Optimizer Solution Algorithms Mathematical ProgrammingMP Optimality CriteriaOC Gradientbased
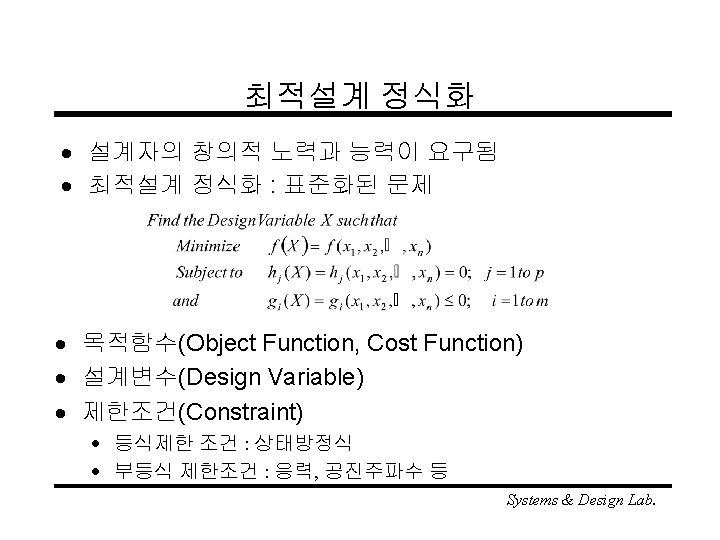
 – Mathematical Programming(MP) – Optimality Criteria(OC) · 설계")
최적설계 Optimizer · 해 알고리듬(Solution Algorithms) – Mathematical Programming(MP) – Optimality Criteria(OC) · 설계 민감도 계산 – Gradient-based Algorithms – Design Sensitivity Analysis of Structural Systems : E. J. Haug · 위상(Topology) 및 형상(Shape) 최적설계 Systems & Design Lab.
 vs. Indirect Method(OC) Systems & Design Lab.")
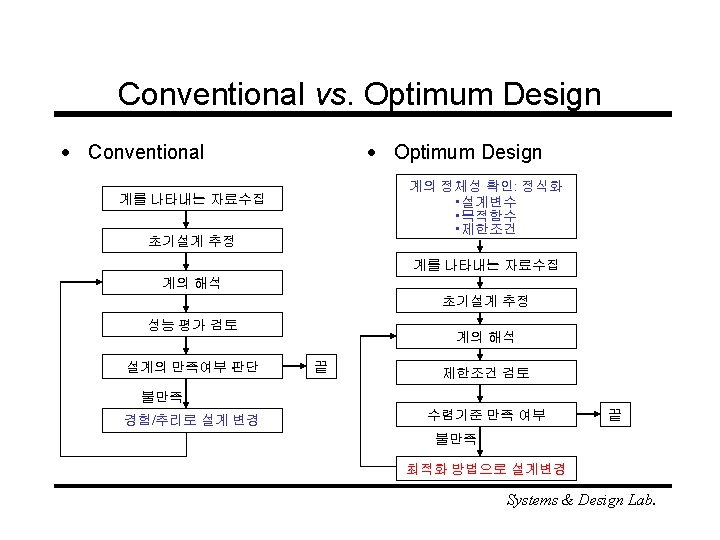
최적화 해법 알고리듬 · Direct search(MP) vs. Indirect Method(OC) Systems & Design Lab.
 · Minimum – Local(Relative) or Global(Absolute) Minimum ? B D F A")
Fundamental Concepts(1) · Minimum – Local(Relative) or Global(Absolute) Minimum ? B D F A E C Systems & Design Lab.
 · Gradient Vector – Normal to the tangent plane – Direction of")
Fundamental Concepts(2) · Gradient Vector – Normal to the tangent plane – Direction of Maximum Increase Systems & Design Lab.
 · Hessian Matrix – Symmetric Matrix Systems & Design Lab.")
Fundamental Concepts(3) · Hessian Matrix – Symmetric Matrix Systems & Design Lab.
 · Taylor Series Expansion – 모든 함수는 임의의 점 근방에서 그 점과")
Fundamental Concepts(4) · Taylor Series Expansion – 모든 함수는 임의의 점 근방에서 그 점과 미분값을 사용한 다 항식(Taylor Series) 근사가 가능 – 변화량의 근사 • 일차 (First-Order) 근사vs. 이차(Second-Order) 근사 Systems & Design Lab.

OC for Unconstrained Problems · Local Optimality Condition · Necessary Condition · Sufficient Condition Systems & Design Lab.
 Necessary Condition")
OC for Constrained Problems · · Lagrange Multiplier: u, v · Kuhn-Tucker(K-T) Necessary Condition Systems & Design Lab.

Optimality Criteria Method · Procedure of Optimality Criteria Method 1. Write the necessary conditions 2. Solve the nonlinear equation · Inappropriate for many Engineering Problems – Large Design Variables and Constraints – The Cost and Constraint Function can be Highly Nonlinear – The Design Variables can be Implicit in the Cost and Constraint Functions Systematic Numerical Methods are Needed Systems & Design Lab.
 ·")
LP Method for Optimum Design · NLP can be solved by Sequential LP(SLP) · Standard Linear Programming Problem – Linear Cost Function – Linear Equality Constraint – Non-negativity of Design Variables • Slack and Surplus Variables – Systems & Design Lab.

Linear Programming Problems · Basic Concepts – Feasible Solution • 제한조건과 비음수 조건을 모두 만족하는 해 – Optimum Solution • Feasible Solution중 목적함수를 최소화하는 해 – LP 문제의 Optimum Solution은 Feasible Region 경계면 꼭지 점(Vertex Point)에 존재한다. Simplex Method B A C D Systems & Design Lab.
 points")
LP: Simplex Method · Simplex in n-dimensional Space – Convex hull of (n+1) points which don’t lie on one hyperplane – 2차원인 경우 삼각형이 됨 · Graphical Interpretation B A C D Systems & Design Lab.
 · General Algorithm – Iterative Method – – – Step")
Numerical Methods for UOD(1) · General Algorithm – Iterative Method – – – Step Size & Search Direction – Descent Direction – Gradient Evaluation • Finite Difference Method • Analytic Method – Sensitivity Analysis Systems & Design Lab.
 · Step Size Determination – One-dimensional minimization – Equal Interval")
Numerical Methods for UOD(2) · Step Size Determination – One-dimensional minimization – Equal Interval Search • Reducing Interval of Uncertainty – Golden Section Search • Variable Interval Search Method • – Polynomial Interpolation • Quadratic Curve Fitting Systems & Design Lab.
 · Steepest Descent Method – Steepest Descent Direction – One-dimensional")
Numerical Methods for UOD(3) · Steepest Descent Method – Steepest Descent Direction – One-dimensional Search – Simple and Robust(수렴보장) – Drawbacks • The rate of Convergence is slow – Orthogonal Paths – Scaling of Design Variables Systems & Design Lab.
![Numerical Methods for UOD(4) · Conjugate Gradient Method – Fletcher & Reeves[1964] – Conjugate](http://slidetodoc.com/presentation_image_h/e2729e9a182812bdb05854e305fda7ff/image-25.jpg "Numerical Methods for UOD(4) · Conjugate Gradient Method – Fletcher & Reeves[1964] – Conjugate")
Numerical Methods for UOD(4) · Conjugate Gradient Method – Fletcher & Reeves[1964] – Conjugate Gradient Direction : Modification of SDM • • Not orthogonal to each other – Simple & Fast Convergent Rate – Restart for Computational Stability Systems & Design Lab.
 · Newton’s Method – Optimality Criteria for Second-order Taylor Series")
Numerical Methods for UOD(5) · Newton’s Method – Optimality Criteria for Second-order Taylor Series – Second-Order Derivative : High Cost – Quadratic Rate of Convergence : Not guaranteed – Memory-less Method Systems & Design Lab.
 · Quasi-Newton Method – Steepest Descent Method : Convergent But")
Numerical Methods for UOD(6) · Quasi-Newton Method – Steepest Descent Method : Convergent But Slow – Newton’s Method : Fast But Expensive – Hessian Matrix Approx. by First-Order Derivative History – Davidon-Fletcher-Powel Method[1963] • Approximate Inverse of Hessian Matrix • One of the Most Powerful Algorithm for general function – Broyden-Fletcher-Goldfarb-Shanno Method[1981] • Approximate the Hessian Matrix Systems & Design Lab.
 · Sequential Unconstrained Minimization Techniques – Minimization of Penalty or Barrier")
Constrained Optimum Design(1) · Sequential Unconstrained Minimization Techniques – Minimization of Penalty or Barrier Function – Penalty Fn=Magnification factor*Violation · General Algorithms – Linearization of Cost and Constraint Functions – Sub-problem of Search Direction Determination – Solution of Sub-problem – Step Size Determination Systems & Design Lab.
 · · · · Sequential Linear Programming Algorithm Quadratic Programming Sub-problem")
Constrained Optimum Design(2) · · · · Sequential Linear Programming Algorithm Quadratic Programming Sub-problem Constrained Steepest Descent Method Constrained Quasi-Newton Method of Feasible Directions Gradient Projection Method Generalized Reduced Gradient Method Etc. Systems & Design Lab.
- Slides: 29