The work of Peter Crouch the control theorist















 approaches 0 the cost is upper bounded by the")



- Slides: 20
The work of Peter Crouch the control theorist* Conference on Decision and Control December 11, 2011 Canonical Geometrical Control Problems: New and Old Roger Brockett Engineering and Applied Sciences Harvard University *Not to be confused with the bad-boy English footballer of Tottenham Hotspur, Stoke City, Abigail Clancy, etc.
Peter Crouch: The reason we are here! Some of my early interactions: The London NATO meeting– September, 1973 Student at Harvard, 1974 -1977: Thesis: “Dynamical Realizations of Finite Volterra Series” It showed that the natural state space for a finite Volterra series is diffeomorphic to Rn Cohort included P. S. Krishnaprassad and Joseph Ja’ Ja” Sabbatical at Harvard in 1982
Peter Crouch at the Center: From the Web
Some Lie Theoretic, Least Squares, State Transfer Problems involving Z 2 Graded Lie Algebras
The first two have finite Volterra series
Recall
What about regulator versions of these systems?
What it Approximates
Our Quadratic Regulator Problem
The Euler-Lagrange Equations We need to factor the linear operator into a stable and unstable factors. The value of x(0) is given. Its derivative is to be determined so as to put x on the right submanifold
Factoring the Euler-Lagrange Equation This is from the zeroth order term. This is from the first order term. Formula for Z
Relating Properties of x and Z through Q It is important that we are now dealing with initial values Theta and Q are functions of x(0) and Z(0). -
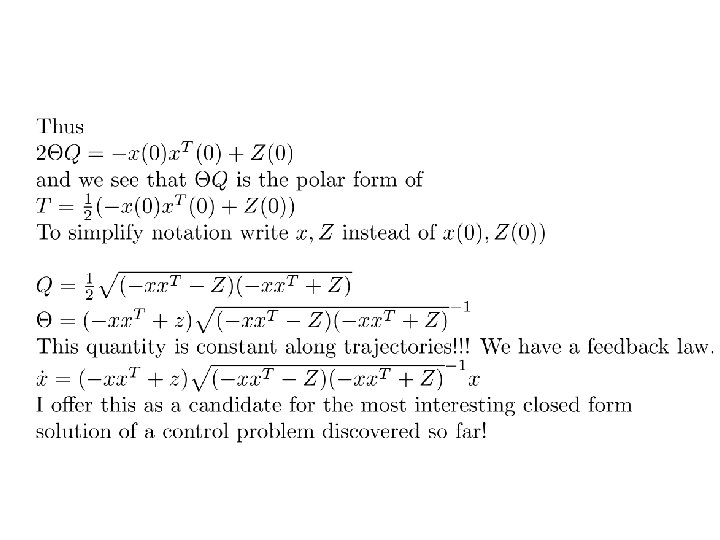
Here we first define the optimal trajectory using initial conditions giving an open loop control. Actually it is true at all times and states! If considered as a “gain” is homogeneous of degree zero From the perspective of achieving the correct homogeneity, this is quite remarkable, even miraculous.
An Example These solutions are stable for all $a$ and generate a Z displacement.
A Further Elaboration
A Further Elaboration As x(0) approaches 0 the cost is upper bounded by the cost of the u-only optimal trajectory. However, this cost is not differentiable on the “Z axis”.
As for the Cost---
This is not a dead end—Many more possibilities
Peter--Congratulations on a distinguished career based on talent, hard work, discipline, service to the community.