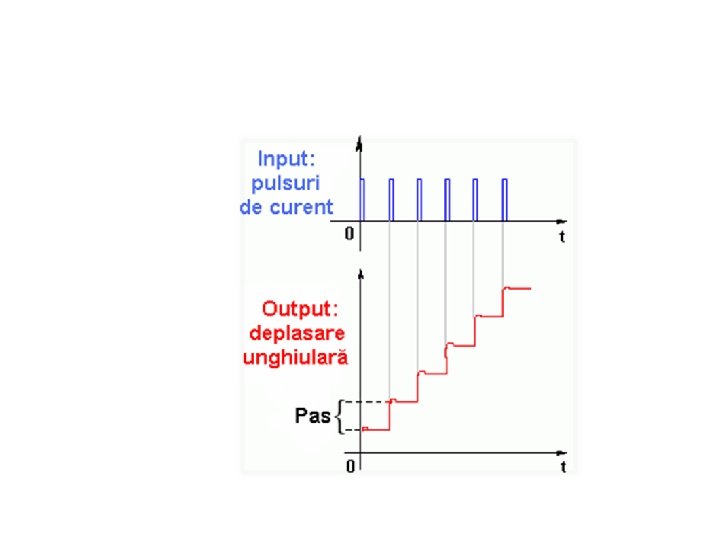
Caracterizare generală a MPP • Motorul pas cu pas, MPP (stepper motor) este un convertor electromecanic care realizează o conversie / o corespondență univocă între un tren de impulsuri de comandă și mișcarea mecanică a axului formată din deplasări discrete / incrementale, de mărime egală, θp , numite pași ai motorului. • La funcţionarea corecta numărul paşilor efectuaţi este riguros egal cu numărul impulsurilor de comandă primite. • • MPP sunt motoare sincrone, cu mișcare incrementală / discontinuă. Constructiv: - stator - o infasurare polifazata plasata pe miez feromagnetic , - alimentata secvential, cu comutatie la fiecare impuls de comanda, - rotor a. - pasiv, cu dinţi feromagnetici lipsiţi de excitaţie, ( Mrel ) sau b. - activ, cu un camp magnetic de excitație ( Ex. MP, sau Ex. EM), b. 1 - miez feromagnetic de formă netedă ( Mex ) sau b. 2 - miez feromagnetic danturat, ( Mex+ Mrel ) şi este executat fără înfăşurări auxiliare de pornire. • Cuplul electromagnetic dezvoltat este un cuplu de reluctanță variabilă sau / și un cuplu de excitație : Mrel , sau Mex+ Mrel • Construcția specifică prezintă o accentuată danturare a părții fixe și a celei mobile astfel încât specific MPP este producerea Mrel care acționează spre o aliniere a dinților într-o poziție de reluctanță minimă a circuitului magnetic ( distorsiune minima a liniilor campului magnetic rezultant ).
MPP sunt asociate cu blocuri electronice de comandă-alimentare specifice : • GIFV, un generator de impulsuri de frecventa variabila (in fig. : P-potentiometru de prescriere, C. T. F. -convertor tensiune/frecventa, F. I. -formator de impulsuri ) • DI , un distribuitor de impulsuri care indeplineste functii logice; la intrarea DI se aplica diverse comenzi: Start/Stop, Sens de rotatie, Mod de pasire (full-step, half-step etc). Nr. de pasi prescrisi etc) , iar la iesire se livreaza semnalele de comutatie pentru tranzistoarele din driver-ul Dr; în sistemele avansate DI se bazează pe utilizarea unui µcontroler, µC • • • Dr , un comutator static cu tranzistoare de putere adecvata, denumit driver Sursa de c. c. Nr. PASI!!!!!
Caracterizare generală a MPP ●Particularități funcționale MPP: - alimentarea fazelor statorice se efectuează în mod succesiv, secvențial (din driver, Dr), cu curent de valoare constantă (unda dreptunghiulara), de la o sursă de c. c. ; - înfășurarea statorică crează un câmp magnetic pășitor ; - comutația alimentarii fazelor, este determinată de impulsurile de comandă (primite de distribuitorul de impulsuri, DI), iar la fiecare impuls de comandă se produce o comutație și o delplasare a axului cu un pas; - pot lucra în buclă deschisă, fara reacție inversă / feedback, fara pierdere de pași; - memorează poziția finală de stare alimentată; - funcţionează în ambele sensuri de rotaţie şi permit o accelerare, oprire şi reversare rapidă , fără pierderi de paşi, daca sunt comandate cu o frecvenţa mai mica decât o anumită frecvenţă limită. MPP sunt perfect integrabile în sisteme de actionare digitale / cu comandă numerică. ●MPP sunt utilizate în aplicaţii de pozitionare precisa. ●MPP constituie elemente de execuţie cu funcţia de convertor electromecanic digital-analogic.
Caracterizare generală a MPP • MPP se pot construi : - atât cu mișcare de rotație cât și - cu mișcare de translație, iar • MPP rotative pot fi : - atât de formă cilindrică (cu flux radial ) cât și - de formă discoidală (cu rotor disc si flux axial ). Construcția clasică, rotativă, cilindrică, cu rotor interior: • Statorul MPP este constituit din m înfăşurări de fază / comandă care sunt alimentate succesiv/secvențial cu undă rectangulară de curent de la sursa de c. c. prin intermediul driver-ului cu tranzistoare. Campul magnetic statoric paseste cu Frecvent curentul este controlat pentru a se realiza controlul cuplului. • Rotorul MPP este construit - fie pasiv, cu dinţi feromagnetici lipsiţi de excitaţie, - fie activ, cu un sistem de excitație ( Ex. EM, sau Ex. MP), de formă netedă sau danturată, şi este executat fără înfăşurări auxiliare de pornire.
Clasificări ale MPP se pot clasifica de asemenea în funcţie de următoarele criterii: Ø tipul constructiv-funcțional : • MPP cu reluctanţă variabilă, MPP-RV, • MPP cu excitație (uzual cu magneţi permanenţi), si rotor neted , MPP-MP • MPP hibride (combinând primele două tipuri), MPP-RV+MP, Ø numărul înfăşurărilor de comandă: • cu 1 (rar), 2 , 3 , 4 (cel mai frecvent), sau 5 infasurari. Ø constructia înfășurărilor statorice : - normală (unifilara) - bifilară Ø modul de alimentare: • unipolar sau bipolar • alimentarea simpla sau dubla Ø modul de comandă: • cu pas întreg (full step) • cu jumătate de pas (half step)=nr. dublu de pasi/rotatie • cu micropăşire (microstepping)=nr. mare de pasi/rotatie
MPP cu reluctanță variabilă, MPP-RV
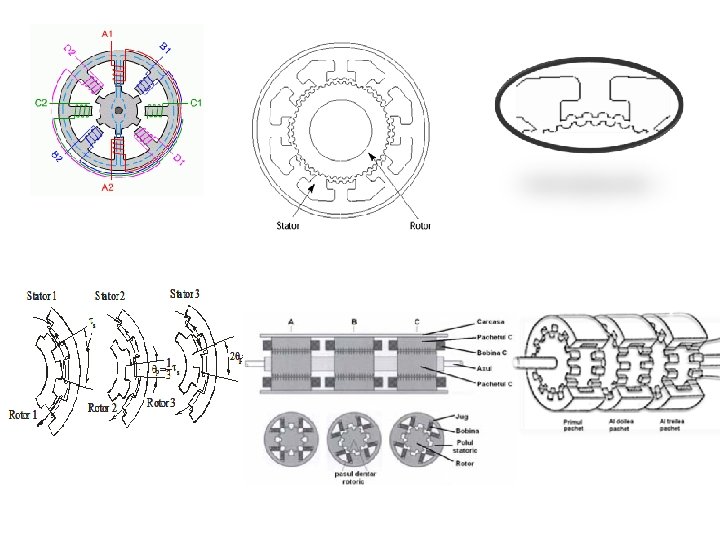
MPP cu reluctanță variabilă, MPP-RV Funcţionează pe principiul reluctanţei minime: partea mobilă are tendinţa de a se aşeza în poziţia în care inductanţa înfăşurării alimentate (precum şi fluxul produs de aceasta) sunt maxime. Construcția clasică, rotativă, cilindrică: statorul : - contine înfăşurări de fază alimentate secvențal (uzual m=4 , m=3) , rotorul este pasiv (fără înfăşurări sau MP) : - cu poli aparenţi / proeminenți feromagnetici. Două tipuri constructive: a. MPP-RV monostatorice (cu o singură unitate stator-rotor) a. 1. MPP-RV normale, cu nr. mic de pași/rot. (6, 8, 12, 24. . . ); Stator si rotor cu poli aparenti. a. 2. MPP-RV tip reductor, cu nr. mare de pași/rot (72, 200. . . ). Rotor danturat și piese polare statorice danturate cu acelasi pas dentar. b. MPP-RV polistatorice : cu mai multe unităţi stator-rotor, “multi stack” ; câte un stator-rotor pentru fiecare fază: b. 1. MPP-RV cu bobine statorice solenoidale pe dinti proeminenti , inseriate pt. a forma o faza; b. 2. MPP-RV cu o bobină statorică circulară / inelară (unică pentru o faza) plasata intr-o carcasa feromagnetică. In ambele cazuri segmentele rotorice (de faza) sunt danturate cu acelasi nr. de dinti ca si statorul. Ambele construcții polistatorice pot fi construite: –cu statoarele aliniate și segmenrele rotorice decalate, sau –cu statoarele decalate și segmentele rotorice aliniate. :
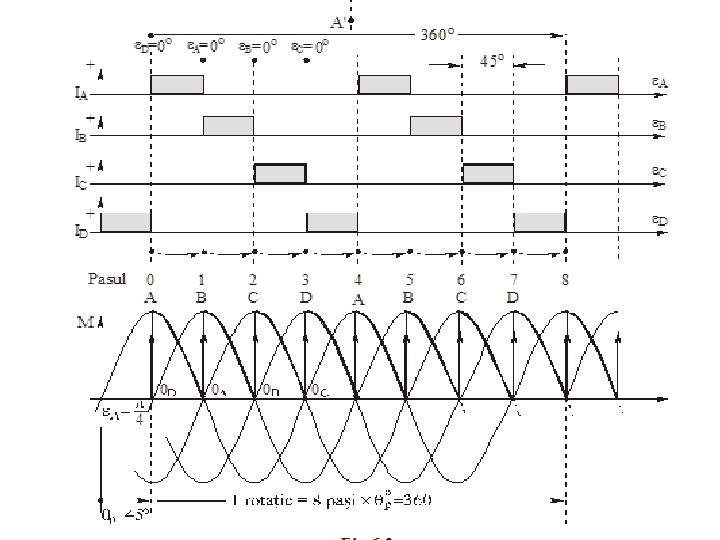
MPP-RV- principiul de constructie-functionare Construcţia şi diagramele de cuplu pentru MPP-RV monostatoric-normal – elementar m = 4 faze decalate la 45 gr. el. ( ps=1) - infasurare monofilara(2 semibob. pe poli opusi, seriate) -alimentare monopolara - 2 cicluri de alimentare pentru un ciclu electric complet - dezvoltă cuplul maxim în momentul comutației MPP-RV elementar : m=4 ps=1, Zs=8 ( pr =1); Zr=2; (Zs/Zr)=8/2, p = 45 o; 8 paşi/rotaţie. SCHEMA!!!!
MPP-RV- principiul de constructie-functionare x Construcţia şi diagramele de cuplu pentru MPP-RV monostatoric-normal – elementar: Ex. Nr. min de faze! m = 3 faze decalate la 60/1200 el. (sens rotatie clkw) - înfășurare monofilară - alimentare monopolară, - 2 cicluri de alimentare pentru un ciclu electric complet - Cuplul in momentul comutatiei MPP-RV elementar m=3; ps = 1; Zs=6 ; Zr=2 Zs/Zr= (6/2), p = 60 o; 6 paşi/rotaţie. SCHEMA!!
MPP-RV construcție monostatorică Metode de cresterea a nr. de pasi/rot. • Cresterea nr. de faze; neconvenabil deoarece creste nr. tranzistoare: uzual m=4, m=3 • Cresterea nr perechi poli statorici, ps, respectiv poli proeminenti statorici Zs=2 mps q - Cresterea nr. de poli proeminenti / dinti rotorici, Zr; Varianta constructiva se caracterizeaza prin raportul numerelor de dinti statorici/rotorici ( Zs/Zr ) Unghiul de pas se calculeaza cu relatia: Exemple: 8/6, ……
• MOTOARE PAS CU MAGNEŢI PERMANENŢI, MPP-MP
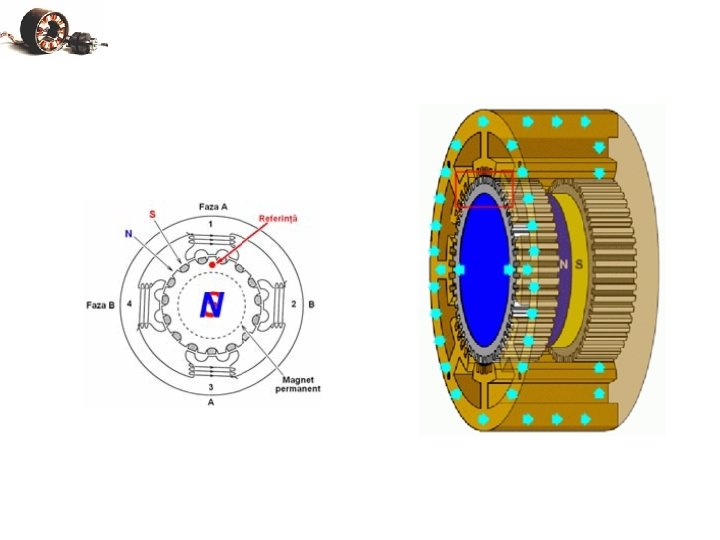
MPP-MP Construcţia: statorul: uzual cu 2 faze , m=2 (decalate la 900 el. ) 2 variante constructive - Normala = Poli aparenți cu bobine concentrate solenoidale; - “Multistack” = 2 pachete statorice tip “tin-can” cu poli gheară și bobine inelare. Înfășurarea statorică pote fi - monofilară (2 circuite de comandă, c=2)), caz în care este necesară o alimentare bipolară, sau - bifilară (4 circuite de comandă, c=4), caz în care se poate aplica o alimentare monopolară. rotorul activ ( cu MP ) poate fi: - neted (magnetizare radială , cu un număr de perechi de poli, Pr), notația adoptată MPP-MP, în care se dezvoltă doar Mex, s - asociat cu poli/dinți feromagnetici , MPP hibride, MPP-H , în care se dezvoltă Mex+Mrel. Funcționarea: Axa MP rotoric se orientează după axa câmpului magnetic statoric (axa bobinelor alimentate) ca in orice maşina sincrona. Cuplul electromagnetic de excitație dezvoltat, atunci când întrefierul rotor-stator este constant, are expresia generală: Valoarea maximă a cuplului, Mmax, se obţine atunci când rotorul este deplasat cu un unghi =90 o electrice faţă de poziţia de aliniere a axei unui pol rotoric cu axa unui pol statoric ( = 0).
MPP-MP Categoria MPP-MP în care se dezvoltă doar cuplu de excitație, Mex. Construcţia tipică: Statorul : - cu 2 faze , m=2 (decalate la 900 el. ) - construcție multistack - 2 pachete statorice tip tin-can cu poli gheară și bobine inelare Înfășurarea statorică pote fi - monofilară (2 circuite de comandă, c=2)), caz în care este necesară o alimentare bipolară, sau - bifilară (4 circuite de comandă, c=4), caz în care se poate aplica o alimentare monopolară. Rotorul activ ( cu MP ): - neted (magnetizare radială , cu un nr. de perechi de poli, Pr), notația adoptată : MPP-MP, în care se dezvoltă doar Mex. Funcționarea: Axa magnetului permanent se orientează după axa câmpului magnetic (axa bobinelor alimentate) similar cu maşinile sincrone. Cuplul electromagnetic de excitație dezvoltat, în cazul când întrefierul rotor-stator este constant, este de forma generală: Atunci când rotorul cu MP este asociat cu poli/dinți feromagnetici proeminenți, se obțin MPP hibride, MPP-H , în care se dezvoltă Mex+Mrel.
MPP-MP- principiul de constructie-functionare Construcţia şi diagramele de cuplu pentru un MPP rotor activ, MPP-MP elementar. m=2 Infasurare monofilara (c=2) Alimentare bipolară MPP-MP elementar: m = 2, ps=1, Zs = 2 ps m q = 4 Perechi poli rotorici pr=1 (Pr=2 pr=2) (Zs/Pr)=(4/2): θp=900, 4 pași/rot. Valoarea maximă a cuplului, Mmax, se obţine atunci când rotorul este deplasat cu un unghi =90 o electrice faţă de poziţia de aliniere a axei unui pol rotoric cu axa unui pol statoric ( = 0). 4 paşi/rot.
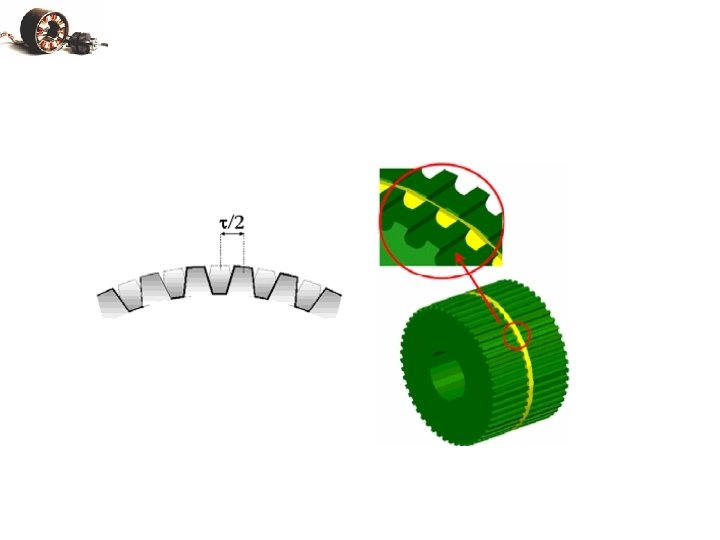
MPP-MP constructie polistatorica, tip “cutie de conservă”(“tin can”): m=2 - Două statoare cu bobină inelară şi poli gheară decalati la 90 gr. el; - Fiecare stator reprezinta o faza - Rotorul este magnetizat radial cu un nr. de perechi de poli egal cu al statoarelor ( segmente longitudinale de MP magnetizate alternativ N-S pe direcţia radială); - Polii rotorului se vor alinia cu polii gheară ai statorului alimentat: Polii gheară de pe stator au deschidere egală cu doi paşi polari rotorici și sunt decalaţi la jumătate de pas polar (τ/2 , 900 el. ) respectiv ¼ din distanta dintre 2 dinti de aceeasi polaritate-pasul dentar:
MPP-MP constructie polistatorica, tip cutie de conservă
MOTOARELE PAS CU PAS HIBRIDE, MPP-H
MPP – hibride (MPP-H) Constructie Statorul - m=2 faze la 900 el. , Ps=1, 2. . . etc. - Bobine concentrate pe poli proeminenți - Înfășurarea de fază: –monofilară (2 circuite de comandă), care necesita alimentare bipolară, - bifilară (4 circuite de comanda, c=4) care admite alimentare monopolară (variantă tipică, exclusivă). -Piesa polară danturată cu pasul dentar rotoric (un nr. de dinți, 3, 4, 5. . distribuiți simetric față de axa polului statoric) Rotorul: - MP de formă cilindrica (inelară), dispus longitudinal; - La extremitati - 2 coroane danturate cu Zr dinti intercalați, decalati cu ½ pas dentar si de polaritate opusa (decalare cu 1800 el. ). - Rezulta un numar de perechi de poli rotorici egal cu numarul de dinti ai unei coroane, Pr =Zr Avantaje datorate prezenţei MP: - Cuplul motorului este mai mare datorită componentei de cuplu dat de magnet; - Motorul are cuplu şi în repaus, deci poziţia rotorului este reţinută; - La executarea paşilor oscilaţiile sunt mai amortizate.
Statorul: m=2 infasurare bifilara, c=4 (circuite de comanda) Uzual ps=2, Zs=8 Piesa polara danturata cu pasul dentar rotoric
• MOTOARE PAS CU PAS HIBRIDE Constructie tipica • • m=2, c=4, ps=2, Zs=8, Piesa polară danturată, cu dinții distribuiți simetric față de ax Pr=50 perechi de poli, Θp=1, 80, 200 pași/rot s=(360/8)=6(360/50)+(360/50)/4=6 x 7, 2+7, 2/4=6 x 7, 2+1, 8
• • • Nu rezzulta pasul!! Se aliniaza toti dintii? 96/8=12 fix!!
Varianta MPP-H cu 4 segmente rotorice (1 şi 3, respectiv 2 şi 4 sunt aliniate identic) :
Metode de alimentare a bobinelor MPP-pentru MPP-MP sau MPP-hibrid Comanda monopolară (unipolar drive): - Simetrică simplă - Simetrică dublă - Nesimetrică • Tensiunea de alimentare aplicata înfăşurărilor MPPîntr-un singur sens • Se poate aplica la MPP-RV (monofilare) MPP-MP si MPP-H cu infasurare bifilara; • Infasurari bifilare cu priza mediana accesibila. Cate un tranzistor aferent conectează bobina care urmează să fie alimentată pe baza secvenţei de comandă dată; Comanda bipolară (bipolar drive): - Simetrică simplă - Simetrică dublă - Nesimetrică • Alimentare cu tensiune de alternativa (de ambele sensuri); • Metoda se poate aplica atât MPP cu MP cât şi celor hibride; • Bobinajul MPP comandat astfel este monofilar , mai simplu, nefiind nevoie de scoaterea prizei mediane; • Necesită driver de putere mai complex, care poate asigura alimentarea bobinelor de ambele polarităţi ( - invertor în punte H(4*4 tr) si sursa simpla sau - cate un brat de puntepentru fiecare faza (2*2 tr) si sursa dubla; Comanda cu micropăşire: • Se alimentează prin invertoare simultan 2 faze ale MPP cu trepte de • • tensiune; Cele două forme de undă ale curenţilor se formează din k trepte; Pasul motorului este divizat de k ori! , fiind metoda cea mai eficientă în scăderea pasului şi creşterea preciziei în sisteme de poziţionare.
Alimentare monopolară – simetrică simplă • La fiecare moment de timp doar o singură bobină este alimentată • Se dă secvenţa de alimentare a bobinelor (1 logic însemnând bobină alimentată, iar în urma alimentării polul pe care este plasată bobina se magnetizează cu polaritate S)
Comanda monopolară – simetrică dublă • La fiecare moment de timp două bobine de pe faze diferite sunt alimentate (nu se alimentează niciodată două bobine de pe aceeaşi fază!) • Dat fiind faptul că se alimentează simultan două faze consumul de putere este mai mare. Cuplul produs este aproximativ cu 1, 4 ori mare.
Comanda monopolară – nesimetrică (la 1/2 de pas-”half step”) • Se alimentează alternativ o singură fază şi două faze: faza 1, apoi 1 şi 2, apoi 2 şi 3, etc. • În acest caz pasul motorului se reduce la jumătate (half stepping) existând o poziţie de echilibru între doi paşi întregi.
Comanda bipolară – simetrică simplă • La fiecare moment de timp se alimentează o fază (două bobine legate în serie şi în opoziţie : când un pol se polarizează N polul opus se va polariza S) • Se dă secvenţa de alimentare a bobinelor (1 şi -1 înseamnă bobină alimentată cu tensiune pozitivă, respectiv negativă)
Comanda bipolară – simetrică dublă • În fiecare moment de timp două faze sunt alimentate (practic toate bobinele sunt alimentate permanent)
Comanda bipolară – nesimetrică (la 1/2 de pas ”half step”) • Se alimentează alternativ o singură fază şi două faze, pasul motorului redându-se la jumătate (half stepping)
Nr. terminale Conexiunile μMPP-. . . MP sau H 8 MPP-MP(H) 6 Ca şi un MPP cu 5 fire 5 4 Conexiune standard Nu este posibilă MPP-MP(H) În serie MPP-MP(H) Comandă monopolară Ca şi un MPP cu 6 sau 5 fire Comandă bipolară Conexiuni în serie sau în paralel Conexiuni în serie sau câte-o bobină neconectată Nu este posibilă Conexiune standard MPP-MP(H) În paralel MPP-RV
Schema de comandă-alimentare a μMPP Comanda unui MPP se face printr-un dispozitiv electronic de putere numit contactor static (driver), care alimentează secvenţial înfăşurările fazelor motorului. Prelucrarea logică secvenţială este realizată printr-un dispozitiv electronic numit distribuitor de impulsuri, care distribuie impulsurile, în funcţie de sensul de rotaţie. Acestea sunt date de un controler de intrare (compus din generatorul de impulsuri comandat în funcţie de viteză şi deplasarea prescrisă) driverul BD-298 • "STEP" MPP efectuează un pas • Comutatorul S 1 se modifică sensul de rotaţie Ex. : Circuit electronic pentru comanda unipolară a MPP
Cuprins Avantaje • asigură univocitatea conversiei impuls-deplasare şi pot fi utilizate în circuit deschis, fără reacţie ; • gamă largă a frecvenţei de comandă ; • precizie şi rezoluţie ridicate (prin număr de paşi pe rotaţie mare şi corespunzător, unghi de pas mic) ceea ce simplifică lanţul cinematic motorobiect antrenat ; • permit porniri, opriri şi reversări fără pierderi de paşi ; • memorează poziţia finală, astfel încât, poziţia de repaos este stabilă, în special în cazul MPP cu magnet permanent ; • sunt compatibile cu sistemele de control numeric;
Cuprins Dezavantaje • unghiul de pas, deci incrementul de rotaţie este de valoare fixă pentru un motor de o construcţie anumită; • randament scăzut, ceea ce este mai puţin important în cazul puterilor nominale mici şi foarte mici; • posibilităţi limitate de a acţiona mecanisme cu inerţie mecanică mare; • viteză de rotaţie relativ scăzută, majorată însă sensibil prin perfecţionările de construcţie şi de comandă din ultimii ani ; • necesită o schemă de comandă specifică tipului de motor utilizat şi relativ complexă, pentru funcţionarea la frecvenţe, respectiv viteze mari;
Cuprins Aplicații cu utilizarea μMPP Cele mai tipice aplicaţii ale MPP: • Maşini unelte cu comandă numerică (NC machine tools) • Echipamente periferice (plottere, imprimante, unităţi de floppy disk, de hard disk, etc. ) • Sisteme precise de poziţionare (maşini de prelucrare cu laser, industria semiconductoarelor, etc. ) • Echipamente de automatizare (bancomate, aparate de numărat bani, etc. ) • Aparatură de birotică (copiatoare, faxuri, etc. )
Cuprins Aplicații cu utilizarea μMPP Imprimante Plottere Mese de indexare
Cuprins Aplicații cu utilizarea μMPP… Echipamente de automatizări industriale Unităţi de floppy disc Unităţi de hard disc