SEL 329 CONVERSO ELETROMEC NICA DE ENERGIA Aula

 3.")

 -A letra de código especifica limites para da")
")




Partida estrela delta MIT 2 2 1")

Usando autotransformador abaixador VL VLmotor = VL/aa. T")

Usando autotransformador abaixador - A mudança da configuração deve ser feita quando a velocidade")
Colocando resistências adicionais no rotor (rotor bobinado) s=1 (partida) I 1 = IM +I")
Colocando resistências adicionais no rotor (rotor bobinado) - Não altera o torque máxima de")

Controle de velocidade variando a tensão terminal - O Torque é proporcional ao quadrado")
Controle de velocidade aumentando a resistência no rotor - Aumenta as perdas (baixa eficiência)")
Usando conversor de frequência - Permite um controle quase linear -Ampla faixa de variação")
Usando conversor de frequência Pode demonstrar-se que nos arredores do ponto de operação, o")
Usando conversor de frequência Como VTH V sinc= 2 pi f y Mantendo V/f")










- Slides: 36
SEL 329 – CONVERSÃO ELETROMEC NICA DE ENERGIA Aula 20 Partida e Controle de Velocidade do Motor de Indução
Tópicos abordados 1. Introdução 2. Partida de Motores de Indução (letra de código) 3. Controle de Velocidade de Motores de Indução 4. Especificações nominais do MIT 5. Tendências de Projeto de MIT
Introdução -A corrente de partida do MIT pode ser de 3 a 20 vezes a In M 1 M 2 . . . Rede elétrica Mn Partida de Motores em uma industria -Na maior parte das apliações é necessário variar a velocidade
Letra de código de partida (NEMA) -A letra de código especifica limites para da corrente de partida Spartida =Potência nominal em HP x letra de código de partida VT: tensão de linha
Letra de código de partida (NEMA)
Exemplo 1: Qual é a corrente de partida de um motor de indução trifásico de 15 HP, 208 V e letra de código F? Solução:
Exemplo 1: Qual é a corrente de partida de um motor de indução trifásico de 15 HP, 208 V e letra de código F? Solução: Spartida =15 HP x 5, 6 k. VA/HP = 84 k. VA
Exemplo 1: Qual é a corrente de partida de um motor de indução trifásico de 15 HP, 208 V e letra de código F? Spartida =15 HP x 5, 6 k. VA/HP = 84 k. VA A corrente de partida será:
Maneiras de reduzir a corrente de partida
a)Partida estrela delta MIT 2 2 1
Partida estrela delta - A tensão nas bobinas será: VL/3^0, 5 - A corrente de partida também reduz: Ipartida/3^0, 5 - A mudança da configuração deve ser feita quando a velocidade do motor estiver perto da nominal. - É necessário tiver acesso aos seis terminais - Só é possível se a operação final do motor for em Delta. - A corrente de partida é reduzida proporcional à queda de tensão e o conjugado de partida com o quadrado da tensão.
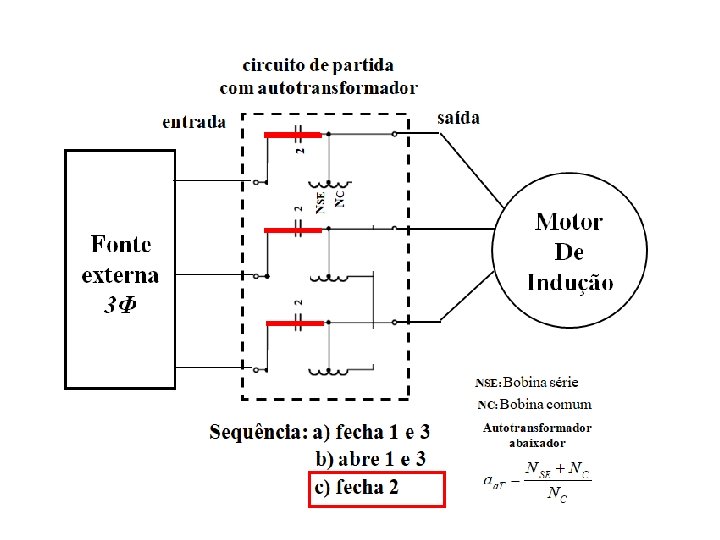
b)Usando autotransformador abaixador VL VLmotor = VL/aa. T
VLmotor VL VLmotor = VL/aa. T
b)Usando autotransformador abaixador - A mudança da configuração deve ser feita quando a velocidade do motor estiver perto da nominal. - A corrente de partida é reduzida proporcional à queda de tensão e o conjugado de partida com o quadrado da tensão.
c)Colocando resistências adicionais no rotor (rotor bobinado) s=1 (partida) I 1 = IM +I 2 Lembrando que: (corrente de partida de fase)
c)Colocando resistências adicionais no rotor (rotor bobinado) - Não altera o torque máxima de partida - Na partida é colocada uma resistência adicional (R 2 adic) elevada e após o regime elimina-se a resistência usando contator -A resistência R 2 adic pode ser calculado a fim que a Ipartida = Inominal - Só é possível em motor de rotor bobinado
Controle de velocidade do MIT
a)Controle de velocidade variando a tensão terminal - O Torque é proporcional ao quadrado da tensão -Permite uma pequena faixa de variação - Usado em motores pequenos Faixa de variação de velocidade
b)Controle de velocidade aumentando a resistência no rotor - Aumenta as perdas (baixa eficiência) -Permite uma pequena faixa de variação - Precisa de manutenção periódica - Só é possível em motor de rotor bobinado Faixa de variação de velocidade
c)Usando conversor de frequência - Permite um controle quase linear -Ampla faixa de variação de velocidade - O torque de partida diminuir pouco. - Limita a corrente de partida grandemente. - Custo elevado
c)Usando conversor de frequência Pode demonstrar-se que nos arredores do ponto de operação, o controle usando o conversor de frequencia é linear. 0 Próximo do ponto de operação s 0
c)Usando conversor de frequência Como VTH V sinc= 2 pi f y Mantendo V/f = cte: Controle linear x K também constante
Usando conversor de frequencia Torque de partida Faixa de variação de velocidade
Usando conversor de frequencia Deve-se manter a relação V/f = cte para não saturar o núcleo para velocidades inferiores a velocidade nominal Para velocidades superiores a velocidade nominal, a tensão deve-se manter constante para não perder isolamento.
Especificações nominais do MIT e dados de placa
A B C D NEMA
Norma internacional NEMA Norma no Brasil ABNT NBR 17094 e IEC 60034 -1
Especificações nominais do MIT O limite de tensão do motor baseia-se na máxima corrente de magnetização. Não pode ultrapassar o nominal para não saturar o núcleo, nem para não perder isolação das bobinas. A máquina poderá operar a freqüência inferior, mas é necessário manter a relação V/f = cte para não saturar o núcleo. Neste caso a potência também diminuirá na mesma proporção. A máquina poderá operar a frequencias superiores à nominal, porém a tensão terminal não poderá ultrapassar seu valor nominal. A corrente nominal não poderá ultrapassar o valor nominal para não aquecer o estator e perder via útil. As classes de isolamento nos enrolamentos do rotor para MIT é o mesmo do utilizado em Geradores Síncronos. Em geral, todas as considerações feitas dos valores nominais do Gerador Síncrono valem para o MIT.
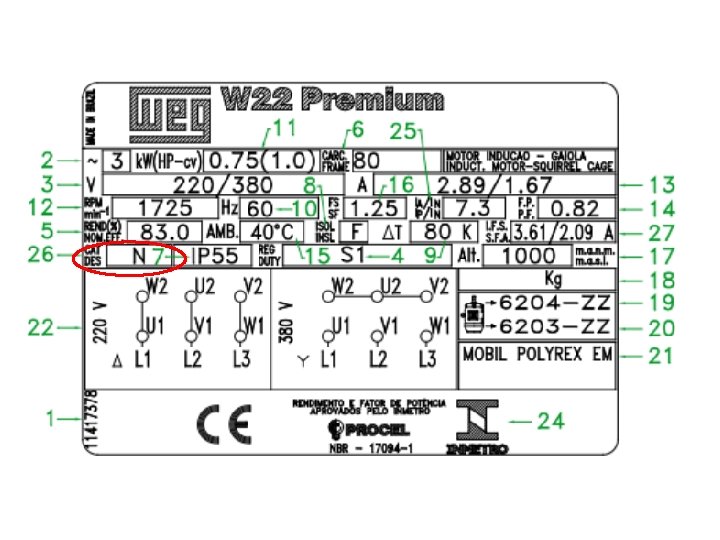
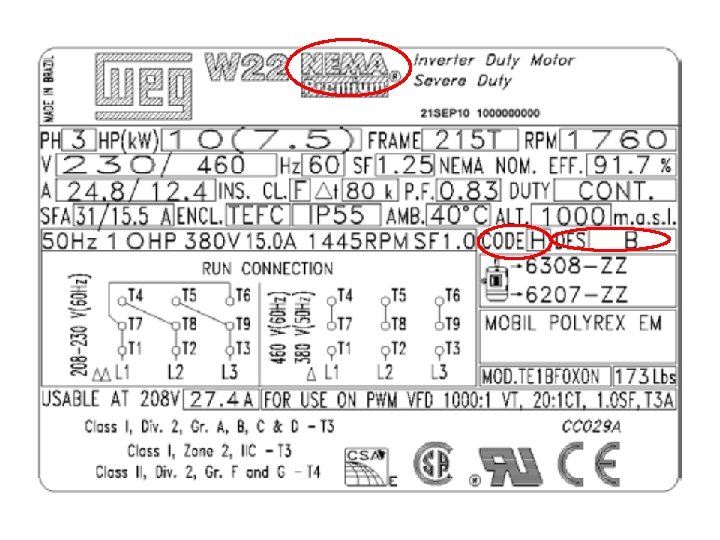
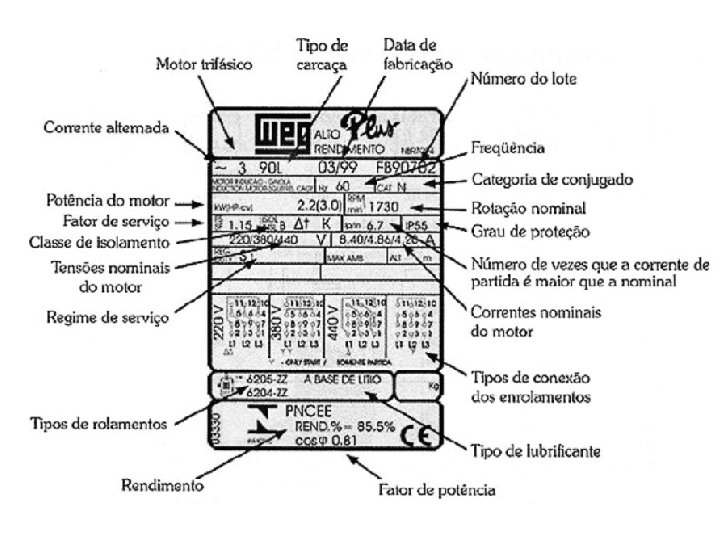
Especificações nominais nos dados de placa
Tendências de Projeto de Motor de Indução
Tendências de Projeto de Motor de Indução 7. Uso de supercondutores para aumentar a eficiência (pesquisa)
Tendências de Projeto de Motor de Indução