NSO 8055 Okeanograafiline prognoos Jri Elken elkenphys sea
 Atmosfääri")
 Þ analüüsida ja interpreteerida andmeid")








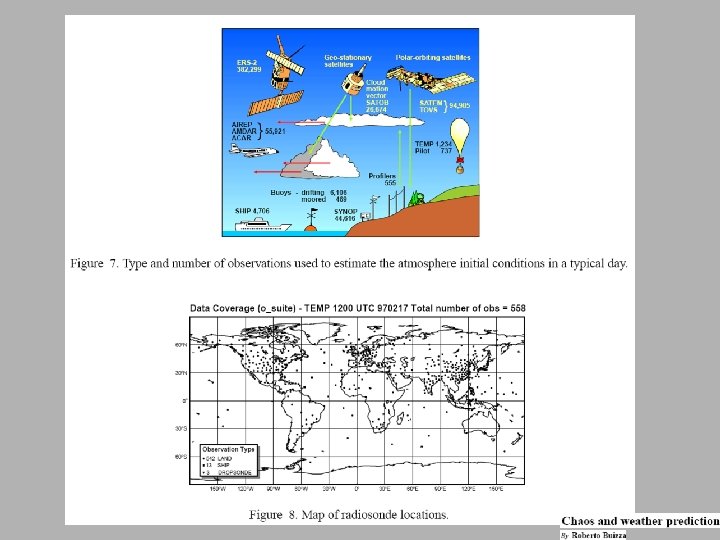





")


 / kiirülevaade Lihtne statistika prognoos-vaatlused nagu ruutkeskmine erinevus korrelatsioon standardhälvete")
 (1) / kiirülevaade Mõõdik, mis näitab tegeliku sündmuse prognoosimist või")
 (1 a) / kiirülevaade osavus koosneb: töökindlus sündmuse lahutusvõime (kui")
 (2) / kiirülevaade Kasutaja poolt etteantud lävendi ületamine õiged alarmid")
 (2 a) / kiirülevaade Õigete ja valede alarmide määramine ansambliprognoosist")
 (2 b) / kiirülevaade")




, Eesti Meteoroloogia ja Hüdroloogia")
- Slides: 30
NSO 8055 Okeanograafiline prognoos Jüri Elken elken@phys. sea. ee Operatiivne okeanograafia (Met. Ocean) Atmosfääri prognoositavus lineaarne ja mittelineaarne režiim algtingimuste vigade mõju ECMWF mudelist ansambli prognooside osavus HIRLAM
Operatiivne okeanograafia: Þ rutiinselt koguda informatsiooni (automaatjaamad, satelliidid jne) Þ analüüsida ja interpreteerida andmeid (mudelid, andmete assimileerimine jne) Þ koostada ja õigeaegselt edastada prognoose merede ja ookeanide ning nende kohal oleva atmosfääri kohta Þ ajalooliselt oli ilmateenistuste osa Þ 60 -80 ndatel kiire areng mereväe kõrgendatud nõudmiste tõttu Þ kaasajal iseseisev tsviiltegevuse valdkond, üldiselt jälgib operatiivse meteoroloogia arenguid GOOS (Global Ocean Observing System) 1991 (ÜRO: IOC, WMO, UNEP) Euro. GOOS (European Global Ocean Observing System) 1994 (konsortsium) BOOS (Baltic Operational Oceanographic System) 2001 (konsortsium) Praktilised ülesanded: Þ hoiatused (rannikumere üleujutused, jää- ja tormikahjud, kahjulike vetikate vohamine, saasteainete levik jne) Þ merenähtuste elektronkaardid Þ laevateekondade planeerimine Þ mereelustik, kliima
Atmosfääri mõjud merele tuul õhurõhu gradient õhutemperatuur õhuniiskus pilvisus sademed süvavesi x x lainetus X meretase X x pinnahoovused X x pinnatemperatuur X X x X jää X X x vetikad X X x X X X – määrava tähtsusega Valemid vt Füüsikaline okeanograafia ja limnoloogia 05 ja 06
The predictability of weather and climate forecasts is determined by the projection of uncertainties in both initial conditions and model formulation onto flow-dependent instabilities of the chaotic climate attractor. vead algtingimustes ja mudeli formuleeringus toovad kaasa voolamiste ebastabiilsuse Maa kliima on kaootilise süsteemi prototüüp. Lorenzi attraktori (1963) aluseks oli atmosfääri lihtsustatud konvektsioon. Sünoptilised tsüklonid tekivad suuremastaabilise tsirkulatsiooni ebastabiilsusest. Kliimat iseloomustavad erinevad “tasakaalulised olekud”, mille vahel on bifurkatsiooni tõttu kiired üleminekud, st toimub režiiminihe (regime shift).
Mittelineaarses režiimis võib väike algtingimuste muutus viia tulevikus suurtele muutustele Ansambli prognoosi korral arvutatakse süsteemi evolutsiooni erinevate lähedaste algtingimuste korral, võimalikke olekuid näitab ajas ja ruumis muutuv tõenäosustiheduste funktsioon /pdf/
Prognoosivigade tõenäosustiheduse evolutsioon: lihtne näide olekuvõrrand tõenäosusetiheduse evolutsioon algtingimuste vigade tõenäosustihedus mittelineaarne tõenäosus, et “õige” algolek on “ruumis” V prognoositavus kaob Sünoptilises mastaabis (1000 km) kestab lineaarne faas 1 -2 päeva
Prognoos 1 Prognoos 3 Prognoos 2 Tegelik Lähedased algolekud võivad prognoosimisel anda väga erineva tulemuse
Algselt lähestikku paiknevad punktid on ka hiljem lähestikku 3 -dimensionaalne Lorentzi attraktor simuleerib üldistatud koordinaatides atmosfääri konvektsiooni (vt ka Wikipedia) https: //en. wikipedia. org/wiki/Lorenz_system Algselt lähestikku paiknevate punktide kaugus kasvab Lorenz’i (1963) attraktori evolutsioon kolme erineva algtingimuste parve korral. Prognoositavus sõltub algtingimuste valikust.
Ansambli prognoos: varieeritakse pisut algtingimusi. Erinevates oludes võib ansambli prognooside kokkulangevus tugevalt varieeruda Prognoos kuni 2 päeva on suhteliselt hea, pikema perioodi prognoosi täpsus sõltub ilmasüsteemi olekust
Euroopa keskpika ilmaennustuse keskuse mudel ECMWF = European Centre for Medium-Range Weather Forecast
One source for errors: different parameterizations of horizontal diffusion, convection, radiation, gravity wave drag
Atmosfääri tsirkulatsiooni erinevus mudel-vaatlused Systematic Errors in the ECMWF Forecasting System
Sünoptilise aktiivsuse erinevus mudelvaatlused: süstemaatilised vead näha on peamiste tormide teekonnad sünoptiline aktiivsus = stdev päevast päeva muutustest Systematic Errors in the ECMWF Forecasting System
Sünoptilise aktiivsuse erinevus 5 ja 10 päevase prognoosi vahel vigade kasvukiirus erinevad kümnendid 1990 ndatest alates on vigade kasvukiirus kahanenud (vead kasvavad kuni maksimaalseni, ca 2 kuu jooksul) Systematic Errors in the ECMWF Forecasting System
ECMWF ansambli prognoosi süsteem EPS algtingimustele lisatakse häiritused, igale “ansambli” liikmele erinevad
Kõige ebastabiilsemad singulaarvektorid algtingimuste häiritused genereeritakse singulaarvektorite meetodil (detailsemalt vt algmaterjal)
Eady indeks: häirituste kasvukiirus häiritused kasvavad barokliinse ebastabiilsuse tõttu on seotud tsüklonite tekkega
Tundlikes piirkondades tehtavad mõõtmised vähendavad prognoosivigasid
Prognoosi osavus (forecast skill) / kiirülevaade Lihtne statistika prognoos-vaatlused nagu ruutkeskmine erinevus korrelatsioon standardhälvete suhe keskmiste erinevus (bias) ei tarvitse praktikas olla piisav Meteoroloogias kasutatakse sageli ansambli prognoosi osavuse mõõdikuid: Brier’i mõõdik ansambli prognoosi liikmetest, prognoositud sündmuse toimumine võrreldes tegelikult toimunud sündmusega ? ? Sündmuse defineerimine Suhteline operatsioonimõõdik (ROC) õigete ja valede alarmide osakaal
Prognoosi osavus (forecast skill) (1) / kiirülevaade Mõõdik, mis näitab tegeliku sündmuse prognoosimist või mitteprognoosimist sündmus, näiteks: 3 päeva jooksul on õhutemperatuur alla 0 o Perfektne = 0; absurdne = 1
Prognoosi osavus (forecast skill) (1 a) / kiirülevaade osavus koosneb: töökindlus sündmuse lahutusvõime (kui palju toimunud sündmused erinevad keskmisest sündmuste sagedusest o) sündmuse määramatus (arvestab sündmuse jälgitud varieeruvust) ρ(p) – sündmuse E prognoosimise sagedus tõenäosusega p o(p) – osakaal, kui E tõesti juhtus
Prognoosi osavus (forecast skill) (2) / kiirülevaade Kasutaja poolt etteantud lävendi ületamine õiged alarmid valed alarmid
Prognoosi osavus (forecast skill) (2 a) / kiirülevaade Õigete ja valede alarmide määramine ansambliprognoosist õiged alarmid valed alarmid Perfektne = 1; absurdne = 0. 5
Prognoosi osavus (forecast skill) (2 b) / kiirülevaade
Läänemere regiooni ilmaennustusmudelid Slide by Markku Kangas
www. fmi. fi
www. smhi. se
The DMI Weather forecasting system The operational system consists of 4 models that are identical except for horizontal resolution and integration domain. All versions have 40 layers in the vertical. T 15 Number of vertical levels K 05 S 03 40 40 Horizontal resolution 0, 15° (16 km) 0, 09° (10 km) 0, 05° (5 km) 0, 03° (3 km) Time step 450 s 400 s 150 s 90 s ECMWF M 09 60 hours 48 hours 54 hours Boundary values Forecast length The forecasting system is run on a Cray-XT 5 supercomputer (3200 processors) with connections to other DMI computers. www. dmi. dk M 09
Aastal 2003 käivitus Eestis Tartu Ülikooli Keskkonnafüüsika Instituudi (TÜ FKKF), Eesti Meteoroloogia ja Hüdroloogia Instituudi (EMHI) ja Soome Meteoroloogia Instituudi (FMI) vaheline koostööprojekt. Projekti eesmärgiks on kõrglahutusliku eksperimentaalse kvaasioperatsioonilise numbrilise ilmaennustuskeskkonna käivitamine Eestis. Projekti vundamendiks on piiratud ala numbriline ilmaennustusmudel HIRLAM ja selle TÜ FKKF juures arendatav mittehüdrostaatiline laiendus. Suur mudel (ETA) on hüdrostaatiline mudel, mille võrgusammu pikkus on 11 x 11 km. Väike mudel (ETB) on mittehüdrostaatiline mudel, mille võrgusammu pikkus on 3, 3 x 3, 3 km. www. emhi. ee