Object Detection D A Forsyth UIUC Detection with

Object Detection D. A. Forsyth, UIUC

Detection with a classifier • • Search • • all windows at relevant scales Prepare features Classify Issues • • • how to get only one response speed accuracy Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Detection with a classifier Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Non-maximum suppression • • • Compute “strength of response” • • SVM value LR value Threshold • small values are not faces Find largest value (over location, scale) • • suppress nearby values repeat Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

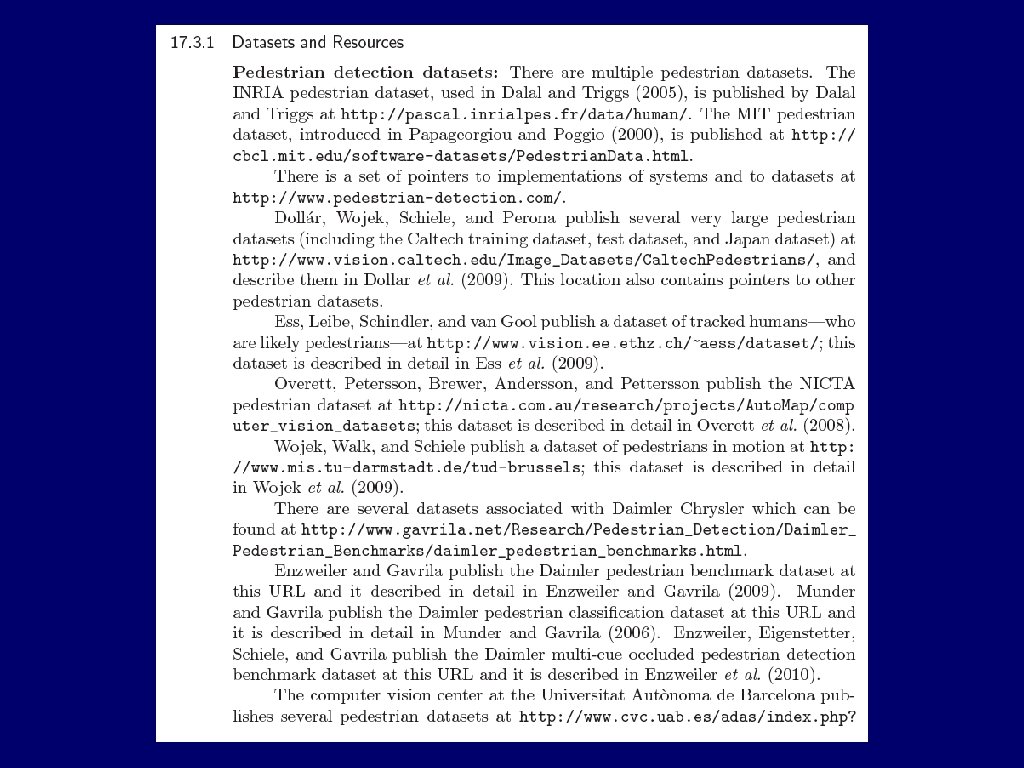
Core applications • • • Face detection • • now very successful for frontal faces less so for 3/4, profile views Pedestrian detection • eg make cars safer Generic object detection • explain pictures image search robotics applications surveillance applications • • • Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

In-plane rotation Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Fast Features for Faces Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Pedestrians: Scissors and Lollipops Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Visualizing Distinctive Features Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Detecting Object Boundaries • • • Mark boundaries in image Earlier approaches • • Segment image (previous slides) Find edges (previous slides) Now • • See this as detection problem Mark up image examples Rack up features; train classifier; run detector Detector score is known as Pb (“Probability of boundary”) Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Data Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Always do this first in detection problems • • Window features are HOG features Classifier is linear SVM Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Evaluation • • • False-positives per window • • fraction of windows presented to classifier that are false-positive difficulty different systems see different numbers of image windows (because they step in location, scale differently) • False-positives per image • • average no. of false positives per image presented to system advantage accounts for differences in number of detector windows • Plot miss rate against false-positive per image rate • there alternatives total error rate accuracy loss • • • Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Deformable objects • • This can be learned from training data Build several detectors for each object to cover, say, different views Each detector computes a score that is a sum of • local part scores • each is linear SVM+HOG • position scores for the local part http: //people. cs. chicago. edu/~pff/latent/ Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Evaluation • • Work with boxes • • • Put boxes around targets Detector reports boxes hit if overlap is good enough Recall, precision, AP measures for boxes Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Speed+Accuracy • • There are methods to reject some windows early • using simple tests Key to good performance seems to be • very large numbers of examples • and clever methods to train with huge numbers of negatives • careful feature engineering Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Geometric Consistency • Pedestrian detection example • • • There is a ground plane in pedestrian images True pedestrians have feet on plane, so below horizon smaller close to horizon in image larger far from horizon Horizon rules out many false positives If we know horizon, can prune pedestrians If we know pedestrians, can suggest horizon Results in improvements to detector performance. • • • Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Poselets • • • Object parts can give you a cue to where the object is eg • • • build detectors for bits of human body each votes for the location of the torso collect votes; location with highest set of votes is torso This works even if you can’t see the bit you’re looking for Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Poselets Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Poselets Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Visual Phrases • • • Sometimes it’s easier to detect complex groups of objects • • eg person riding horse most likely because pictures of people (resp. horses) on their own are highly variable but there’s not much a person can do on horseback • • Strategy • build detectors for complex groups that are easy to detect • how do we know it’s easy? test performance • build detectors for isolated objects as well • decode • for each detector, use other detector responses to decide whether to believe it Important open question: What should we try to detect? Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Visual phrases Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Summary • • • Simple detection strategy is quite effective • search windows, compute HOG, stick in classifier Can use somewhat more complex object models • makes things better For some objects, detection is quite effective Slides to accompany Forsyth and Ponce “Computer Vision - A Modern Approach” 2 e by D. A. Forsyth

Decoding

- Slides: 37