Sistemas de Viso Artificial Prof Francisco A C





























- Slides: 30
Sistemas de Visão Artificial Prof. Francisco A C Pinto – DEA/UFV Pós-colheita e Qualidade de Frutas e Hortaliças
Sistema de Visão Artificial Utilização de imagens digitais para fins de automação de processos Cor Dimensões Forma Defeitos. . .
Por que imagens digitais ? n Bill Gates ? n É chique ? Ou Chico ? n Angústia moderna do homem ?
Visão Artificial n n Aquisição Processamento Análise Atuadores
Aquisição
Aquisição – Resposta Espectral do Sensor
Aquisição – Resposta Espectral do Produto
Aquisição – tipo de imagem n n n Binária Monocromática Colorida RGB Color-NIR Hyperspectral
Aquisição – tipo de imagem n n n Binária Monocromática Colorida RGB Color-NIR Hyperspectral
Aquisição – tipo de imagem n n n Binária Monocromática Colorida RGB Color-NIR Hyperspectral
Aquisição – tipo de imagem n n n Binária Monocromática Colorida RGB Color-NIR Hyperspectral
Aquisição – tipo de imagem n n n Binária Monocromática Colorida RGB Color-NIR Hyperspectral
Aquisição – tipo de imagem n n n Binária Monocromática Colorida RGB Color-NIR Hyperspectral
Aquisição – tipo de imagem n n n Binária Monocromática Colorida RGB Color-NIR Hyperspectral
Aquisição – tipo de imagem n n n Binária Monocromática Colorida RGB Color-NIR Hyperspectral
Aquisição – tipo de imagem n n n Binária Monocromática Colorida RGB Color-NIR Hyperspectral
Aquisição – tipo de imagem n n n Binária Monocromática Colorida RGB Color-NIR Hyperspectral
Processamento n n n Retirada de ruídos Melhoria da qualidade da imagem Segmentação do objeto de interesse
Análise n n n Retirada da informação desejada Técnicas de Inteligência Artificial Classificação de objetos na imagem 69% de flores 0, 03 – índice de distribuição
Análise – Redes Neurais
® MERLIN vision system University of Maryland Maçã, pêssego, pêra, tomate e laranja Maçã – 44 ton/h
Colour Vision System
Estudo de caso: n n Sistema de visão artificial para classificação de frutas e hortaliças http: //ss. jircas. affrc. go. jp/engpage/jarq /32 -4/nagata. htm
Etapa 1: Definir o problema Classificação quanto a forma: A, B e C Classificação quanto ao tamanho: 3 L, L, M e S
Etapa 2: definir os atributos Saída do processamento K 1 = W 1/ Wmax K 2 = W 2/ Wmax K 3 = W 3/ Wmax K 4 = W 4/ Wmax K 5 = H/ Wmax K 6 = L/H
Etapa 3: Definir o método de análise
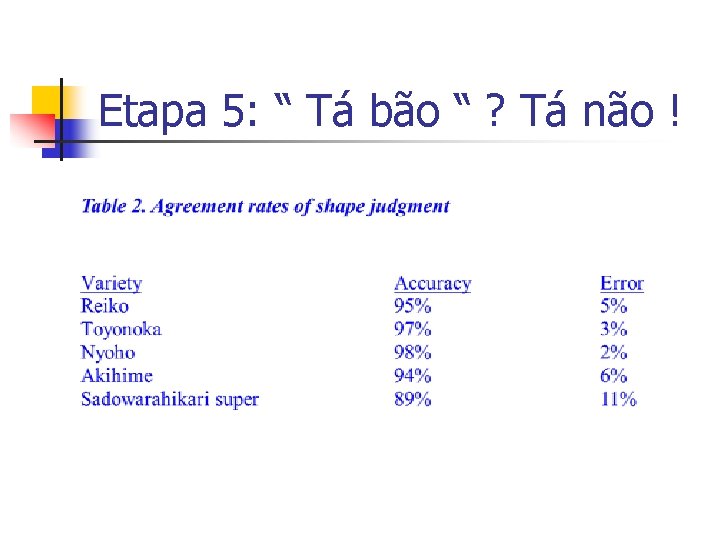
Etapa 4: desenvolver e testar o sistema
Visão Artificial na Agricultura n n n Seleção e classificação de produtos agrícolas (principalmente frutas) Comportamento animal Robotização da colheita n n n Posicionamento de implementos agrícolas Direção automática Identificação de doenças, pragas, plantas invasoras, . . . (sensoriamento remoto)
Visão Artificial na UFV n n n ENG 634 – Engenharia de Sistemas Agrícolas ENG 639 – Processamento de Imagens Digitais Laboratório de Projeto de Máquinas e Visão Artificial n n n Engenharia Agrícola Fitopatologia Solos