Machining of Curved Geometries Knee joint prothesis Intake






; y =")
; y =")


; y =")
; y =")




; y =")



; y = g (u, w);")
; y = g (u, w);")




 p(u, 0) Input Two curves p(u, 0), p(u, 1) p(u,")
 p(1, 0) p(1, 1) p(0, 0)")
 Four Corner Points p(0, 0), p(1, 0), p(0, 1), p(1,")
")

- Slides: 43
Machining of Curved Geometries • • Knee joint prothesis • Intake manifold • Impeller Forging die for Blade • Pelton cup • Pinion
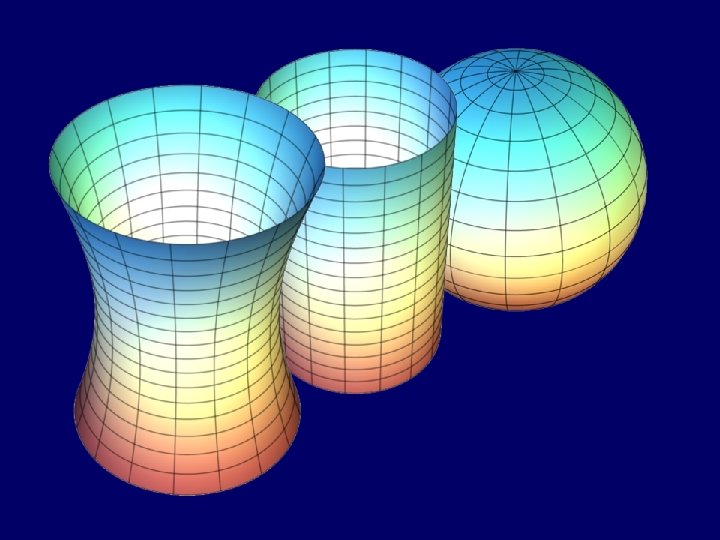
PARAMETRIC SURFACES Surfaces of Known Form • Plane surface • Cylindrical surface • Conical surface • Spherical Surface • Toroidal Surface
PARAMETRIC CURVES Parametric Representation of Curve x = f ( u ); y = g( u ); z = 0; 0 u 1. 0 u=1 u=0
PARAMETRIC CURVES Parametric Representation of Curve x = f ( u ); y = g( u ); z = 0; 0 u 1. 0 u=1 u=0
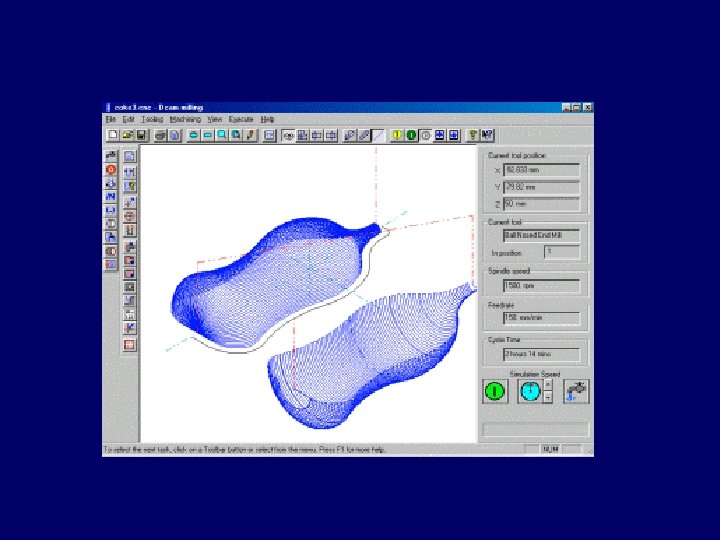
CNC Programming
CNC Programming
OFFEST CURVE Parametric Representation of Curve x = f ( u ); y = g( u ); z = 0; 0 u 1. 0 pu = dx dy du 0 du dx du 0 pn = -
OFFEST CURVE Parametric Representation of Curve x = f ( u ); y = g( u ); z = 0; 0 u 1. 0 pn n = pn = nx ny 0 Parametric Representation of Offset Curve X = f ( u ) + nx r Y = g( u ) + ny r Z = 0
Machining of Curved Geometries
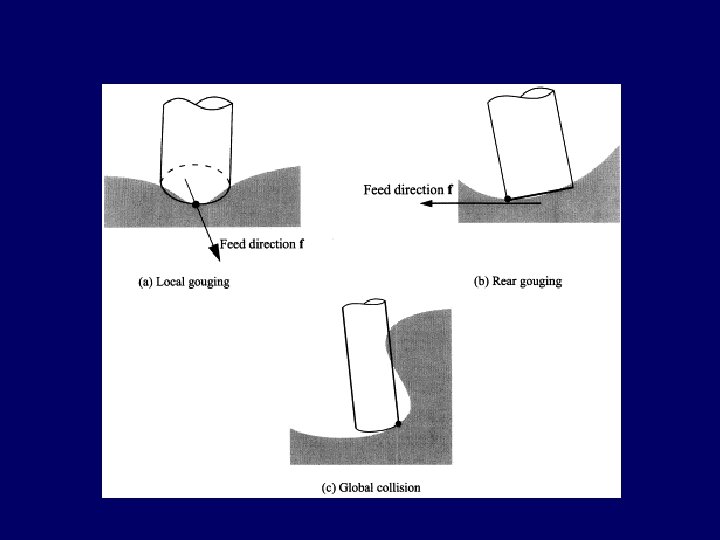
CNC Programming
CNC Programming Gouging
CNC Programming 1 kmax= rmin
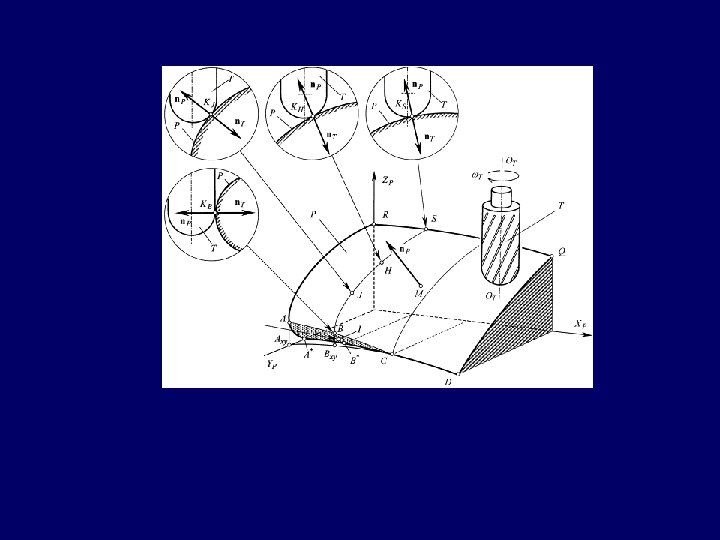
TOOL SELECTION Parametric Representation of Curve x = f ( u ); y = g( u ); z = 0; 0 u 1. 0 pu = dx du dy du 0 (pu x puu ). (pu x puu) k 2 = puu = d 2 x du 2 d 2 y du 2 0 (pu. pu)3
PARAMETRIC SURFACES Surfaces of Known Form • Plane surface • Cylindrical surface • Conical surface • Spherical Surface • Toroidal Surface
w u
PARAMETRIC SURFACES Flat End Mill Ball End Mill
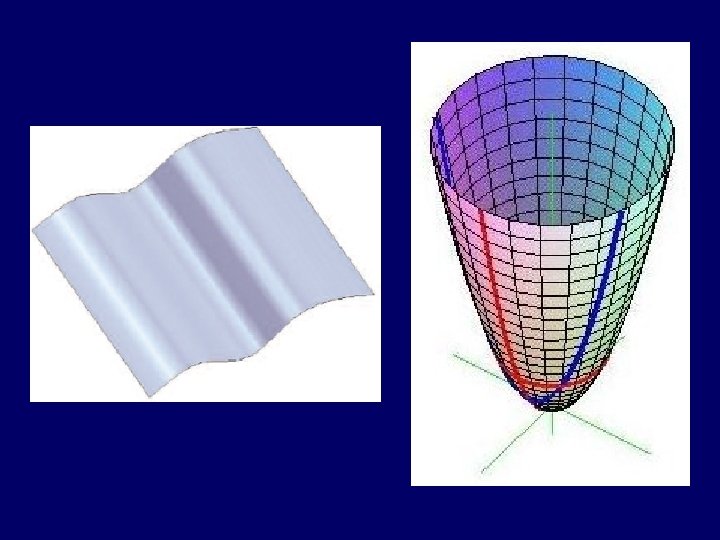
FREE-FORM SURFACES Parametric Surface x = f (u, w); y = g (u, w); z = (u, w); 0 u 1. 0; 0 w 1. 0 δx pu = δy δz δx δu δu δu pw = δy δz δw δw (pu x pw ) n = (pu x pw) δw Offset Surface X = f (u, w) + nx. r; Y = g(u, w) + ny. r; Z = (u, w) + nz. r; 0 u 1. 0; 0 w 1. 0
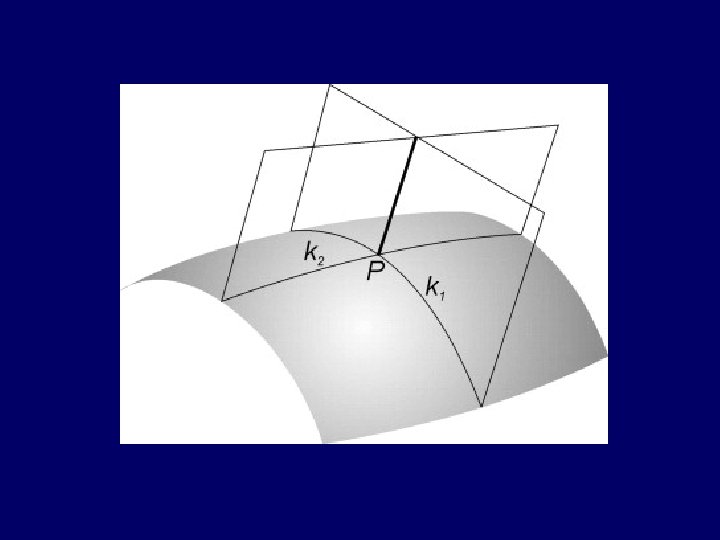
FREE-FORM SURFACES Parametric Surface x = f (u, w); y = g (u, w); z = (u, w); 0 u 1. 0; 0 w 1. 0 E = (pu. pu ) 2 ) (LN – M u w F = (p. p ) = k 1 k 2 K = (EG – F 2 ) G = (pw. pw ) L = (puu. n ) (EN + GL -2 FM) = 0. 5(k 1 + k 2) M = (puw. n ) H = 2 ) 2 (EG – F ww N = (p. n ) (pu x pw ) n = (pu x pw)
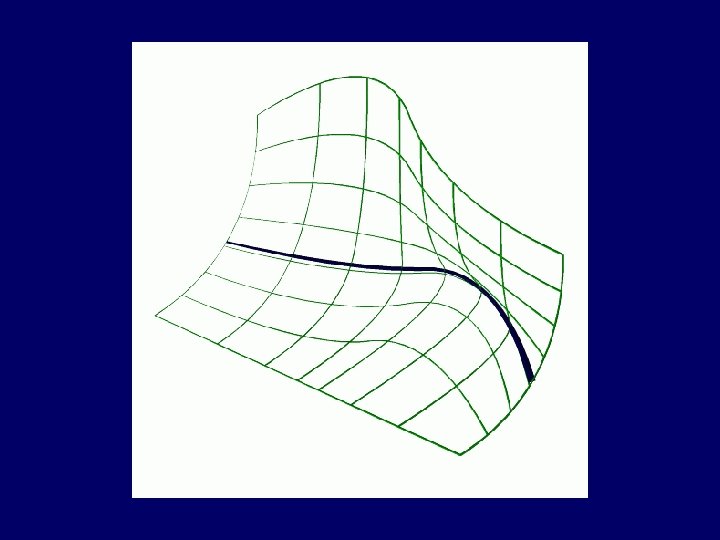
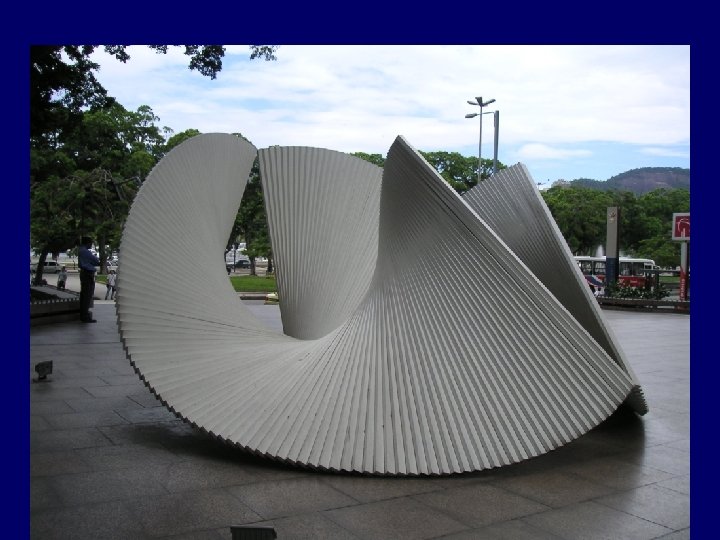
RULED SURFACE p(u, 1) p(u, 0) Input Two curves p(u, 0), p(u, 1) p(u, w) = (1 -w) p(u, 0) + w p(u, 1)
BILINEAR SURFACE p(0, 1) p(1, 0) p(1, 1) p(0, 0)
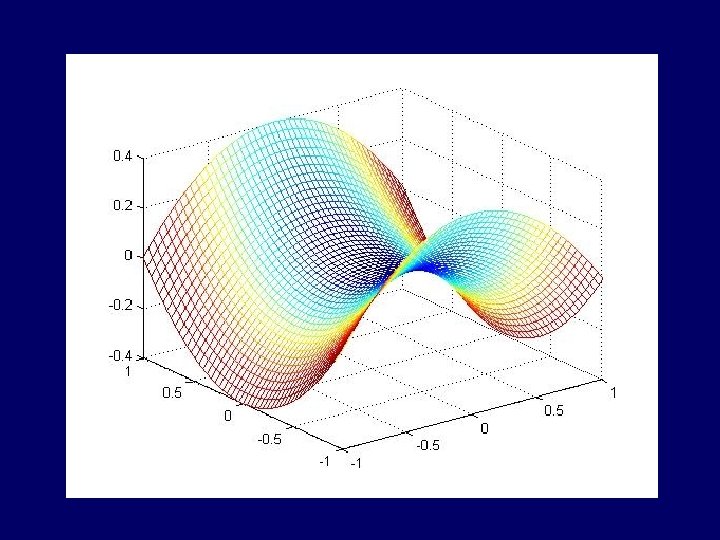
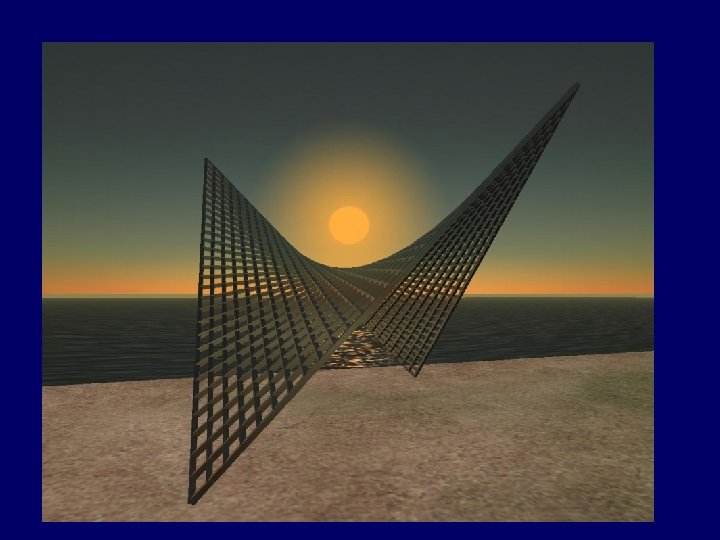
BILINEAR SURFACE (HYPERBOLIC PARABOLOID) Four Corner Points p(0, 0), p(1, 0), p(0, 1), p(1, 1) p(u, w) = (1 -u) (1 -w) p(0, 0) + u (1 -w) p(1, 0) + (1 -u) w p(0, 1) + u w p(1, 1)
BILINEAR SURFACE (HYPERBOLIC PARABOLOID)