Numerics of ODEs Implicit and Explicit RungeKutta methods

![Runge–Kutta methods The matrix [aij] is called the Runge–Kutta matrix, while the bi and](https://slidetodoc.com/presentation_image_h/207973c602684c0060b28263d84547dd/image-3.jpg "Runge–Kutta methods The matrix [aij] is called the Runge–Kutta matrix, while the bi and")
")


![RKF 45 used by Maple E. Fehlberg [Computing 6 (1970), 61– 71] proposed and](https://slidetodoc.com/presentation_image_h/207973c602684c0060b28263d84547dd/image-16.jpg "RKF 45 used by Maple E. Fehlberg [Computing 6 (1970), 61– 71] proposed and")
")



- Slides: 30
Numerics of ODEs Implicit and Explicit Runge-Kutta methods
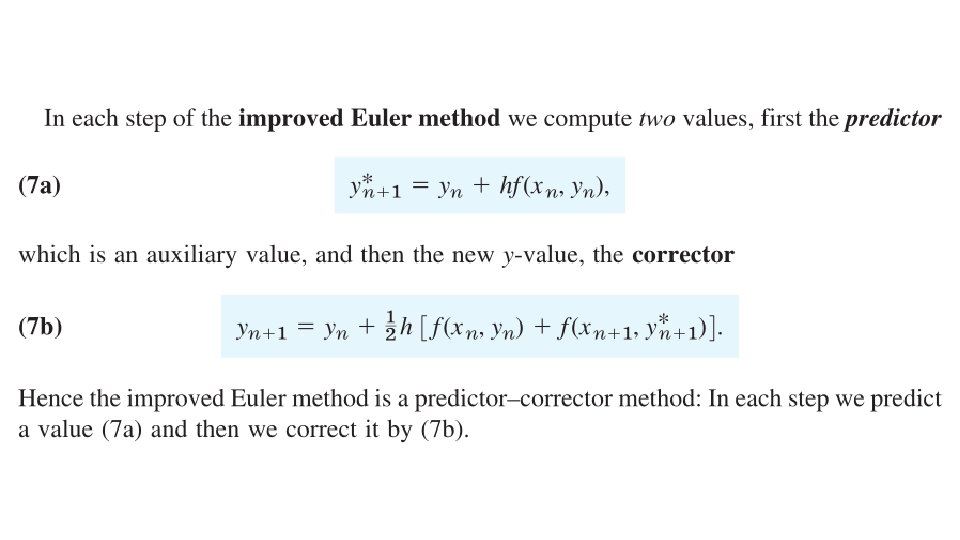
Runge–Kutta methods The matrix [aij] is called the Runge–Kutta matrix, while the bi and ci are known as the weights and the nodes. These data are usually arranged in a mnemonic device, known as a Butcher tableau.
Gauss–Legendre method of order 4 (implicit)
Explicit Runge–Kutta methods
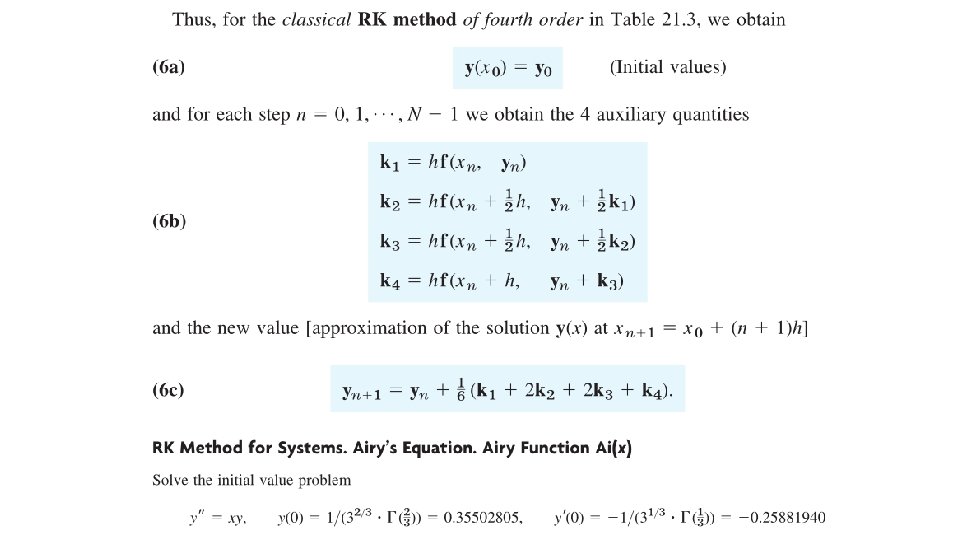
Classical Runge-Kutta: RK 4 = Simpson’s rule generalized
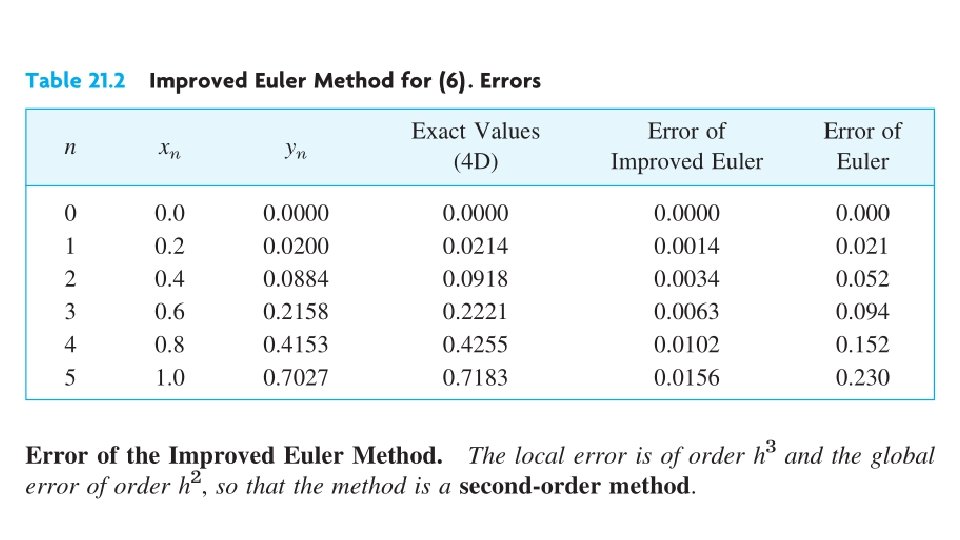
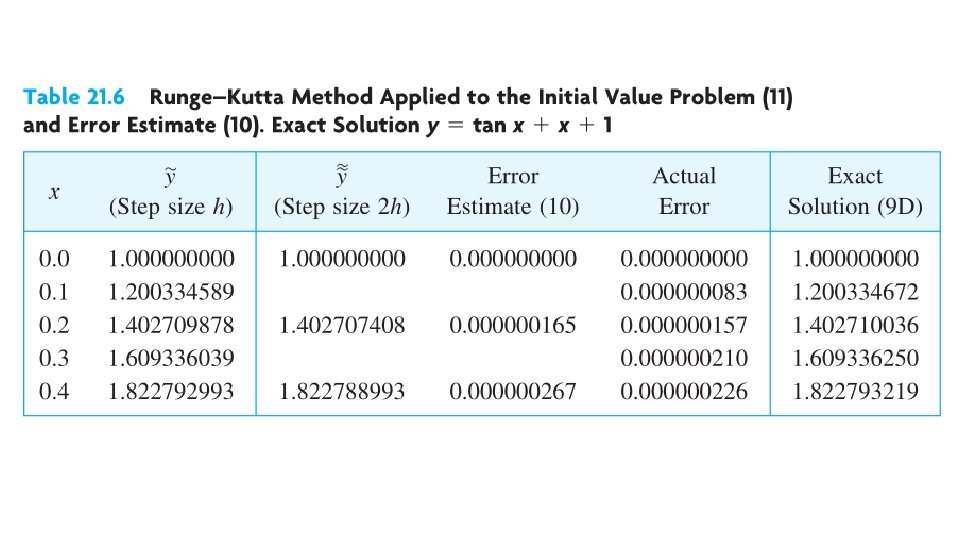
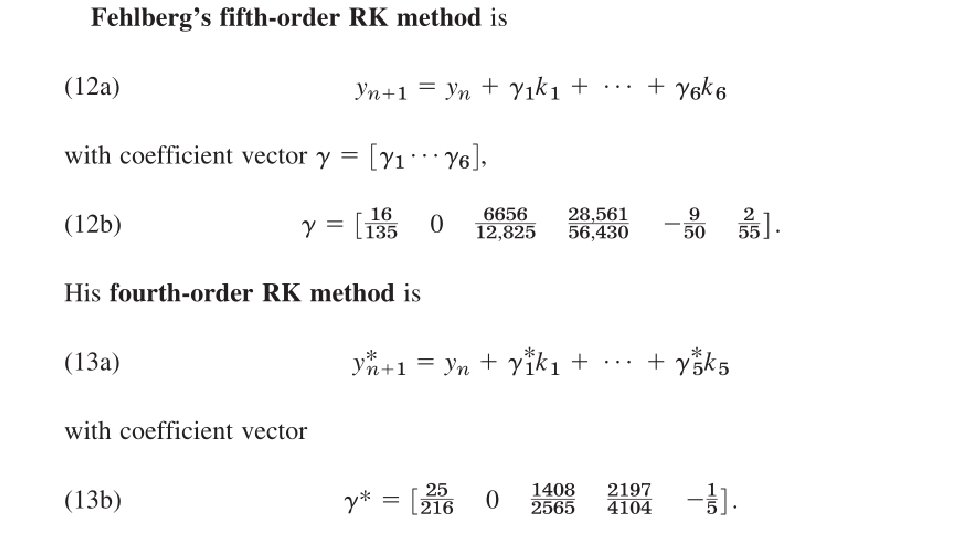
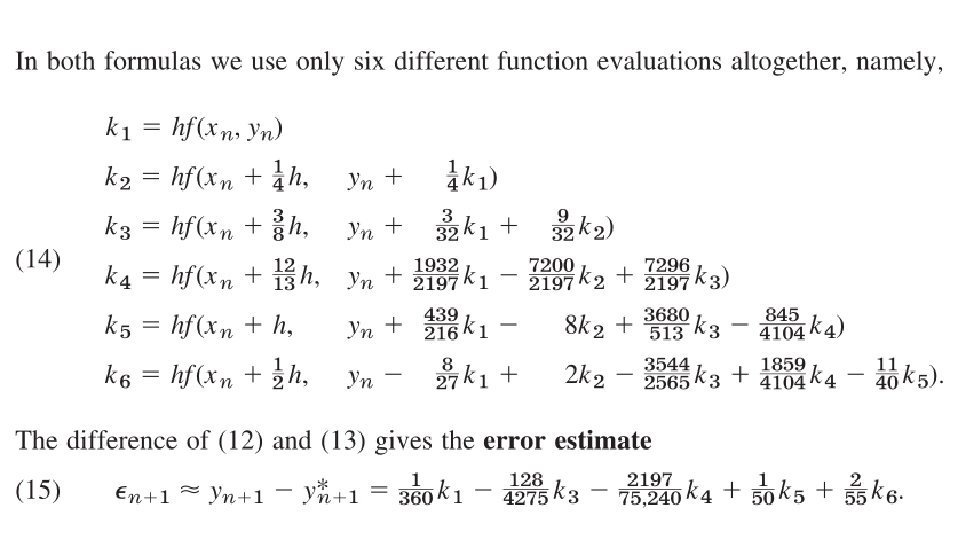
RKF 45 used by Maple E. Fehlberg [Computing 6 (1970), 61– 71] proposed and developed error control by using two RK methods of different orders. The difference of the computed y-values at gives an error estimate to be used for step size control. Fehlberg discovered two RK formulas that together need only six function evaluations per step. RKF has become quite popular. For instance, Maple uses it (also for systems of ODEs). Erwin Fehlberg (1969). Low-order classical Runge-Kutta formulas with step size control and their application to some heat transfer problems. NASA Technical Report 315.
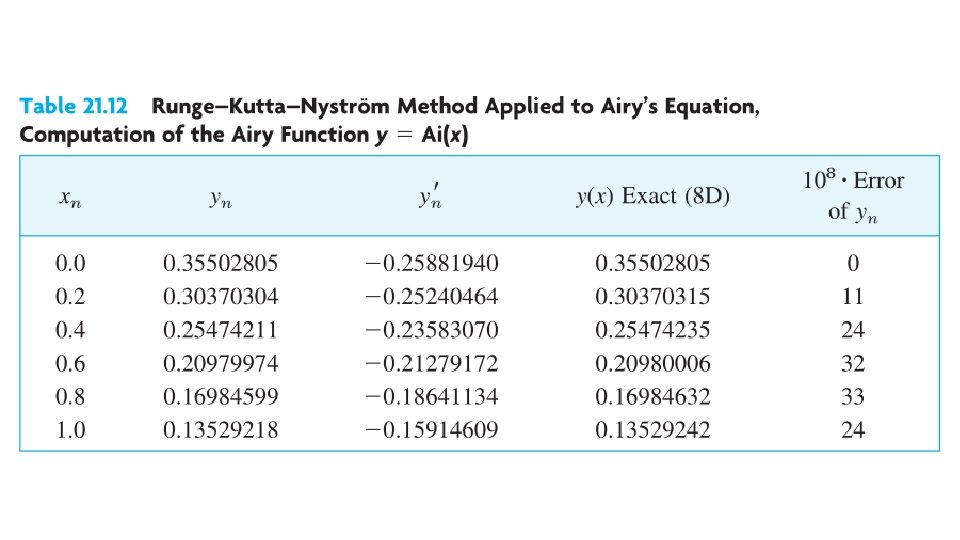
Runge–Kutta–Nyström Methods (RKN Methods)
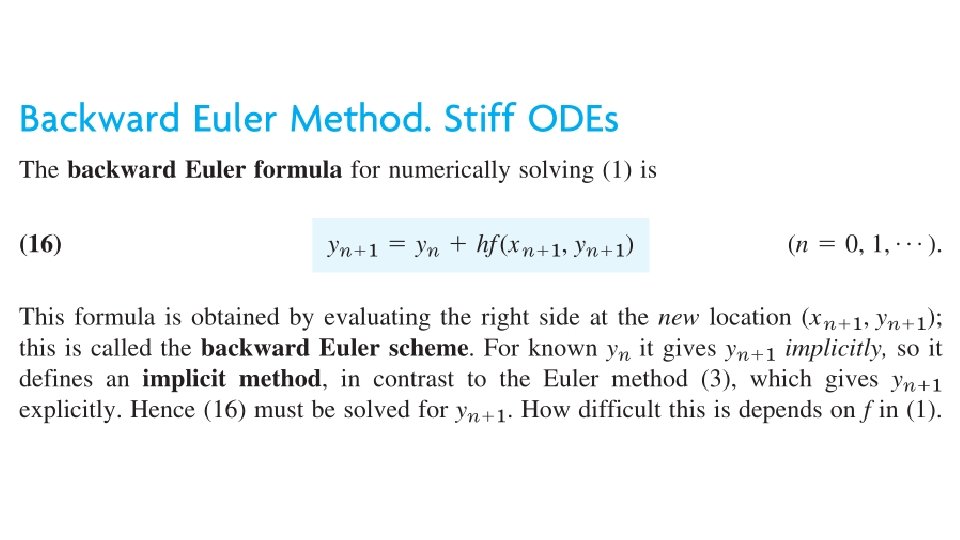
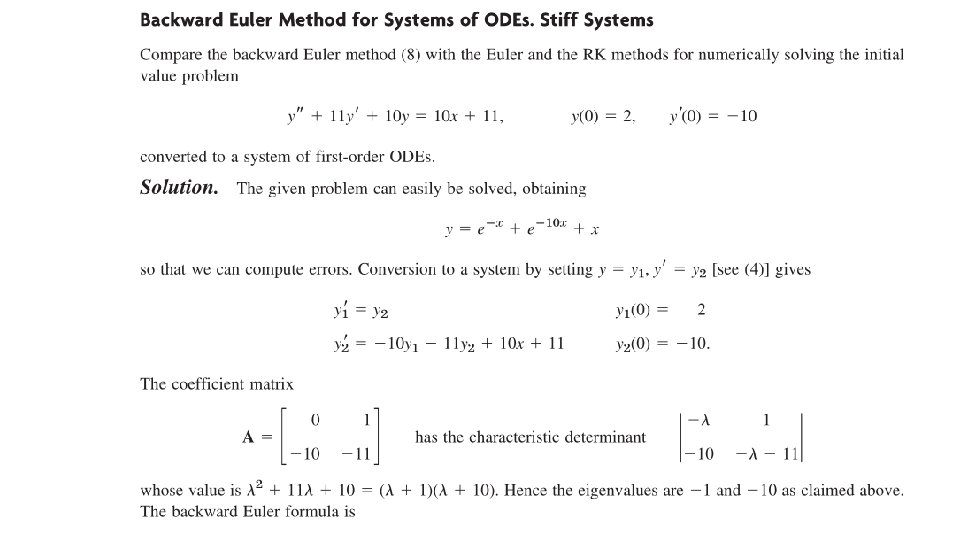
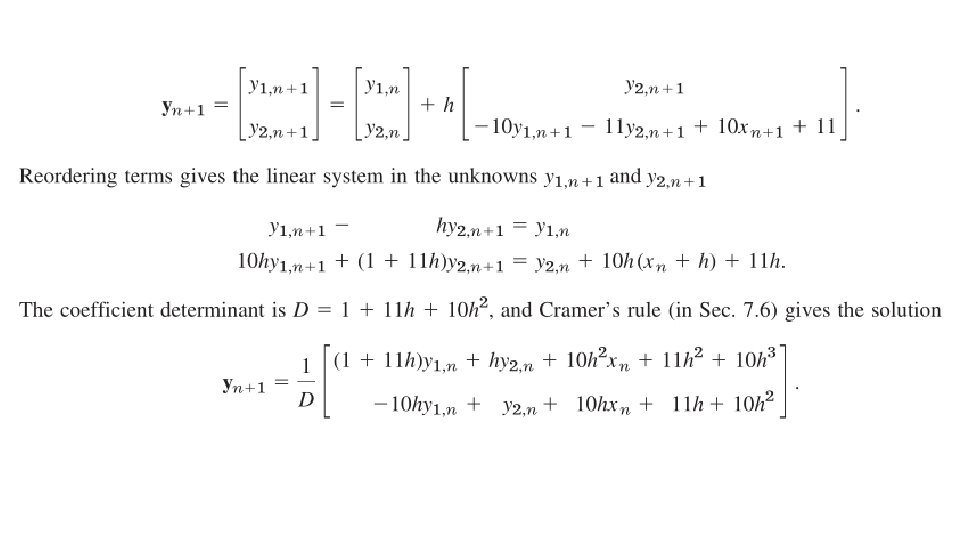
Stiff problems and implicit solutions
Euler method with h =0. 1 for a stiff ODE and exact solution
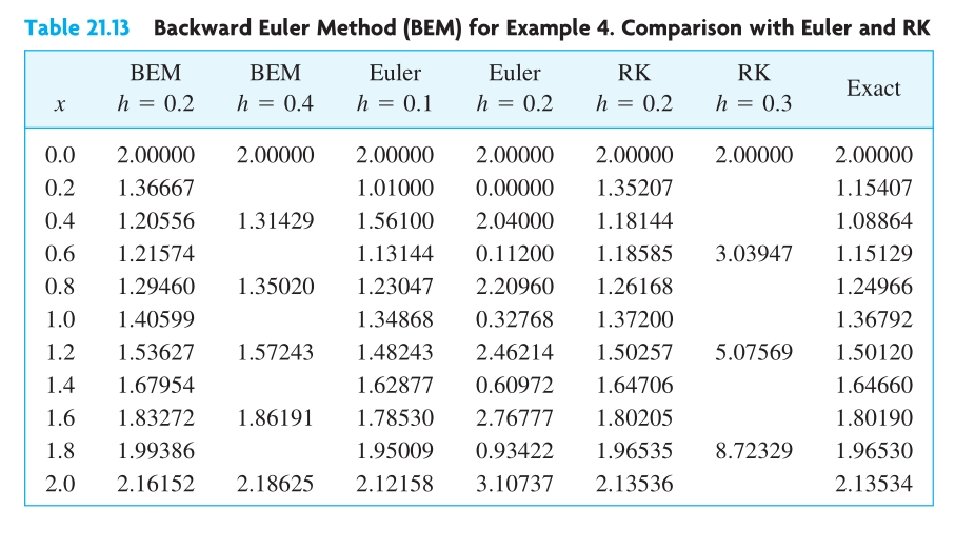
Stability of the backward Euler method for any h; Stability of the Euler method for h=0. 1, but instability for h=0. 2. Stability of RK for h=0. 2, but instability for h=0. 3. Euler method with h = 0. 18 is shown in the figure on the left. Stability for x>3 (approximately).