TPC parallel tracking and Particle Identification Marian Ivanov











 n n Dependence of the reconstructed cluster position as function")






 After")






")








 Momentum resolution")

- Slides: 38
TPC parallel tracking and Particle Identification Marian Ivanov, Karel Safarik, Juri Belikov 24. 03 Marian Ivanov, CHEP 03
Alice TPC n n Time Projection chamber – main tracking device of the Alice central barrel Main tasks n n n Track finding Momentum measurements Particle identification by d. E/dx
Alice TPC n Geometrical features: n Drift region: n n Cylindrical vessel Length = 250+250 cm Rin/Rout ~87/252 cm Readout chambers n n 2× 18 sectors (72 chambers) Sector opening angle 20 degrees Pad shapes 7. 5 x 4, 10 x 6 and 15 x 6 mm ~ 0. 5 million pads Time sampling ~ 445 time bins per pad ~220 million samples per event
TPC simulations n Physical processes: n n n Relevant GEANT processes Diffusion Gas gain fluctuation Ex. B effect Responses in time and pad direction (2 D) noise
TPC tracking n First TPC tracking 1997 n n Iouri Belikov, Boris Batyunya, Karel Safarik Based on Kalman filtering approach “offline” tracking Parallel development n n n Bergen group Hough transform – global approach “online” tracking – only “almost” primary particles
Kalman filter n Advantages: n n n simultaneous track recognition and reconstruction matrices not more then 5 x 5 natural way to take into the account multiple scattering possibility to take into the account mean energy losses efficient way to match tracks between several detectors Shortcomings: n n track seeds should be provided clusters have to be reconstructed before tracking n n problem with high occupancy (up to 40 %) Main problems n n n cluster unfolding non gaussian error of cluster position tracking “fast points” – 99% => 90 % with all physical processes
New tracking Maximal Information principle Use everything what you can ==> You get the best Why? You can't use more Problem – too many degrees of freedom (~220 million 10 bits samples Compromise – looking for orthogonal parameters Parallel Kalman Filter tracking approach chosen To allow to use optimal combination of local and global information about track's and clusters Global tracking approach (Hough transform) considered only as seeding for track candidates
New cluster finder Cluster finder looks for local maxima in two dimensional time x pad-row plane Neighbourhood - matrix 5 x 5 with maxima at central bin 5 x 5 is bigger then typical size of cluster Standard centre of gravity and RMS used to characterize cluster Problem Systematic error due to the threshold effect
New cluster finder n Parameterization of the cluster shape n Depend on the track parameters n Z position – gives the diffusion component n n Θ angle – gives the z angular component n n Known during clustering for primary particles φ angle – depend on the pad row radius and particle momentum n n Known only during tracking Conservative approach – supposing 0 degree – good for high pt tracks
New cluster finder “RMS” fitting of the cluster Virtual charge added signal below threshold replaced by expected value according parametrized interpolation if bigger replaced with amplitude equal to threshold Signal shape (RMS) used for later error estimation - and as a criteria for cluster unfolding Gives comparable results with Gaussian fit of the cluster, but is much faster
Cluster unfolding If one of the RMS's – in time or pad direction is bigger then critical RMS - unfolding Fast spline method for unfolding Charge conservation Small systematic effect Supposing the same signal shape – equivalent to the same track angles – if not fulfilled – tracks diverge very rapidly
Spline unfolding (standalone simulator) n n Dependence of the reconstructed cluster position as function of the distance to the next cluster RMS of clusters – 0. 75
Cluster characteristic f. Y, f. Z centre of gravity f. Sigma. Y, f. Sigma. Z shape of the cluster in case of overlapped clusters – characterize cluster background f. Max, f. Q Signal at the maximum – respectively total charge in cluster f. CType Cluster type - characterize overlap factor
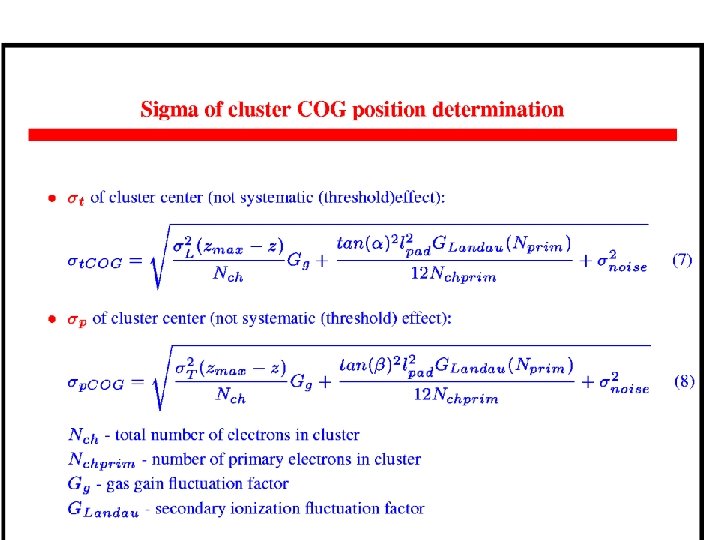
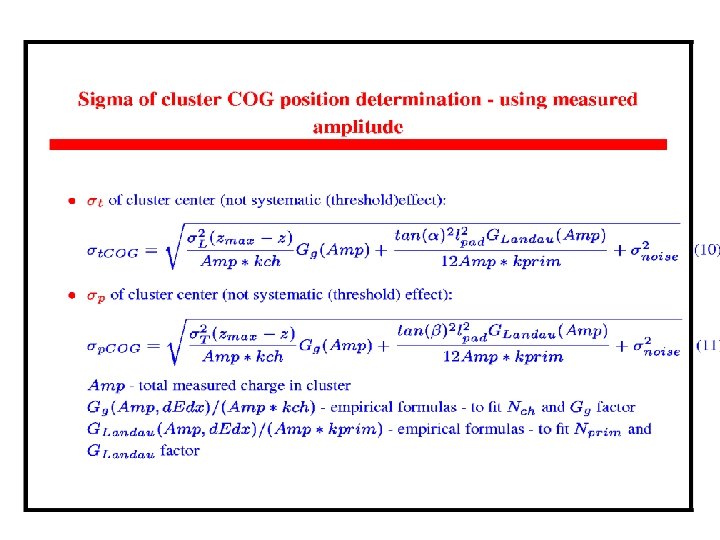
Cluster error estimation Errors estimated only during tracking Using cluster shape information cluster amplitude type of the cluster – is gold-plated or overlapped track angles and position is shared info (not yet implemented) Error parameterization Different for different pad geometries
Cluster error estimation n n Previous parameterization used for “gold-plated” clusters Overlapped clusters n n n Additional correction as function of the distortion from expected size Edge clusters taken separately Error parameterization principle n Make Gaussian pulls with unite sigma
Seeding with vertex constrain Seeding 2 times 1 seeding - 90 % of tracks are found 2 seeding - 6. 7 % additional found Problems N 2 problem (2 minutes of CPU) Vertex constrain suppress secondaries Solution ? Seeding using polynomial fit without any assumption on vertex position
Seeding without vertex constrain Simple track follower Algorithm Seeding between pad-row i 1 and i 2 – start in the middle pad-row Take cluster at middle pad-row Find 2 nearest up and down – make linear fit Find prolongation Take next 2 nearest - update fit - prolongation. . After 7 cluster - make polynomial fit. . . continue
Tracking 2 seedings with constrain + few seedings without at different radii (necessary for kinks) Tracking - parallel Find for each track the prolongation to the next pad-row Estimate the errors Update track according current cluster parameters Track several track hypothesis in parallel Allow cluster sharing between different tracks
Removing track hypothesis Remove-Overlap – called 3 times After seeding (threshold =50 %) After tracking outer sectors (threshold =50 %) After tracking inner sector (threshold =50 %) Effect (full event) New tracker - 3 fakes Old tracker - 7 fakes
d. Edx Truncated mean – 60 % Currently signals at cluster maximum Shared clusters not used at all Correction function for cluster shape Function of ratio of measured cluster shape to expected cluster shape
Comparison of new tracking and old tracking n Full event d. N/dy compared – Hijing parameterization n n efficiency comparison for primaries d. Edx comparison for primaries efficiency comparison for primaries +secondary crossing full TPC d. Edx comparison for primaries +secondary crossing full TPC
old tracking new tracking
old tracking new tracking
old tracking new tracking
old tracking new tracking
TPC PID separation (primaries)
Efficiency as function of pt
Efficiency as function of pt
Efficiency as function of pt
Efficiency as function of pt
Pt resolution as function of pt
Pt resolution as function of pt
Pt resolution as function of pt
Pt resolution as function of pt
Conclusion New tracking developed Efficiency improvement (for primaries ~ 96%, before ~90%) Momentum resolution improvement 20% - pt Angular resolution improvement 30 % - φ 7%-θ d. E/dx resolution – 6. 8 % full event (8. 7 % before) Seeding for secondary added
Outlook n Current approach - as a first iteration n n Clustering without tracks information Tracking several hypothesis Second iteration – unfolding of cluster using overlapped tracks information TPC data lossy compression n n requirement – conserve cluster shape first optimistic results – additional compression factor 60 %