NDEKLER AKIKAN KNEMAT Hz Alan vme Alan Kontrol






 uygulayabilmek için akışkan partikülünün ivmesinin uygun")

 hem")
- Slides: 23
İÇİNDEKİLER AKIŞKAN KİNEMATİĞİ Hız Alanı İvme Alanı Kontrol Hacmi ve Sistem Tanımları Reynolds Transport Teoremi
4. BÖLÜM AKIŞKAN KİNEMATİĞİ
Hız Alanı
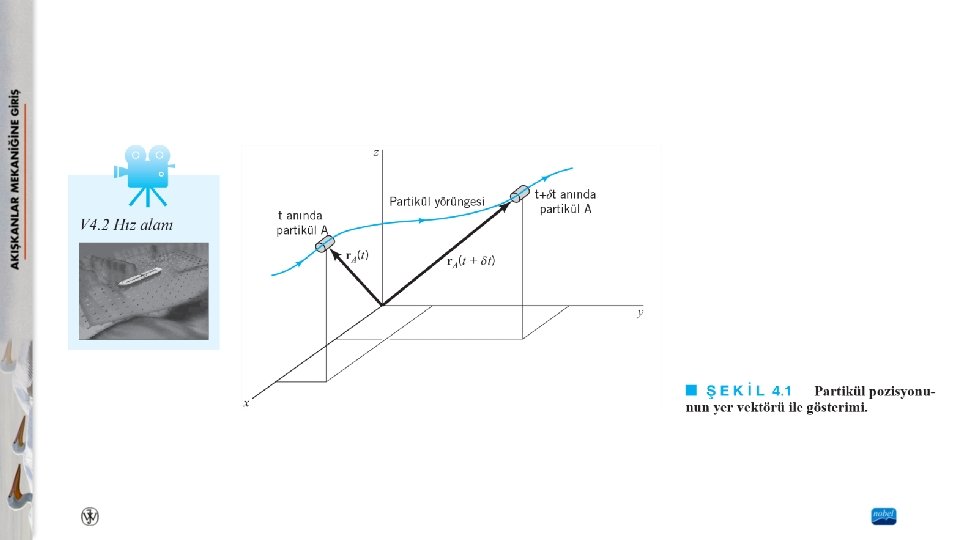
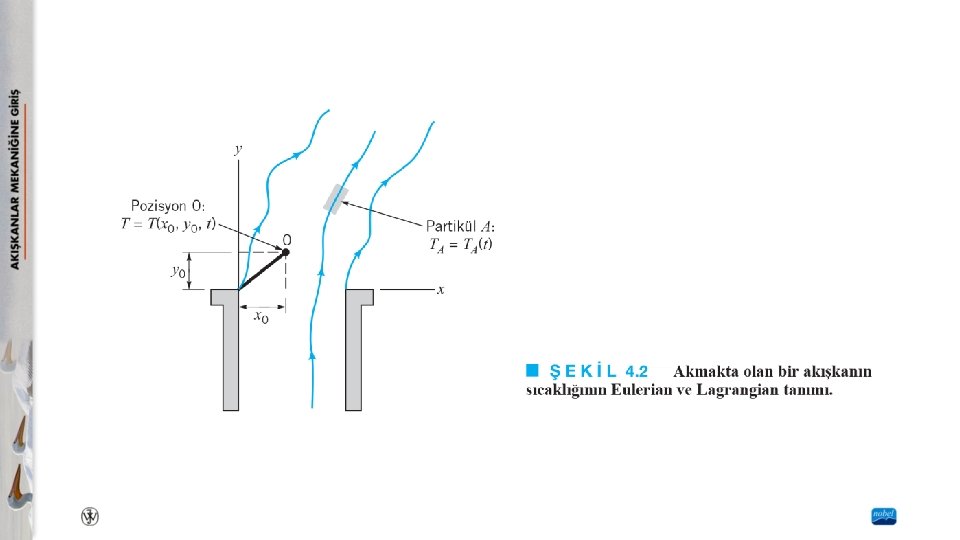
4. 1. 1 Eulerian ve Lagrangian Akış Tanımları Akışkanlar mekaniği problemlerini analiz etmek için iki genel yaklaşım vardır. Birincisi Eulerian metottur ve daha önce açıklandığı gibi bu metot alan kavramını kullanır. Bu yaklaşımda, akışkan hareketi, gerekli özellikler (basınç, yoğunluk, hız vb. ) pozisyonun ve zamanın fonksiyonu olarak ifade edilerek tanımlanır. Bu metotla, akışkan partikülleri akış alanı içerisindeki sabit noktalardan geçerken bu noktalarda neler olduğunu belirleyerek akışla ilgili bilgi elde ederiz. İkinci metot, Lagrangian metodu olarak adlandırılır. Bu metot, akmakta olan akışkan partiküllerinin tek takibini kapsar. Partiküllerin akışın özelliklerini nasıl değiştirdiği zamanın fonksiyonu olarak belirlenir. Bunun için, hareket hâlindeki akışkan partikülleri “etiketlenir” ve özellikleri belirlenir.
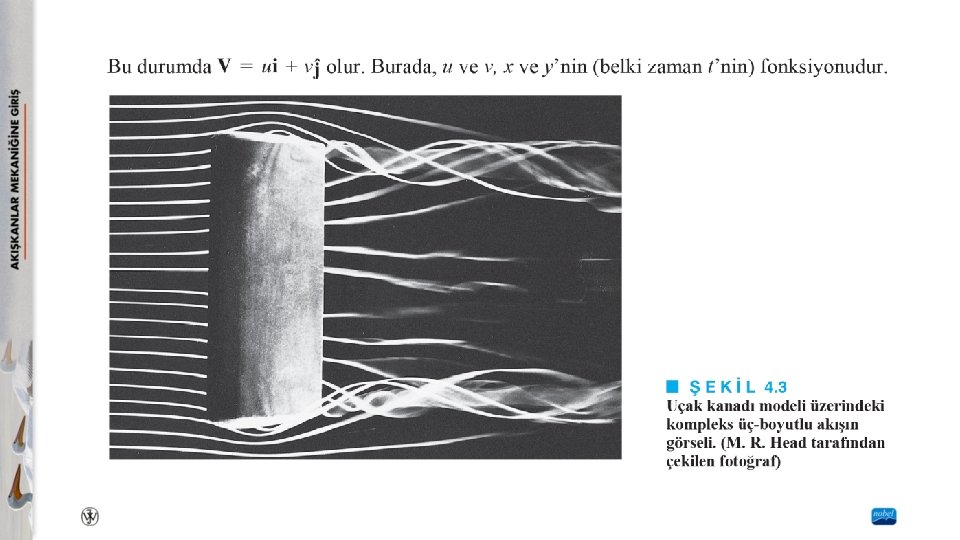
4. 1. 2 Bir, İki ve Üç-Boyutlu Akışlar Gerçekte hemen bütün akışlarda, hız alanının üç hız bileşeni (örneğin u, v ve w) vardır. Çok sayıda akış için, üç-boyutlu akış karakteristikleri, akışın oluşturduğu fiziksel etkiler açısından önemlidir. Şekil 4. 3’te verilen uçak kanadı üzerindeki akışın fotoğrafı incelenerek akışın üç-boyutlu yapısı hissedilebilir. Bazı akışlarda, hız bileşenlerinden birinin etkisi diğer bileşenlere göre (bazı açılardan) küçük olabilir. Bu tür akışlarda, küçük hız bileşeni ihmal edilebilir ve akış iki-boyutlu kabul edilir.
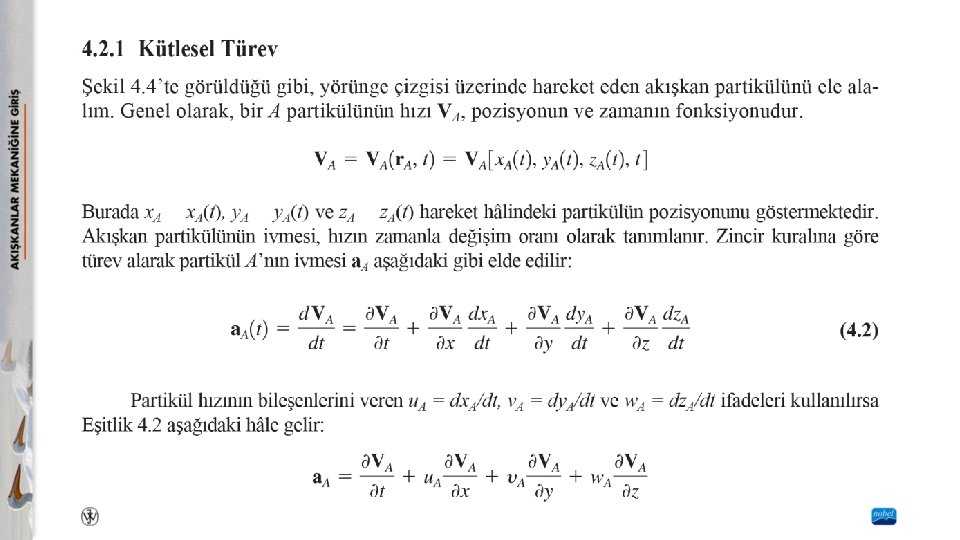
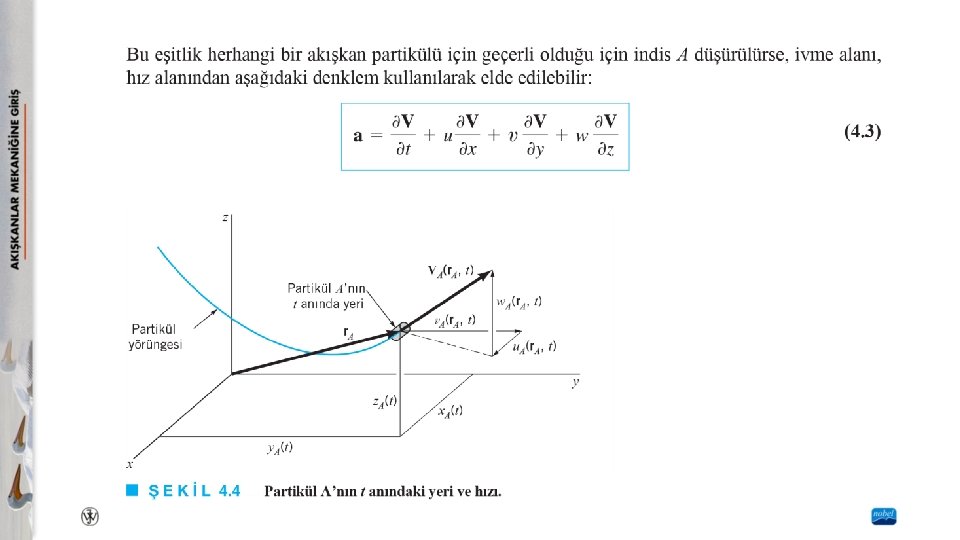
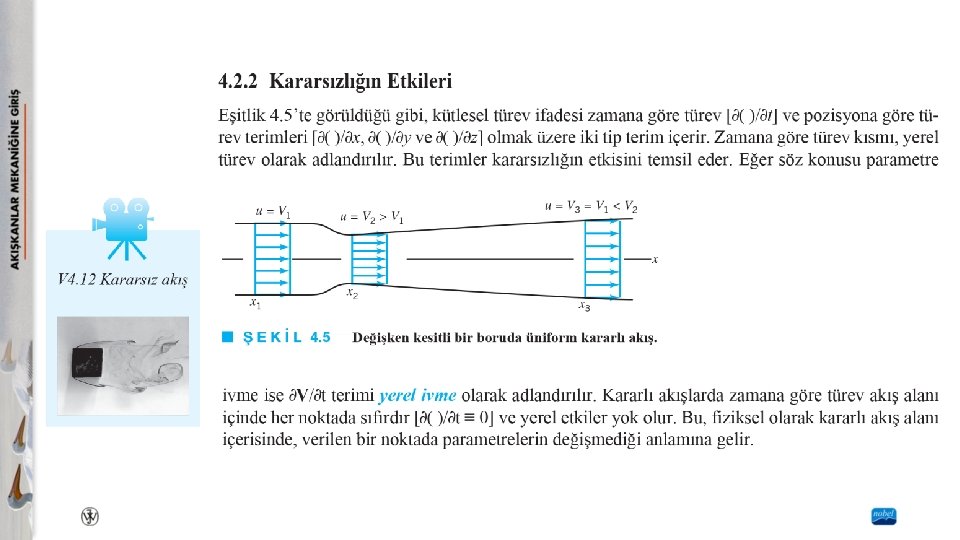
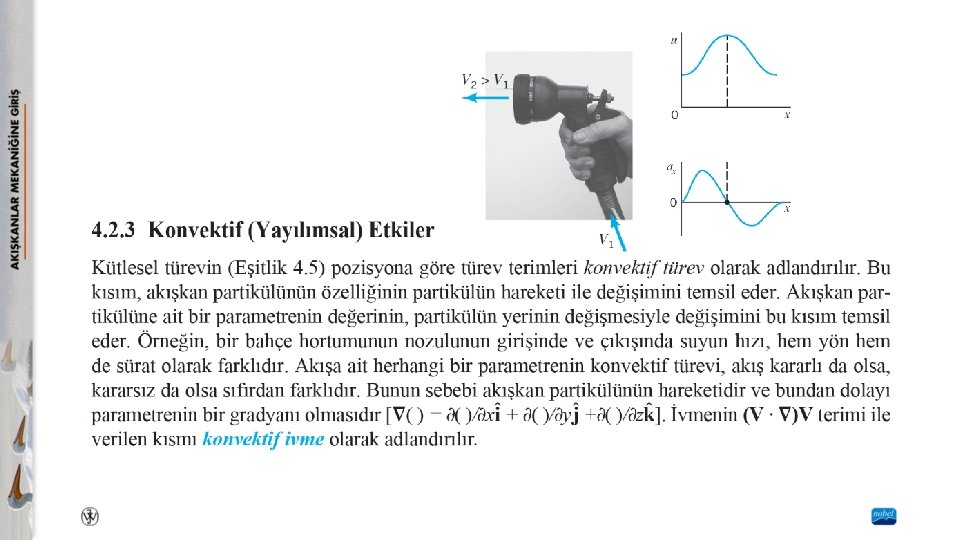
İvme Alanı Newton’un ikici kanununu (F = ma) uygulayabilmek için akışkan partikülünün ivmesinin uygun bir şekilde ifade edilmesi gerekir. Akışkanlar mekaniğinde çok az kullanılan Lagrangian metodunda, her bir akışkan partikülünün ivmesi katı cisim dinamiğinde olduğu gibi, a = a(t) olarak tanımlanır. Eulerian metodunda, ivme alanı zamanın ve pozisyonun fonksiyonu olarak tanımlanır. Bu tanımlamada herhangi bir akışkan partikülü takip edilmez. Bu yaklaşım, her bir partikülün hızını tanımlamak yerine hız alanının V = V(x, y, z, t) ile tanımlanmasına benzer.
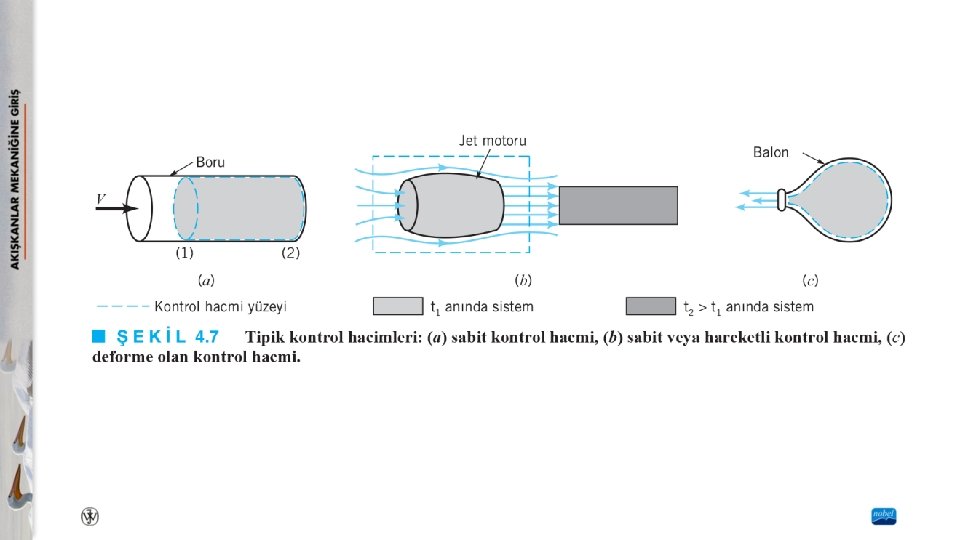
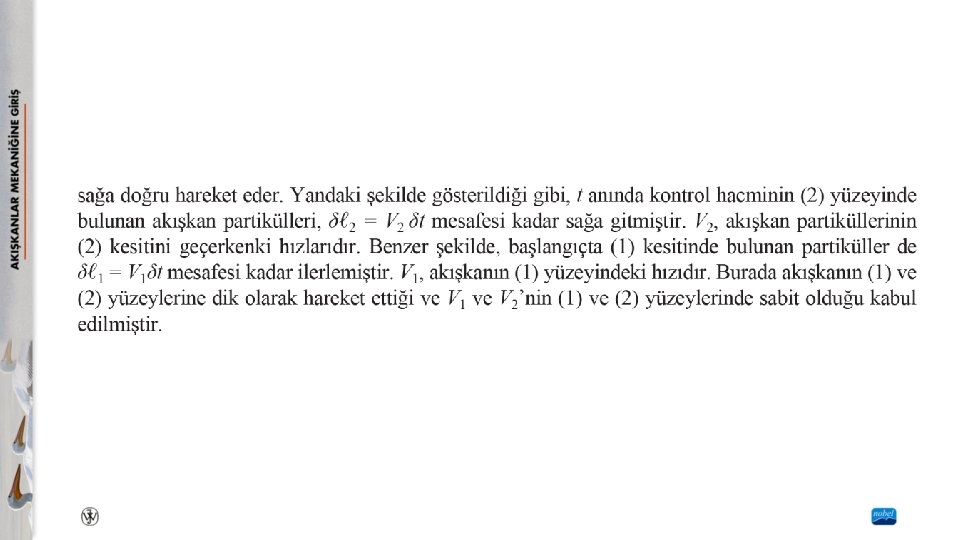
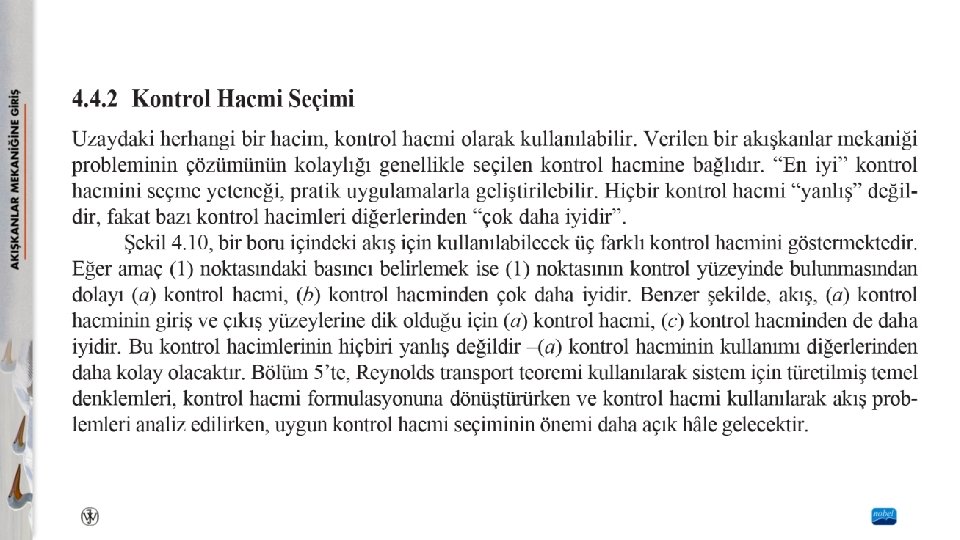
Kontrol Hacmi ve Sistem Tanımları Bir akışkanın davranışı, temel fizik kanunlarına bağlıdır. Bu temel kanunlar uygun matematiksel denklemlerle ifade edilebilir. Kütlenin korunumu kanunu, Newton’un hareket kanunun ve termodinamik kanunlarının uygulaması akışkanlar mekaniği analizlerinin temelini oluşturur. Sistem ve kontrol hacmi yaklaşımları başta olmak üzere, bu temel kanunlar bir akışkana değişik yöntemlerle uygulanabilir. Sistem, kütlesi sabit olan seçilmiş madde olarak tanımlanır. Sistem içinde her zaman aynı atomlar veya akışkan partikülleri bulunur. Bu sabit kütledeki madde hareket edebilir, akabilir ve çevresi ile etkileşim hâlinde olabilir. Kontrol hacmi, uzayda seçilmiş bir hacim (kütleden bağımsız geometrik bir varlık) olarak tanımlanır. Kontrol hacminin içinden akışkan akarak geçebilir.
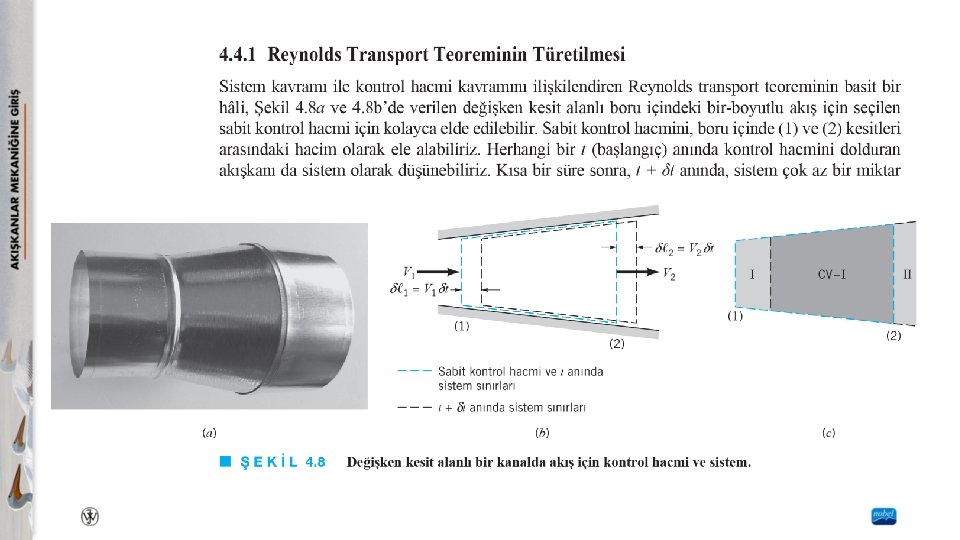
Reynolds Transport Teoremi Akışkan hareketinin temel denklemlerini hem sistem (belirli bir akışkan kütlesi) hem de kontrol hacmi (belirli bir hacim) yaklaşımlarını kullanarak tanımlamamız gerekir. Bunu yapabilmek için, bir yaklaşımdan, diğerine geçmemizi sağlayan analitik bir araca ihtiyaç vardır. Reynolds teoremi bunun için uygun bir araçtır. Bütün fiziksel kanunlar hız, ivme, kütle, sıcaklık ve momentum gibi parametreler cinsinden ifade edilir. B’nin bu parametreleri (veya başka bir parametreyi) ve b’nin ise bu parametreleri birim kütle için temsil ettiğini düşünelim. Buna göre şu ilişki yazılabilir: B = mb Burada m ilgilen akışkanın kütlesidir.