Introduccin Definicin La colocalizacin de 2 o ms





























: “En la correlación de")








=0 Σ n pixels (Bi-b)=0 Intensity Correlation quotient:")













- Slides: 60
Introducción • Definición: – La colocalización de 2 o más marcadores de estructuras celulares, es el sobrelapamiento total o parcial de la distribución física de poblaciones moleculares dentro de un volumen tridimensional. . .
Introducción El análisis de colocalización por microscopía óptica está aquejado de ambigüedad e inconsistencia. Evaluación cualitativa simplista de pixeles sobrelapados Elección entre varias soluciones complejas basadas en análisis estadístico de distribuciones de intensidades de pixeles
Introducción • ¿Están 2 fluorocromos localizados en la misma estructura en un volumen 3 D? – Considerando: • Distribución de fluorocromos en rango de nm. • Resolución del microscopio óptico cercano al μm.
Introducción • Por lo tanto la veracidad de pende de: – Comprensión de la organización 3 D de la célula. – Calidad y confiabilidad de las técnicas de marcación. – Dimensiones definidas por el sistema óptico. – Procedimiento de adquisición de imágenes. – Procesamiento y Análisis.
Principios básicos de óptica • Limitaciones de la microscopía: – Naturaleza dual de la luz: • Onda • Partícula – Recolección parcial de la luz por el lente objetivo: • Cuantificada por la Apertura Numérica (NA): – Relacionada con el ángulo de recolección de la luz emitida por el objeto. – Determina la capacidad de distinguir dos fuentes de luz puntual adyacentes.
Principios básicos de óptica • Idealmente: NA condensador = NA objetivo • En esas condiciones… – Cada punto de luz saliendo del lente puede ser considerada como una puede ser considerada una fuente de luz individual emitiendo un frente de onda circular (Principio de Huygens).
Dos o más ondas pueden producir interferencia…
Patrón de difracción en una pantalla de la luz emitida por uno o dos objetos fluorescentes.
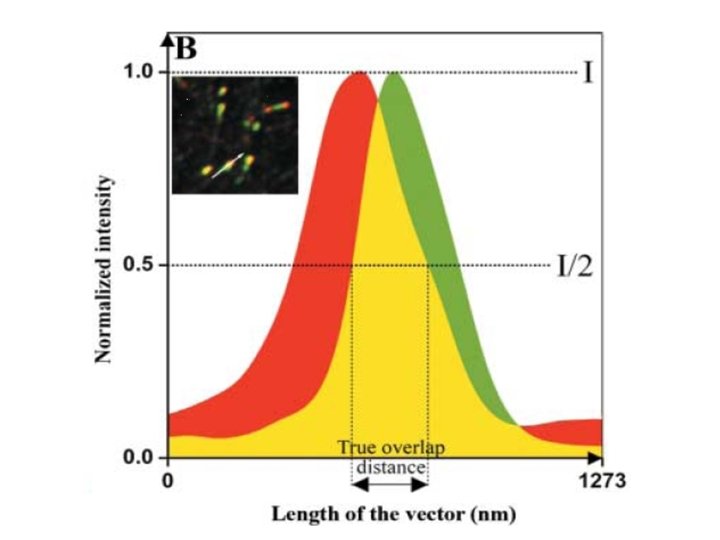
Resolución óptica: Distancia mínima entre los centros de los Airy discs, dando una distribución de energía cuyo mínimo es I/2. La NA depende del índice de refracción del medio. El microscopio confocal mejora la resolución en un 30% sólo por la introducción del pinhole del diámetro de Airy disc, que elimina la luz fuera de foco.
El Airy disc en el eje z visto de lado se elonga, como una pelota de rugby, y el patrón de difracción total tiene forma de reloj de arena. Este patrón de difracción define la Point Spread Function (PSF). Por lo tanto, el desbalance entre resolución lateral y axial distorsiona la forma circular de un objeto en el eje z. Entonces un objeto puntual naométrico “brillante” va a dar una imagen de al menos 200 nm de ancho y 500 nm de profundidad. Cualquier análisis de colocalización debe ser hecho en estas 3 dimensiones considerando este componente de profundidad.
Imagen digital • Transformación de la señal de luz en señal electrónica para procesamiento computacional. • Teorema de muestre de Nyquist: – Tamaño del área sensible (pixel) al menos FWHM/2 – La imagen proyectada de un punto individual debe aparecer en al menos 2 pixeles adyacentes. (x, y: 2 x 2=4 pixeles) • Lo mismo es aplicable al tamaño de los “pasos” en z.
Imagen digital • Oversampling: una fuente de luz de tamaño subresolutivo es captada por más de 2 pixeles: – la imagen se agranda, pero se pierde intensidad de luz, sin ganar en resolución. • Evitar saturación: – Impide la adecuada cuantificación de la intensidad de cada pixel. – Útil la mesa de color.
Elección de la técnica de adquisición Confocal (Airy disc=10% de la energía total de una fuente de luz) Wide-field deconvolucionado
Fluorocromos: cross-talk y bleed-through Stokes shift Cross-talk Bleed-through Spectral unmixing
– FRET: define cercanía a 10 -100Å. – Fuente de luz de excitación: moncromática. – Objetvos: • Plan-apocromático: evita llevar luz de distintas λ a distintos planos focales. • De inmersión: – Aceite: muestras fijadas. – Agua: muestras vivas.
Otras consideraciones • Chequeo del sistema optico: cálculo de la PSF con beads fluorescentes. • Distribución de intensidades de excitación disparejas. • Ruido: – Fuentes “pestañeantes” (lámparas de mercurio, xenón) – Emisión (sal y pimienta) – Detector – Intrínseco estadístico
“As perfect as an optical system can be, we have already seen that an image is an imperfect representation of the biological system. ”
Medición de colocalización • Dos formas básicas de evaluación de eventos de colocalización: – Aproximación estadística basada en coeficientes de correlación de intensidades (ICCB). – Aproximación basada en el objeto.
La misma tinción del Golgi en célula vegetal visualizada con 2 canales. Tinción del RE con 2 anticuerpos específicos. Tinción proteínas EB 1 y CLIP-170 asociadas al extremo + de microtúbulos en células He. La. Tinción de mitocondria y núcleo en células de mamífero.
ICCB • Medición mediante coeficientes de correlación de la fuerza de relación lineal entre los valores de intensidades de fluorescencia de pixeles en gris entre los canales verde y rojo.
ICCB • Coeficiente de Pearson • Coeficientes de Manders: • Coeficiente de sobreposición • Coeficientes de Manders • Aproximación de Costes • Aproximación de Van Steensel • Aproximación de Li
Coeficiente de Pearson ≈ 1
Coeficiente de Pearson < 0
Coeficiente de Pearson < 1
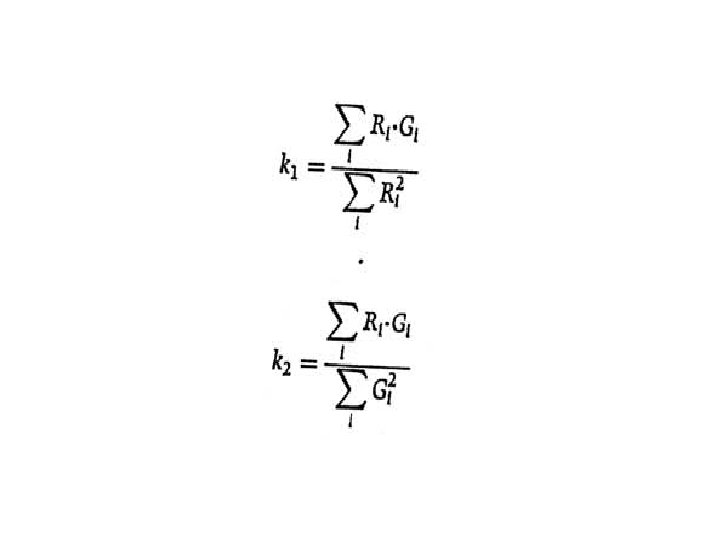
Coeficiente de Pearson = 0, 69
Problemas del coeficiente de Pearson • 1 Pobre discriminación entre colocalización parcial y exclusión, sobretodo en presencia de ruido (ie. sensible al umbral). 2 3 Colocalización total con ruido aleatorio progresivo.
Problemas del coeficiente de Pearson 4 Coeficiente de Pearson < 1 El coeficiente de Pearson es sensible a diferencias de intensidad.
Problemas del coeficiente de Pearson • También es sensible a la distribución heterogénea de la colocalización en distintas zonas de la muestra. • También es corrompido por pequeños bleed-through.
Coeficiente de Pearson
Coeficiente de Manders • Overlap coefficient (de 0 a 1): “En la correlación de Pearson, los valores promedios de gris, son restados a los valores originales. Así, los valores de este coeficiente tienen un rango entre -1 y 1. Los valores negativos son difíciles de interpretar cuando el grado de sobrelapamiento es una cantidad a medir. ” (Manders 1993)
Coeficiente de Manders Razón de las intensidades sumadas de los pixeles de la imagen roja, para las cuales la intensidad en el canal del verde es mayor a 0 y la intensidad total en el canal del rojo. Viceversa
Coeficiente de Manders • Ventaja: – Es un buen indicador de la proporción de la señal verde coincidente con la señal roja, en relación a su inetnsidad total, independiente que las intensidades de las dos señales sean distintas entre sí.
Coeficiente de Manders • Desventajas: – Sólo se cumple si el fondo se lleva a 0 (umbral dependiente). – No distingue entre colocalización parcial o completa. – Es sensible al ruido y al cross-talk.
Aproximación de Costes • 2 pasos: 1. Coeficiente de Pearson diferencial en distintas regiones del histograma bidimensional→ umbral definido automáticamente.
Aproximación de Costes 2. Análisis estadístico basado en aleatorización de la imagen y cálculo del nuevo coeficiente de correlación de Pearson. • Desordenan la imagen tomando como unidad partículas definidas como bloques de pixeles de dimensiones dadas por la FWHM de la PSF del canal verde. • Este proceso se repite 200 veces para cada imagen, calculan el PC cada vez. • La PC de la imagen original se compara con la distribución de las PC generadas aleatóreamente.
Aproximación de Costes • Limitaciones: – Incremento de los parámetros estadísticos de ruido, especialmente la desviación estándar del ruido. – Método muy dependiente de la forma en que se prepara el test.
Aproximación de Van Steensel • Cross-correlation analysis: – Desplazamiento de la imagen verde, en el eje x, pixel a pixel respecto a la imagen roja, calculando los respectivos PC. – Se grafican los PC en función del δx: Cross-correlation function.
Aproximación de Van Steensel • La cross-correlation function: – Ventajas: • Permite discriminar entre distintos eventos de correlación. • Permite estimar las dimensiones de las partículas con el ancho de la campana. – Desventaja: • Valido sólo para partículas pequeñas isotrópicas, ya podría variar de acuerdo a la orientación en relación al eje de desplazamiento elegido.
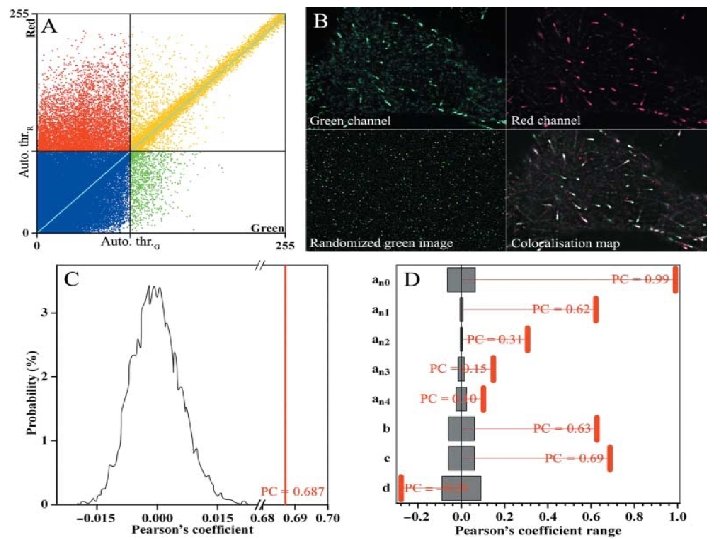
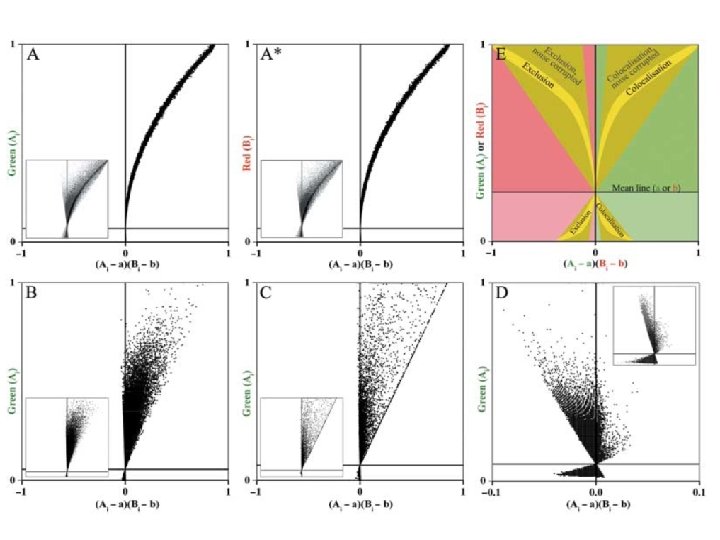
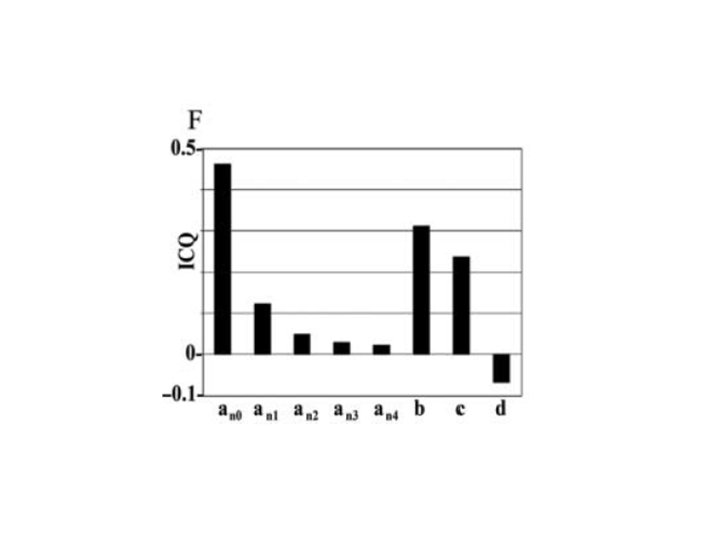
Aproximación de Li Σ n pixels (Ai-a)=0 Σ n pixels (Bi-b)=0 Intensity Correlation quotient: (Σ(Ai-a)(Bi-b))-0, 5= ICQ
Aproximación basada en el objeto • Los indicadores numéricos de los ICCB adolecen de estar basadas en la naturaleza compuesta de las imágenes, que en realidad es un mosaico de estructuras (las verdaderas regiones de interés) y, aunque minimizado, algo de fondo.
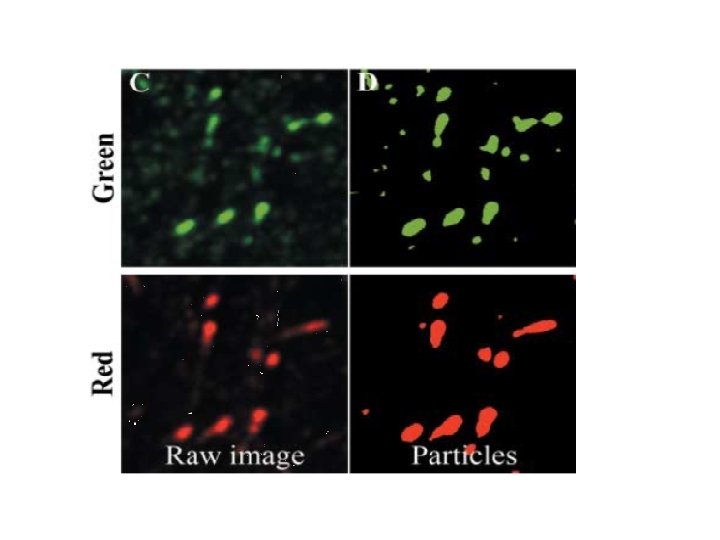
Buscando objetos: segmentación básica de la imagen • Los pixeles derivados del ruido deberían tener una intensidad inferior a los generados por estructuras: – Primer paso: • Fijar el umbral (manual o automático): Esto no elimina todo el ruido pero define dos áreas: 1. Regiones de estructura y ruido 2. Regiones sólo de ruido.
Buscando objetos: segmentación básica de la imagen • Segundo paso: Sobel filtering: – Cambio súbito de la intensidad de los pixeles al hacer un escaneo lineal. – La primera derivada de este cambio será el punto 0, obteniendose una nueva imagen de bordes más nítidos al utilizar estos valores. Detección de bordes (filtros).
Buscando objetos: segmentación básica de la imagen • Otro método: – Connexity analysis: • Inspección sistemática del vecindario (8 pixeles en 2 D, 26 en 3 D) de un pixel de referencia, seleccionando los de intensidad sobre el umbral como parte de la misma estructura del pixel de referencia. • Todos los pixeles seleccionados reciben un número. • Los pixeles con al menos 1 pixel vecino vacío se consideran como parte del borde.
Buscando objetos: segmentación básica de la imagen • Otro método: – Top-hat filter: • Estructuras del mismo tamaño y forma. • Ventaja de corregir iluminación desigual, disminuyendo la intensidad de la estructura al mínimo. • Pierde información.
Buscando objetos: segmentación básica de la imagen • Con todo, los dos métodos anteriores pueden no lograr individualizar todas las estructuras. • En ese momento se puede aplicar el filtro de watershed.
• Después de la segmentación, se pueden encontrar los centroides y las intensidades centrales de las estructuras. • Centroides: basado en la geométría de la estructura. • Intensidad central: basado en la distribución de la intensidad de fluorescencia.
Buscando coincidencias de estructuras discretas Colocalización: Si las estructuras se encuentran a una distancia igual o menor a la resolución en los ejes x, y o z.
Aproximación de Lachmanovich • Top-hat filtering y watershed processing para segmentación. • Estrategia del vecino más cercano: – Se seleccionan las estructuras del canal con menos objetos y se buscan la cercanía del vecino más cercano del canal con más objetos, usando los centroides. – Grado de colocalización= % de objetos del 1° canal colocalizando con objetos del 2° canal/N° total de objetos del 1° canal. – Se prueba significancia con comparaciones de imágenes desordenadas al azar (tipo Costes).
Aproximación de Lachmanovich • Límites: – Los procedimientos de segmentación seleccionan elementos mediante criterios predefinidos: isotropismo vs subestimación. Superable trabajando con centros de intensidad en vez de centroides. – Descarte de estructuras pequeñas colocalizadas con estructuras más grandes que la resolución. Para esto sirve la estrategia de overlap.
Aproximación de Lachmanovich • Estrategia de overlap: – Los objetos colocalizan si los centriodes de un canal cae dentro de la estructura segmentada del otro canal. – % de overlap. – Comparación con distribuciones al azar. – Da información de un tipo de estructuras y no de estima la colocalización global. – Cambiando los settings de los filtros de segmentación, se puede obtener información de distintas estructuras de la misma imagen.
Aproximación de Jaskolski • Sobel filtering traducido a imagen binaria: – Intensidad= 0 (fuera del borde): Pixel negro. – Intensidad= 1 (dentro del borde): Pixel blanco. • Superposición de ambos canales con esta segmentación con la Boolean Operation. • Resultado: Visión de la imagen a través del filled edge map. • Cálculo de correlación con el Mean Deviation Product: – (Ai-a)(Bi-b)/[(Amax-a)(Bmax-b)]= -1; 1 – Icorr= Valores(+)/valores(-)
Aproximación de Jaskolski • Ventaja: – Combina visualización directa con datos de correlación. • Desventajas: – Altamente dependiente de aplicabilidaddel algoritmo y del Sobel filtering. – No ofrece validación estadística directa, pero propone un dignóstico diferencial gracias al parametro de normalización (n. MDP).