Two Main Types of GPS Receivers GPS RECEIVERS










+ Ion+ Tr")


 Navigation Uncertainty Estimate")
![UTC(A)-UTC(B)=[UTC(A)-GPS-d. SA] – [UTC(B)-GPS-d. SB]= UTC(A) - UTC(B) – (d. SA-d. SB) 10/20/2021 24](https://slidetodoc.com/presentation_image_h2/d611ad0dec1b87a06e441e70be675170/image-24.jpg "UTC(A)-UTC(B)=[UTC(A)-GPS-d. SA] – [UTC(B)-GPS-d. SB]= UTC(A) - UTC(B) – (d. SA-d. SB) 10/20/2021 24")
- Slides: 24
Two Main Types of GPS Receivers GPS RECEIVERS GPS FOR NAVIGATION AND POSITIONING 10/20/2021 GPS FOR TIME AND FREQUENCY TRANSFER 2
GPS Receiver and Satellite coordinates 10/20/2021 3
GPS for Navigation 10/20/2021 4
GPS Receivers for Time and Frequency Transfer 1 PPS - PULSE PER SECOND 5 MHz, 10 MHz 1. 544 MHz, 2. 048 MHz 10/20/2021 5
GPS Satellite Signals 10/20/2021 6
GPS Time and Frequency Transfer One way – צדדית - העברת זמן ותדר חד Single-channel – ערוצית - השקפה משותפת חד common view Multi-channel – ערוצית - השקפה משותפת רב common-view Carrier phase – פזה נושאת Two way – צדדית - העברת דו 10/20/2021 n n n 7
10/20/2021 GPS Technique Timing Uncertainty, 2 Frequency Uncertainty 2 One Way 200 - 50 ns 10 -11 – 10 -12 Common. View SC 10 - 5 ns 5 x 10 -14 Common. View MC 5 - 1 ns 5 x 10 -14 Carrier Phase 500 ps 5 x 10 -15 Two Way 100 ps 5 x 10 -15 8
GPS Common View Time Transfer 10/20/2021 9
Differential GPS Positioning 10/20/2021 10
Two Way Time Transfer 10/20/2021 11
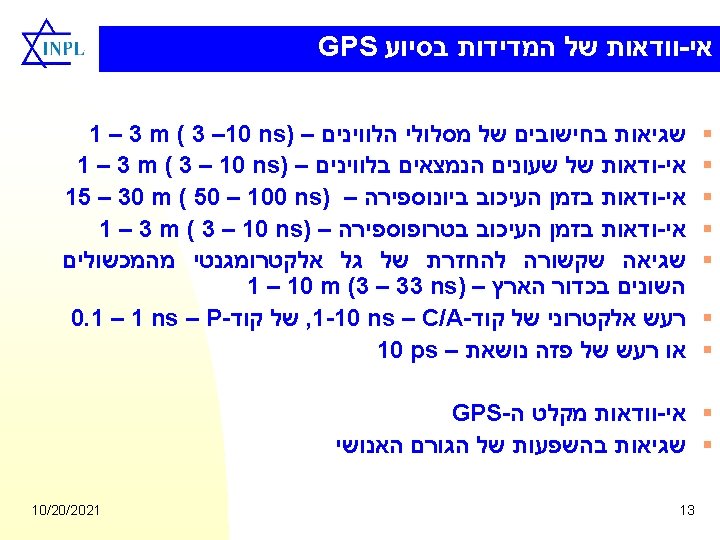
The basic equation for GPS measurements n P = +d +c(dt-d. T)+ Ion+ Tr + P+ mult + c T, (1) where is the geometric range; d is the orbital error; dt, d. T are the satellite and receiver clock errors; Ion is the ID; Tr is the TRD; P is the receiver code noise; mult is the multipath error n = [(Xs-Xr)2+(Ys-Yr)2+(Zs-Zr)2]1/2 10/20/2021 (2) 12
Block Diagram of GPS Receiver Calibration System Distrib. 5 MHz Distrib. 1 PPS HP 5071 A Cs-Clock 1 pps 5 MHz Commut Processor 1 pps 5 MHz Start Stop 5 MHz 1 pps 5 MHz GPS Receiver ICR 5 MHz Time Interval Counter Start Stop PC 1 UUT GPS Receiver 10/20/2021 1 pps Generator PC 2 18
כיול קבלים במעבדה הלאומית לפיזיקה 10/20/2021 וודאות מזערית - אי תחום תדרים / תדר תחום / גודל הנמדד 50 ppm 1 k. Hz 1 p. F 10 ppm 400 Hz – 1 k. Hz 10 p. F 10 ppm 200 Hz – 1 k. Hz 100 p. F, 1000 p. F 20 ppm 200 Hz – 1 k. Hz 0. 005 – 0. 01 F 50 ppm 200 Hz – 1 k. Hz 0. 05 – 0. 1 F 50 ppm 200 Hz – 1 k. Hz 0. 1 – 1 F 10 ppm 10 k. Hz 10 p. F, 1000 p. F 100 ppm 10 k. Hz 0. 01 F 200 ppm 10 k. Hz 0. 1 F 22
GPS Positioning Uncertainties and Signals GPS APPROACH Standard Positioning Service (SPS) Navigation Uncertainty Estimate GPS SIGNALS L 1 C/A Code 30 - 100 m X 1 - 10 m X Precise Positioning Service (PPS) Navigation 1 - 10 m X L 1 Carrier Phase 0. 1 m X L 1, L 2 Carrier Phase 0. 01 m X SPS Differential 10/20/2021 L 1 P Code L 1 Carrier X L 2 P Code X X X 23
UTC(A)-UTC(B)=[UTC(A)-GPS-d. SA] – [UTC(B)-GPS-d. SB]= UTC(A) - UTC(B) – (d. SA-d. SB) 10/20/2021 24