Humanhuman interaction Humanobject interaction Humancomputer interaction Also known


Human-human interaction Human-object interaction Human-computer interaction

• Also known as HCI • User interface – A place where interaction between humans & machines occurs • Types – Command-line interface – Graphical user interface – Natural user interface

Dos Unix

GUI

NUI No No.

8


wiki Controller-free Microsoft Spring 2012 Xbox 360 by SCM-City. U 10

wiki

wiki

 –")
§ Four microphone array with hardware-based audio processing – Multichannel echo cancellation (MEC) – Sound position tracking – Other digital signal processing (noise suppression and reduction)

http: //kinectforwindows. org Direct. X® SDK - June 2010 Current runtime for Microsoft Direct. X® 9 Microsoft Speech Platform Runtime, version 10. 2 Microsoft Speech Platform - Software Development Kit, version 10. 2 Kinect for Windows Runtime Language Pack, version 0. 9

Start New Windows Presentation Foundation Project Add a reference to: using Microsoft. Kinect;
;")
Kinect. Sensor. Chooser sensor. Chooser = new Kinect. Sensor. Chooser();
 { if (sensor != null) { sensor. Stop(); sensor.")
void Stop. Kinect(Kinect. Sensor sensor) { if (sensor != null) { sensor. Stop(); sensor. Audio. Source. Stop(); } }

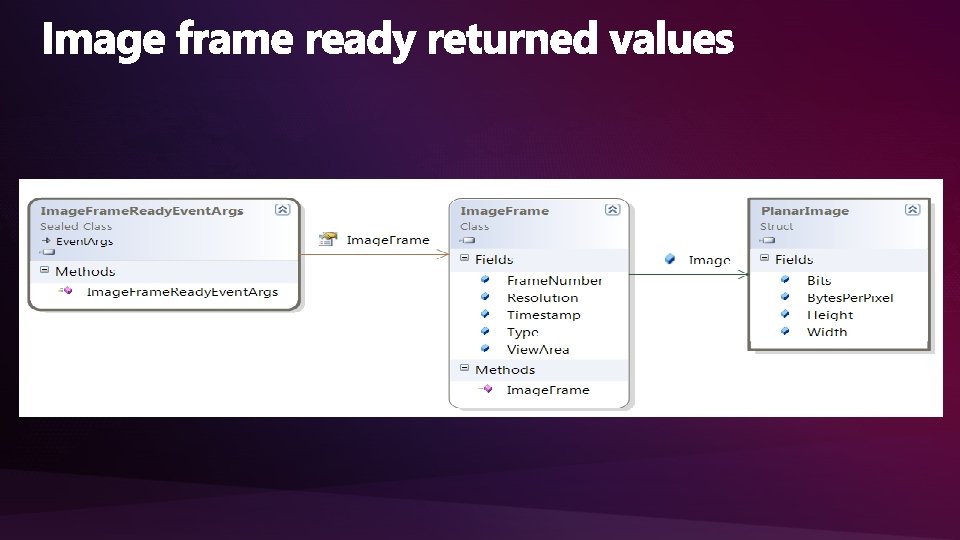
new. Sensor. Color. Stream. Enable(Color. Image. Format. Rgb. Resolu tion 640 x 480 Fps 30); new. Sensor. Color. Frame. Ready += new. Sensor_Color. Frame. Ready;
) { if")
using (Color. Image. Frame color. Frame = e. Open. Color. Image. Frame()) { if (color. Frame != null) { // Copy the pixel data from the image to a temporary array color. Frame. Copy. Pixel. Data. To(this. color. Pixels); } // Write the pixel data into our bitmap this. color. Bitmap. Write. Pixels( new Int 32 Rect(0, 0, this. color. Bitmap. Pixel. Width, this. color. Bitmap. Pixel. Height), this. color. Pixels, this. color. Bitmap. Pixel. Width * sizeof(int), 0); } img. Kinect. Source = color. Bitmap;

new. Sensor. Color. Frame. Ready += new. Sensor_Color. Frame. Ready; new. Sensor. Depth. Frame. Ready += new. Sensor_Depth. Frame. Ready;
 { //offset")
private int Get. Distance. With. Player. Index(byte first. Frame, byte second. Frame) { //offset by 3 in first byte to get value after player index int distance = (int)(first. Frame >> 3 | second. Frame << 5); return distance; }
; new. Sensor. Skeleton. Frame. Ready += new. Sensor_Skeleton. Frame.")
new. Sensor. Skeleton. Stream. Enable(parameters); new. Sensor. Skeleton. Frame. Ready += new. Sensor_Skeleton. Frame. Ready;
 { using")
void new. Sensor_Skeleton. Frame. Ready(object sender, Skeleton. Frame. Ready. Event Args e) { using (Skeleton. Frame skeleton. Frame. Data = e. Open. Skeleton. Frame()) { if (skeleton. Frame. Data != null) { skeleton. Frame. Data. Copy. Skeleton. Data. To(all. Skeletons); Skeleton first = (from s in all. Skeletons where s. Tracking. State == Skeleton. Tracking. State. Tracked select s). First. Or. Default(); //if(first!=null) //this. Title=(first. Joints[Joint. Type. Head]. Position. X. To. String()); } } }
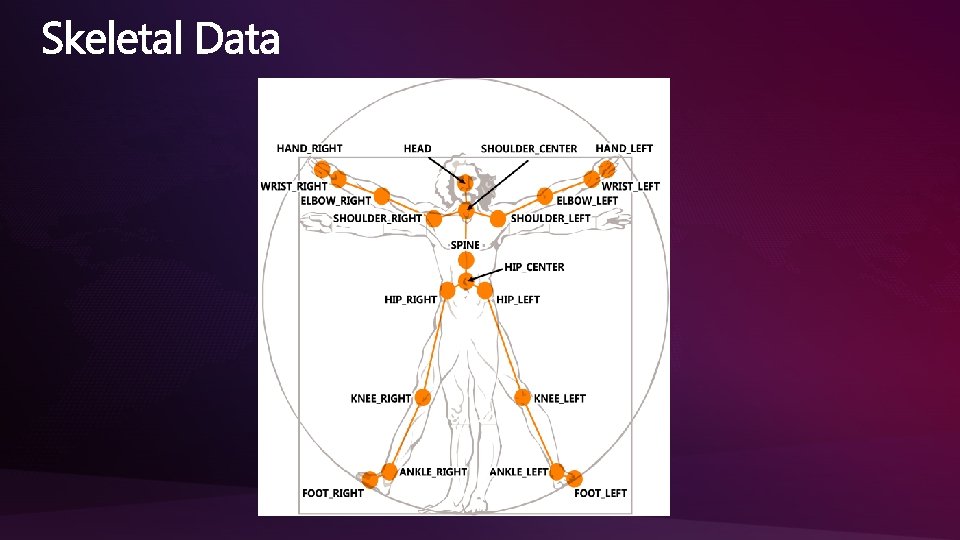
![– – skeleton. Joints[Joint. ID. Head]. Position. X skeleton. Joints[Joint. ID. Head]. Position. Y](http://slidetodoc.com/presentation_image_h2/b9e3d4308f09093a39713207a1e549f3/image-34.jpg "– – skeleton. Joints[Joint. ID. Head]. Position. X skeleton. Joints[Joint. ID. Head]. Position. Y")
– – skeleton. Joints[Joint. ID. Head]. Position. X skeleton. Joints[Joint. ID. Head]. Position. Y skeleton. Joints[Joint. ID. Hand. Left]. Position. X skeleton. Joints[Joint. ID. Hand. Left]. Position. Y
; parameters. Smoothing = 0. 7")
Transform. Smooth. Parameters parameters = new Transform. Smooth. Parameters(); parameters. Smoothing = 0. 7 f; parameters. Correction = 0. 3 f; parameters. Prediction = 0. 4 f; parameters. Jitter. Radius = 1. 0 f; parameters. Max. Deviation. Radius = 0. 5 f;

http: //www. microsoft. com/en-us/kinectforwindows/ http: //www. i-programmer. info/programming/hardware/2623 getting-started-with-microsoft-kinect-sdk. html http: //channel 9. msdn. com/Series/Kinect. SDKQuickstarts
- Slides: 38