SYSTEMY CZASU RZECZYWISTEGO PROF DOMINIK SANKOWSKI Wykady 20092010



 będzie okresowym sygnałem testowym MBS mającym w swoim widmie NF harmonicznych o")
 (4, 2 b) Ponieważ czas obserwacji")
, y(t) spełniają warunki Drichleta, więc mogą one być przedstawione w postaci szeregów")

, (4. 3). (4. 4) można napisać (4. 7) Wykorzystując ortogonalne")
 są zakłócone przez losowy szum")
 można zastąpić sumami, a wartości sygnału")
 (4. 13) k=1, 2, . . . NF")
 można punkt po punkcie obliczyć numerycznie bieżące sumy dla NF")
 można natychmiast otrzymać (ściślej prawie natychmiast) po")
")
 przyjmuje postać (7,")
 jest addytywnym losowym (białym) o wartości średniej równej zeru, więc")
 Można więc stwierdzić, że wariancje estymatorów proporcjonalnie do")

- Slides: 20
SYSTEMY CZASU RZECZYWISTEGO PROF. DOMINIK SANKOWSKI Wykłady 2009/2010
4. Identyfikacja charakterystyk częstotliwościowych metodą MBS 4. 1. Wyznaczanie estymat częstotliwościowych i 4. 2. Wariancja i zgodność estymat 4. 3. Identyfikacja w układzie zamkniętym. charakterystyk
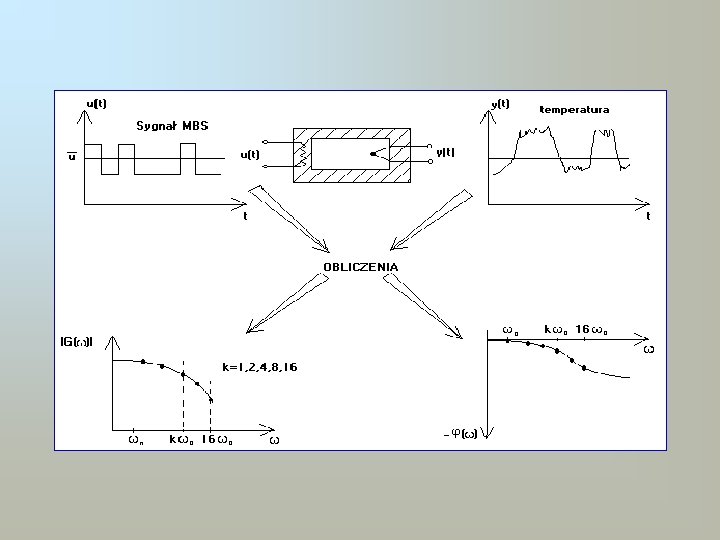
Wyznaczanie estymat i charakterystyk częstotliwościowych pieca metodą identyfikacji MBS Na rysunku 4. 1 przedstawiono w postaci schematu blokowego piec oporowy komorowy reprezentowany przez liniowy, stacjonarny obiekt o jednym sygnale wejściowym i jednym sygnale wyjściowym. n(t) Generator MBS u(t) Układ liniowy stacjonarny y(t) Cykliczne obliczenia G( ) Rys. 4. 1 Schemat blokowy układu do identyfikacji własności dynamicznych obiektu.
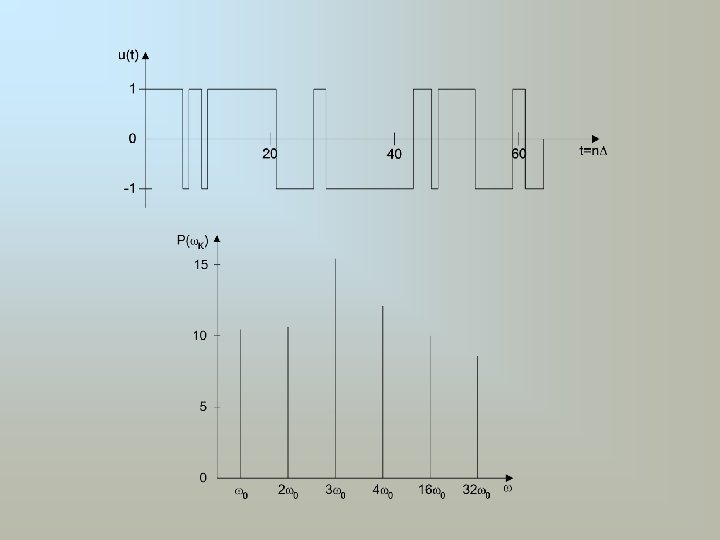
Niech u(t) będzie okresowym sygnałem testowym MBS mającym w swoim widmie NF harmonicznych o pulsacjach k 0 , w których jest skupiona przeważająca część mocy. Do grupy tej zaliczyć można sygnały MBS będące funkcją parzystą, lub nieparzystą, a także omówione w rozdziale 2. 4 przesunięte w czasie sygnały z optymalnym punktem startowym. Ponieważ obiekt identyfikacji jest liniowy i stacjonarny, to na wyjściu sygnał mierzony y(t) będzie okresowy, mający widmo zawierające wszystkie harmoniczne sygnału wejściowego, zakłócone przez addytywny szum n(t). Własności dynamiczne liniowego stacjonarnego obiektu mogą być opisane transmitancją widmową G( j ) wyrażoną wzorem (4. 1) gdzie: Y(j ), U(j ) - transformaty Fouriera sygnału wyjściowego i wejściowego, P( ), Q( ) - część rzeczywista i urojona transmitancji widmowej G(j ).
Transformaty te wyrażają się wzorami (4, 2 a) (4, 2 b) Ponieważ czas obserwacji (pomiarów) sygnałów wyjściowego y(t) jest skończony, równy całkowitej liczbie M okresów sygnału testowego MBS, to transformaty (4. 2) po zaniku składowej przejściowej wyrażają się wzorami: (4. 3 a) (4. 3 b) gdzie Tobs=MN całkowity czas obserwacji (pomiarów) sygnału wyjściowego.
Sygnały u(t), y(t) spełniają warunki Drichleta, więc mogą one być przedstawione w postaci szeregów Fouriera. (4. 4 a) (4. 4 b) gdzie: V - amplituda sygnału MBS, k - pulsacja k-tej harmonicznej ( k= k 0 =2 k/N ), 0 - pulsacja podstawowa aku, bku - wspólczynniki Fouriera k-tej harmonicznej sygnału testowego MBS aky, bky - wspólczynniki Fouriera k-tej harmonicznej sygnału wyjściowego
Wspólczynniki aku, bku sygnału dyskretnego MBS mogą być obliczone wcześniej przed rozpoczęciem eksperymentu zgodnie z wzorami (Van den Bos, 1967): (4. 5 a) (4. 5 b) Współczynniki aky, bky wyrażają się dobrze znanymi zależnościami: (4. 6 a) (4. 6 b)
Uwzględniając zależności (4. 1), (4. 3). (4. 4) można napisać (4. 7) Wykorzystując ortogonalne własności funkcji sinusa i cosinusa [93] przy uwzględnieniu założenia, że wszystkie pulsacje k= k 0 są całkowitą wielokrotnością pulsacji podstawowej 0, można po przekształceniach napisać: (4. 8) gdzie NF liczba pulsacji
Ze względu na to, że pomiary sygnału wyjściowego y(t) są zakłócone przez losowy szum n(t) mający rozkład normalny, współczynniki aky, bky są zastąpione ich estymatami i wyrażonymi wzorami (4. 9 a) (4. 9 b) Można wykazać (rozdz. 4. 2), że przy powyższych założeniach estymaty są zgodne, a względna wariancja tych estymat jest odwrotnie proporcjonalna do iloczynu czasu obserwacji i mocy zawartej w k-tej pulsacji sygnału wejściowego.
Dla potrzeb komputerowego przetwarzania danych całki (4. 9) można zastąpić sumami, a wartości sygnału wyjściowego y(t) próbkami z okresem próbkowania w chwilach t=n . Estymaty (4. 9) przybierają postać: (4. 10 a) (4. 10 b) Uwzględniając zależności (4. 8 -4. 10) łatwo wykazać że estymaty części rzeczywistej i urojonej charakterystyki częstotliwościowej pulsacji wyrażają się wzorami: , dla k-tej (4. 11 a) (4. 11 b)
Korzystając ze znanych zależności (4. 12) (4. 13) k=1, 2, . . . NF można otrzymać NF punktów charakterystyki częstotliwościowej w interesującym zakresie pulsacji. Rozpatrując wzory (4. 10) można zauważyć filtracyjny charakter procedury: mnożenie sygnału y(t) odpowiednio przez i i uśrednienie w przedziale czasu równym całkowitej wielokrotności (M) okresu sygnału MBS. Można więc zauważyć bliski związek tej metody z metodą korelacyjną.
Stosując wzory (4. 10) można punkt po punkcie obliczyć numerycznie bieżące sumy dla NF wartości pulsacji k jednocześnie w okresach jałowych komputera (pomiędzy operacjami kolejnego próbkowania sygnału wyjściowego). Należy zaznaczyć, że użycie tego algorytmu, który wykorzystuje jałowe okresy komputera, bardziej w rzeczywistości oszczędza czas obliczeń, niż - na przykład - użycie algorytmu Szybkiej Transformaty Fouriera (STF). Ponadto liczba danych koniecznych do zapamiętania ulega znacznej regulacji. Na przykład w metodzie PRBS identyfikacji - stosując nawet algorytm STF - w celu otrzymania charakterystyki częstotliwościowych jest wymagane zapamiętanie wszystkich danych (np. 64 punkty charakterystyki impulsowej) i wykonanie obliczeń w trybie “off-line” po przeprowadzonym eksperymencie. W przedstawionym powyżej algorytmie identyfikacji MBS jedynie wartość ostatniej próbki (wartość temperatury w chwili czasowej jest zapamiętywana przez komputer a ponadto zarezerwowanych jest 2 NF) rejestrów (akumulatorów) na obliczenia bieżących sum liczonych według zależności (4. 10) dla poszczególnych wartości k.
Korzystając z wzorów (4. 10 4. 13) można natychmiast otrzymać (ściślej prawie natychmiast) po ostatnim pomiarze wyniki identyfikacji postaci NF punktów charakterystyki częstotliwościowej obiektu. Wyniki te mogą posłużyć bezpośrednio jako dane do syntezy regulatora (Sankowski i inni, 1997) lub tez jako dane wyjściowe do poszukiwania modelu parametrycznego obiektu regulacji (Sankowski, 1989) Powyższe zalety i właściwości metody MBS umożliwiają stosowanie jej w systemie “on-line” przy użyciu automatycznego systemu gromadzenia i przetwarzania danych o niewielkiej nawet mocy obliczeniowej zarówno w układzie otwartym jak i zamkniętym. Stosując metodę MBS w układzie otwartym, w celu wyznaczania własności dynamicznych pieca jako obiektu identyfikacji można korzystać bezpośrednio z wzorów (4. 10 4. 13). Wykorzystanie metody MBS identyfikacji w układzie zamkniętym będzie omówione w następnym rozdziale.
4. 2. Wariancja i zgodność estymatorów Z definicji wariancji estymatora można napisać (7, 14) gdzie - estymator wyznaczony po czasie (po M sekwencjach sygnału MBS) Uwzględniając założenia o zakłóceniach na wyjściu (szum biały) przedstawione w rozdz. 4 niniejszej pracy można napisać (7, 15) gdzie - zmienne pomocnicze
Wprowadzając pojęcie funkcji korelacji własnej szumu z definicji wyrażenie (7, 15) przyjmuje postać (7, 16) Można wykazać przyjmuje postać , że po przekształceniach całka (7, 16) (7, 17)
Z założenia szum n(t) jest addytywnym losowym (białym) o wartości średniej równej zeru, więc (7, 18) gdzie: - impuls Diracka, c - stała zależna od poziomu szumów. Uwzględniając zależność (7, 19) wyrażenie (7, 16) przyjmie postać (7, 20)
Podobnie można wykazać, że (7, 21) Można więc stwierdzić, że wariancje estymatorów proporcjonalnie do iloczynu czasu trwania eksperymentu zawartej w t-tej harmonicznej sygnału wejściowego są odwrotnie i mocy Z wyrażenia (7, 21) wynika , że: (7, 22) Oznacza to, że estymatory są zbieżne do odpowiednio, według średniej drugiego rzędu [14]. Jak wykazano w pracy [8] ze zbieżności średniokwartalnej (drugiego rzędu) wynika zbieżność stochastyczna stanowiąca warunek wystarczający zgodności tych estymatorów. Z definicji [8, 14, 20, 50, 931] “Estymator nazywamy zgodnym, jeżeli ciąg jest stochastycznie zbieżny do wartości P, Q “
Podsumowując można stwierdzić: Estymatory części rzeczywistej i urojonej charakterystyki częstotliwościowej obiektu wyznaczonej w procesie identyfikacji metodą MBS są estymatorami nieobciążonymi, zgodnymi o wariancji odwrotnie proporcjonalnej do iloczynu mocy sygnału zawartej w k-tej harmonicznej i czasu eksperymentu - Obecność trendu w obserwowanym (mierzonym) sygnale wyjściowym jest przyczyną obciążalności estymatorów wpływając w znacznym stopniu na dokładność wyznaczania charakterystyk częstotliwościowych obiektu. Zachodzi więc konieczność jego usuwania.