Symmetry Rigid Motion Patterns Andrew Samuels Symmetry is



 – the act of taking an object and moving")




























 with")
 from the axis")


- Slides: 41
Symmetry, Rigid Motion & Patterns Andrew Samuels
Symmetry is a property of an object that looks the same to an observer standing a different vantage points.
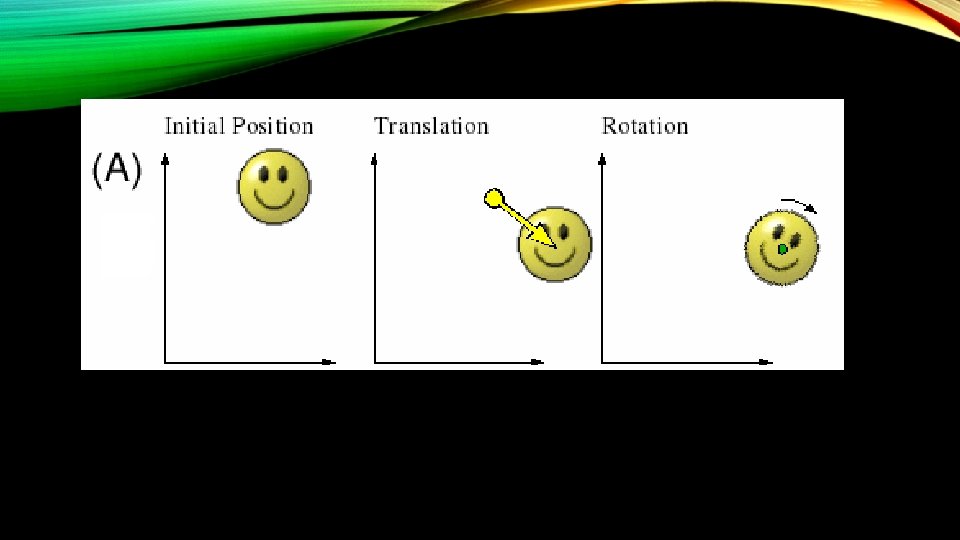
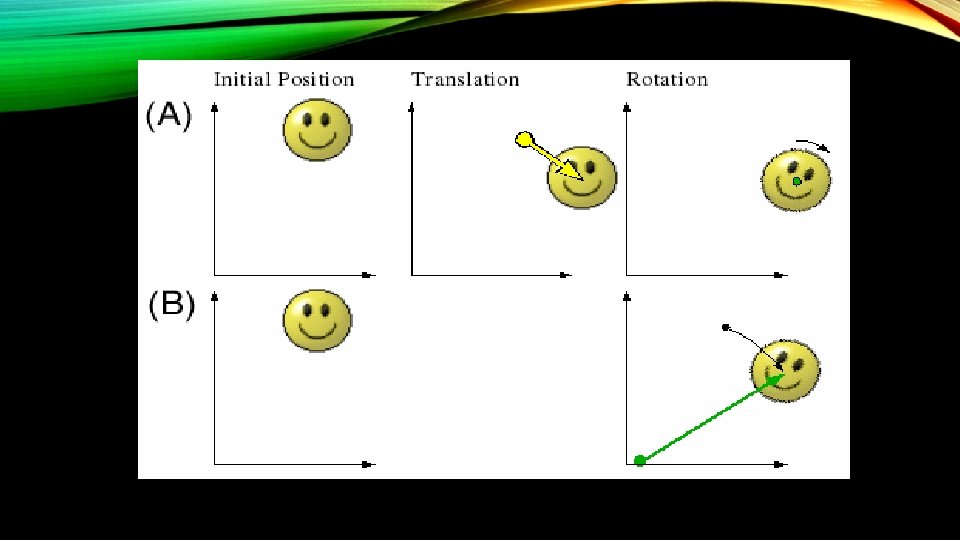
One can think of symmetry as having to do with ways to move an object so that when all the moving is finished, the object looks exactly as it did before.
Rigid motion (sometimes an isometry) – the act of taking an object and moving it from some starting position to some ending position without altering its shape or size.
If in the process of moving the object, it becomes stretched, torn, or altered in shape or size, the motion is not a rigid motion.
Since in a rigid motion, the size and shape of an object are preserved, distances between points on the object are preserved.
When defining rigid motions, we are totally result oriented (i. e. we are only concerned with the net effect of the motion). We only care where the object started and where it ended, what happened during the trip is irrelevant.
This implies that a rigid motion is completely defined by the starting and ending positions of the object being moved. Equivalent rigid motions move an object from the same starting position to the same ending positon.
For the scope of our discussion, we will limit ourselves to two-dimensional objects and shapes in a plane. There are four Basic rigid motions of the plane: reflection, rotation, translation, and glide reflection.
Terms – the object’s starting positon shall be P the ending position shall be P’ A rigid motion of the plane shall be noted as M, so the rigid motion M moves P to P’. It may happen that a rigid motion M moves P’ back to P again, in this case we call P a fixed point of the rigid motion M.
Reflections A reflection is a mirror image of the starting position. The “mirror” is a line called the axis of reflection l.
Here the axis of reflection l is the x-axis of the graph and cuts through the triangle. The points where l intersects the triangle are fixed points of the triangle.
Property 1 – If we know the axis of reflection, we can find the image of any point P under the reflection (just drop a perpendicular to the axis l through P and find the point on the other side of the axis that is at an equal distance). A reflection is completely determined by the axis of reflection l.
Property 2 – If we know a point P and its image P’ under reflection, we can find the axis l of the reflection – it is the perpendicular bisector of segment PP’. Once we have the axis l of the reflection, we can find the image of any other point.
Property 3 – The fixed points of a reflection are all the points on the axis of reflection l.
Property 4 – Reflections are improper rigid motions, meaning they change the left-right and clockwise-counterclockwise orientations of objects.
Property 5 – If P’ is the image of P under a reflection, then (P’)’ = P (i. e. the image of the image is the original point). Applying the same reflection twice results in the equivalent of the object not having moved at all. A rigid motion yielding this result is called the identity motion.
Properties of Reflection A reflection is completely determined by its axis l A reflection is completely determined by a single point-image pair P and P’ (when P ≠ P’) A reflection has infinitely many fixed points (all points on l) A reflection is an improper rigid motion When the same reflection is applied twice, we get the identity motion
Rotations A rotation in the plane is a rigid motion that pivots or swings an object around a fixed point O. O is known as the rotocenter (acts as the center of the rotation). The angle of rotation is the measure of an angle indicating the amount of rotation – clockwise or counterclockwise. A rotation is defined by these two pieces of information.
Property 6 – A 360⁰ rotation is equivalent to a 0⁰ rotation, and a 0⁰ rotation is just the identity motion.
Property 7 – When an object is rotated, the left-right and clockwise-counterclockwise orientations are preserved. When this is true, it is called a proper rigid motion.
Property 8 – In every rotation, the rotocenter is a fixed point, and except for the case of the identity it is the only fixed point.
Property 9 – A rotation cannot be determined by a single point-image pair P and P’
Property 9 – A rotation cannot be determined by a single point-image pair P and P’
Property 9 – A rotation cannot be determined by a single point-image pair P and P’
Properties of Rotations A 360⁰ rotation is equivalent to the identity motion. A rotation is a proper rigid motion. A rotation that is not the identity motion has only one fixed point, its rotocenter. A rotation is completely determined by two point-image pairs.
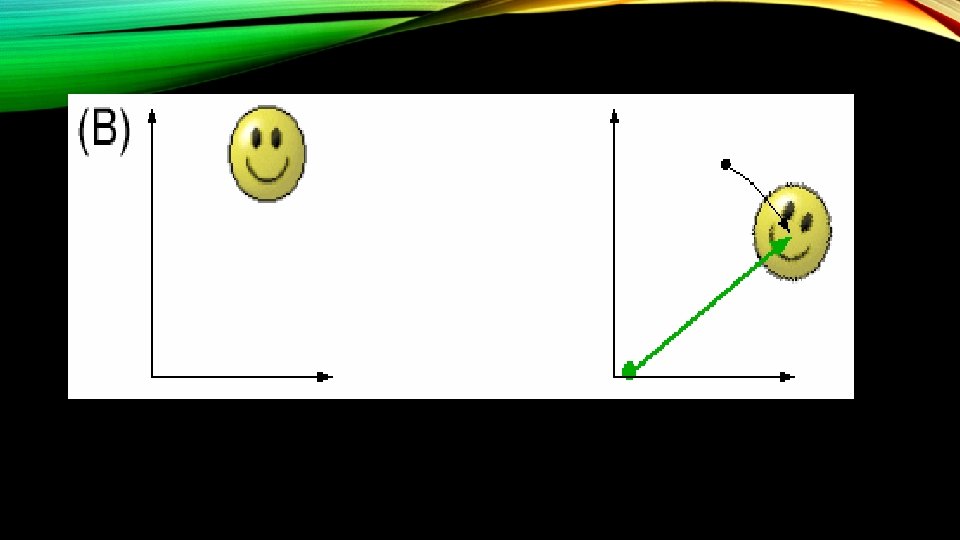
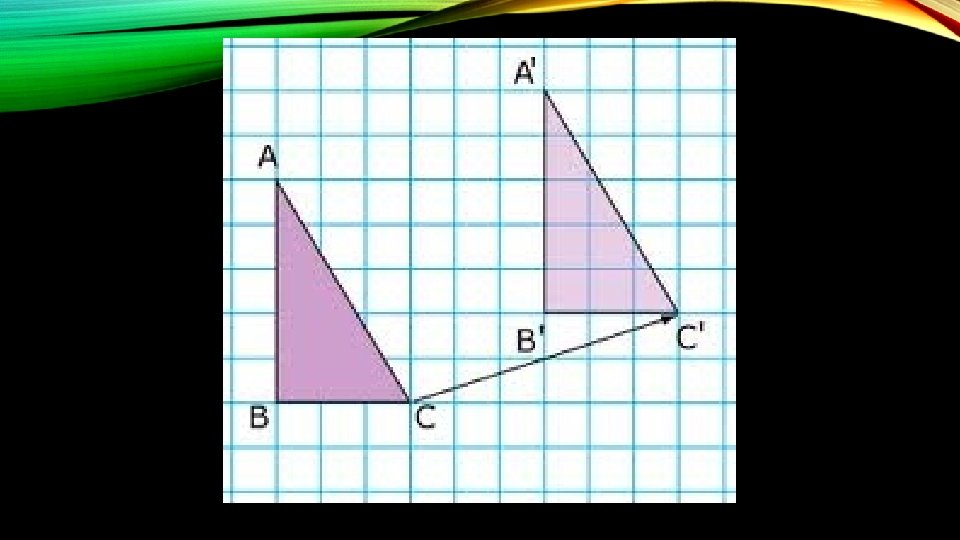
Translations A translations happens by dragging an object in a specified direction and by a specified amount (the length of the translation). By combining these two pieces of information (direction and length), the vector of translation is determined, usually denoted by v and represented by an arrow. The arrow points in the direction of the translation and the length of the arrow is the length of the translation.
Property 10 – If we are given a point P and its image P’ the arrow joining P to P’ gives the vector of the translation. Once we know the vector of translation, we can determine where the translation moves any other point. A single pointimage pair P and P’ is all we need to completely determine the translation.
Property 11 – In a translation, every point gets moved some distance and in some direction, so a translation has no fixed points.
Property 12 – When an object is translated, leftright and clockwise-counterclockwise orientations are preserved. Translations are proper rigid motions.
Property 13 – The effect of a translation with vector v can be undone by a translation of the same length but in the opposite direction by vector –v when this occurs, we have the equivalent of the identity motion.
Properties of Translations A translation is completely determined by a single point-image pair P and P’ A translation has no fixed points A translation is a proper rigid motion When a translation with vector v is followed with a translation with vector –v the result is the identity motion
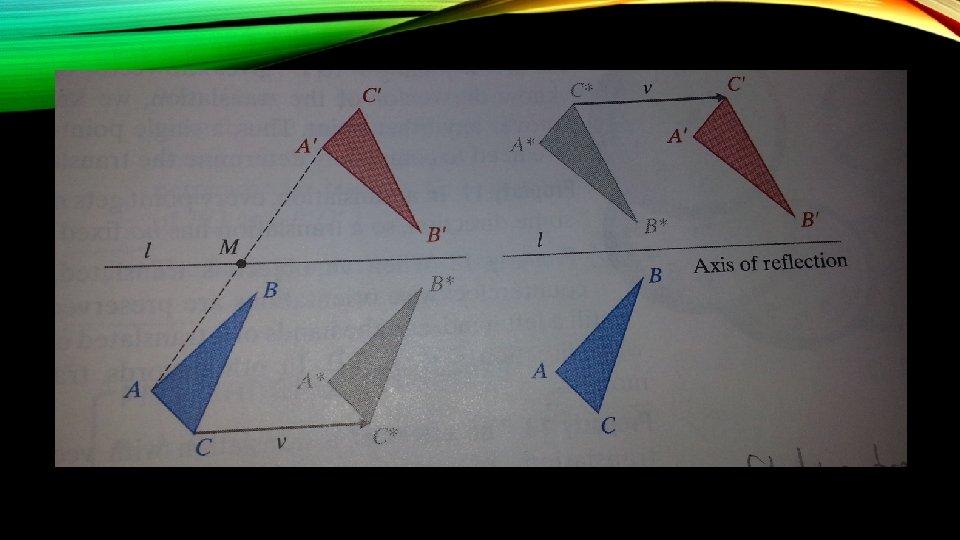
Glide Reflections A glide reflection is a rigid motion combining a translation (glide) with a reflection. The axis of reflection must be parallel to the direction of translation. Glide reflections are described by the vector of the translation v and the axis of reflection l. v and l must be parallel.
Any point and its image are on opposite sides (but equidistant) from the axis of reflection l. This implies that the midpoint of the segment joining a point to its image must fall on the axis of reflection l.
Property 14 – A fixed point of a glide reflection would have to be a point that ends up exactly where it started after it is first translated and then reflected. This cannot happen because the translation moves every point and the reflection cannot undo the action of the translation. It follows that a glide reflection has no fixed points.
Property 15 – A glide reflection is a combination of a proper rigid motion (translation) and an improper rigid motion (reflection). Therefore a glide reflection is an improper rigid motion.