Mekanizma Teknii Drt Uzuvlu Dzlemsel Mekanizmalar DR R



; % Freduenstein Denkleminde Saðlama Noktalarýnýn % Yerine")

; xlabel('Giriþ Açýsý theta_{12}'), ylabel('Çýkýþ Açýsý theta_{14}'); legend('Kinematik Analiz', 'Fonsiyon")
=gab; %%EKK Saðlama Noktalarýnýn Belirlenmesi for k=2:")
![% Hata Oranlarýnýn Karþýlaþtýrýlmasý figure; plot([3: 10], e_c*ones(length([3: 10]), 1)); hold on; plot([3: 10],](https://slidetodoc.com/presentation_image_h2/43912bf84bb8f6787b3c1ef73d50b0ee/image-8.jpg "% Hata Oranlarýnýn Karþýlaþtýrýlmasý figure; plot([3: 10], e_c*ones(length([3: 10]), 1)); hold on; plot([3: 10],")









 Sentezi")
 Sentezi Şekilde görülen Kol-Kızak Mekanizmasında, tasarım kriteri C noktasının")
 Sentezi")


![s=[99. 69; 82. 50; 39. 03]; Q=[51. 03; 90; 129]*pi/180; B=s. *s; A=[s. *cos(Q)](https://slidetodoc.com/presentation_image_h2/43912bf84bb8f6787b3c1ef73d50b0ee/image-28.jpg "s=[99. 69; 82. 50; 39. 03]; Q=[51. 03; 90; 129]*pi/180; B=s. *s; A=[s. *cos(Q)")
 sentezi")
 sentezi Whitworth çabuk dönüş mekanizmaları iki ölü konum")
 sentezi")
 sentezi")
 sentezi")
- Slides: 33
Mekanizma Tekniği Dört Uzuvlu Düzlemsel Mekanizmalar DR. ÖĞR. ÜYESİ NURDAN BİLGİN KAYNAKLAR: 1. THEORY OF MACHINES, R. S. KHURMI, J. K. GUPTA
Örnek
clear all; close all; clc; r 2=100; % Giriş Kolu Uzunluðu gab=0; %Giriş Açşsý Başlangýç Deðeri gas=pi/3; %Giriş Açýsý Son Deðeri n=3; %Chebishev dga=gas-gab; %Giriş Kolu Çalýşma Aralýðý a=pi/3; % alpha açýsý %%Chebishev Saðlama Noktalarýnýn Belirlenmesi for k=1: n ga(k)=gab+dga*(1 -cos((k-1/2)*a))/2 ; end
%Verilen Fonksiyona Göre Çýkýþ Açýsýnýn Belirlenmesi ca=exp(ga); % Freduenstein Denkleminde Saðlama Noktalarýnýn % Yerine Konularak K deðerlerinin Hesaplanmasý A=[cos(ca') -cos(ga') ones(3, 1)]; B=[cos(ga'-ca')]; K=AB; %Uzuv Boyutlarýnýn Belirlenmesi r 1=r 2*K(1); r 4=r 1/K(2); r 3=sqrt(2*r 4*K(3)+r 1^2+r 2^2+r 4^2); %Uzuv Boyutlarýnýn pozitif Deðere dönüþtürülmesi r 1=r 1*sign(r 1); r 3=r 3*sign(r 1); r 4=r 4*sign(r 1);
clear ga ca A B %Giriþ Açýsý Aralýðýnýn dga/100 adým aralýðýna bölünmesi ve %Fonksiyonda yerine konularak Çýkýþ Açýsýnýn Elde edilmesi gam=[gab: (gas-gab)/100: gas]; cam=exp(gam); % Kinematik Analiz for i=1: length(gam) ga=gam(i); A=2*r 4*(r 1+r 2*cos(ga)); B=2*r 4*sin(ga); C=r 1^2+r 2^2+r 4^2+2*r 1*r 2*cos(ga)-r 3^2; D=sqrt(A^2+B^2); phi=atan 2(B, A); ca(i)=phi+acos(C/D); end
figure; plot(gam, ca, gam, cam); xlabel('Giriþ Açýsý theta_{12}'), ylabel('Çýkýþ Açýsý theta_{14}'); legend('Kinematik Analiz', 'Fonsiyon Deðeri'); e_c=100*max(abs(ca-cam)); % Yüzde Maksimum Hata
j=1; clear n ga for n=4: 11 ga(1)=gab; %%EKK Saðlama Noktalarýnýn Belirlenmesi for k=2: n ga(k)=ga(k-1)+dga/(n-1); end ca=exp(ga); A=[cos(ca') -cos(ga') ones(n, 1)]; B=[cos(ga'-ca')]; K=inv(A'*A)*(A'*B); r 1=r 2*K(1); r 4=r 1/K(2); r 3=sqrt(-2*r 4*K(3)+r 1^2+r 2^2+r 4^2); r 1=r 1*sign(r 1); r 3=r 3*sign(r 1); r 4=r 4*sign(r 1); clear ga ca A B gam=[gab: (gas-gab)/100: gas]; cam=exp(gam); % Kinematik Analiz for i=1: length(gam) ga=gam(i); A=2*r 4*(r 1+r 2*cos(ga)); B=2*r 4*sin(ga); C=r 1^2+r 2^2+r 4^2+2*r 1*r 2*cos(ga)-r 3^2; D=sqrt(A^2+B^2); phi=atan 2(B, A); ca(i)=phi+acos(C/D); end e(j)=100*max(abs(ca-cam)); j=j+1; % Yüzde Maksimum Hata end
% Hata Oranlarýnýn Karþýlaþtýrýlmasý figure; plot([3: 10], e_c*ones(length([3: 10]), 1)); hold on; plot([3: 10], e, 'r--*', 'Marker. Size', 10); xlabel('n'), ylabel('Hata (% e)_{maks}'); legend('Chebishev', 'EKK')
Ödev Soru 1: Giriş kolu- Çıkış kolu açıları arasında aşağıdaki ilişkiyi tesis edecek dört çubuk mekanizmasını tasarlayınız. Giriş uzvunun uzunluğunu 10 cm olarak alınız. Uyum Noktaları Giriş Kolu Açısı Çıkış Kolu Açısı 1 2 3
% Ödev 1 clear all; close all; clc; r 2=10; % Giriþ Kolu Uzunluðu ga=[15 30 45]*pi/180 ; ca=[30 40 55]*pi/180 ; A=[cos(ca') -cos(ga') ones(3, 1)]; B=[cos(ga'-ca')]; K=inv(A)*B; %Uzuv Boyutlarýnýn Belirlenmesi r 1=r 2*K(1); r 4=r 1/K(2); r 3=sqrt(-2*r 4*K(3)+r 1^2+r 2^2+r 4^2); %Uzuv Boyutlarýnýn pozitif Deðere dönüþtürülmesi r 1=r 1*sign(r 1); r 3=r 3*sign(r 3); r 4=r 4*sign(r 3); x 3=(r 1)+r 4*cos(ca(1)); x=[0 r 2*cos(ga(2)) r 1+r 4*cos(ca(2))]; y=[0 r 2*sin(ga(2)) r 4*sin(ca(2))]; x 1=[r 1 r 1+r 4*cos(ca(2))]; y 1=[0 r 4*sin(ca(2))]; plot(x, y, 'r--*', 'Marker. Size', 10); hold on; plot(x 1, y 1, 'r--*', 'Marker. Size', 10); hold on; str = sprintf('r 1=%0. 2 f, r 2=%0. 2 f, r 3=%0. 2 f ve r 4=%0. 2 f. ', r 1, r 2, r 3, r 4); annotation('textbox', [0. 2, 0. 4, 0. 1], 'String', str); R=['r 1'; 'r 2'; 'r 3'; 'r 4']; r=[r 1; r 2; r 3; r 4]; k=['k 1'; 'k 2'; 'k 3'; '00']; k_deg=[K; 0]; T=table(R, r, k, k_deg)
R r k k_deg __ _______ r 1 8. 9873 k 1 0. 89873 r 2 10 k 2 1. 0885 r 3 6. 6593 k 3 1. 239 r 4 8. 2569 00 0
Ödev 2
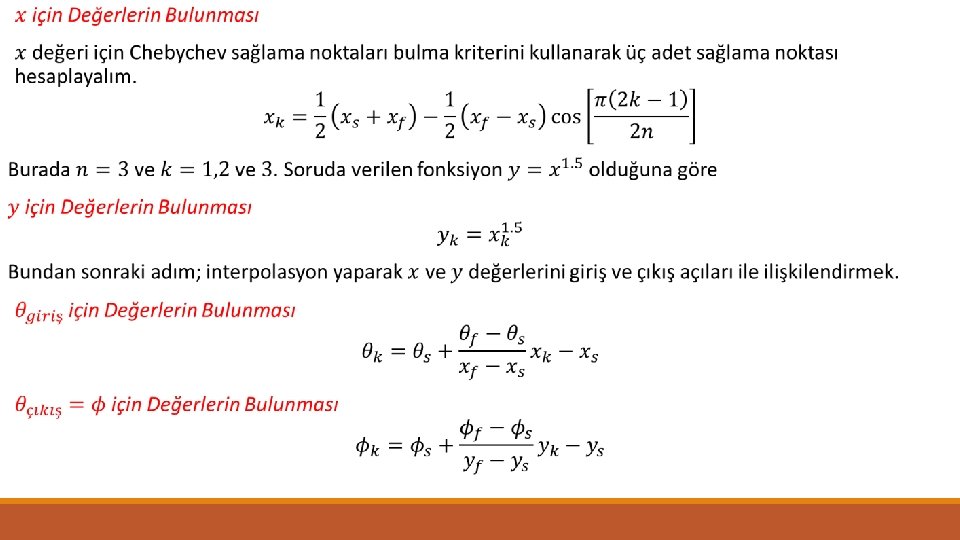
clear all; close all; clc; r 1=25; n=3; % Giriþ Kolu Uzunluðu, sağlama noktası sayısı xb=1; gab=30*pi/180; cab=90*pi/180; %Giriþ Açýsý Baþlangýç Deðeri xs=4; gas=120*pi/180; cas=180*pi/180; %Giriþ Açýsý Son Deðeri %Chebishev dx=xs-xb; a=pi/3; %Giriþ Kolu Çalýþma Aralýðý ve % alpha açýsý dy=xs^(1. 5)-xb^(1. 5); %Çýkýþ Kolu Çalýþma Aralýðý %%Chebishev Saðlama Noktalarýnýn Belirlenmesi for k=1: 3 x(k)=(xs+xb)/2 -dx/2*cos(pi*(2*k-1)/(2*n)) ; ga(k)=gab+((x(k)-xb)*(gas-gab))/(xs-xb); y(k)=x(k)^(1. 5); ca(k)=cab+((y(k)-xb^(1. 5))*(cas-cab))/(xs^(1. 5)-xb^(1. 5)); end A=[cos(ca') -cos(ga') ones(3, 1)]; B=[cos(ga'-ca')]; K=inv(A)*B r 2=r 1/K(1); r 4=r 1/K(2); r 3=sqrt(-2*r 4*K(3)+r 1^2+r 2^2+r 4^2); %Uzuv Boyutları r 2=r 2*sign(r 2); r 3=r 3*sign(r 3); r 4=r 4*sign(r 4); %Uzuv Boyutlarýnýn pozitif Deðere dön. x=[0 r 2*cos(ga(1)) r 1+r 4*cos(ca(1))]; y=[0 r 2*sin(ga(1)) r 4*sin(ca(1))]; x 1=[r 1 r 1+r 4*cos(ca(1))]; y 1=[0 r 4*sin(ca(1))]; plot(x, y, 'r--*', 'Marker. Size', 10); hold on; plot(x 1, y 1, 'r--*', 'Marker. Size', 10); hold on; str = sprintf('Boyutlar r 1=%0. 2 f, r 2=%0. 2 f, r 3=%0. 2 f ve r 4=%0. 2 f. ', r 1, r 2, r 3, r 4); annotation('textbox', [0. 2, 0. 4, 0. 1], 'String', str)
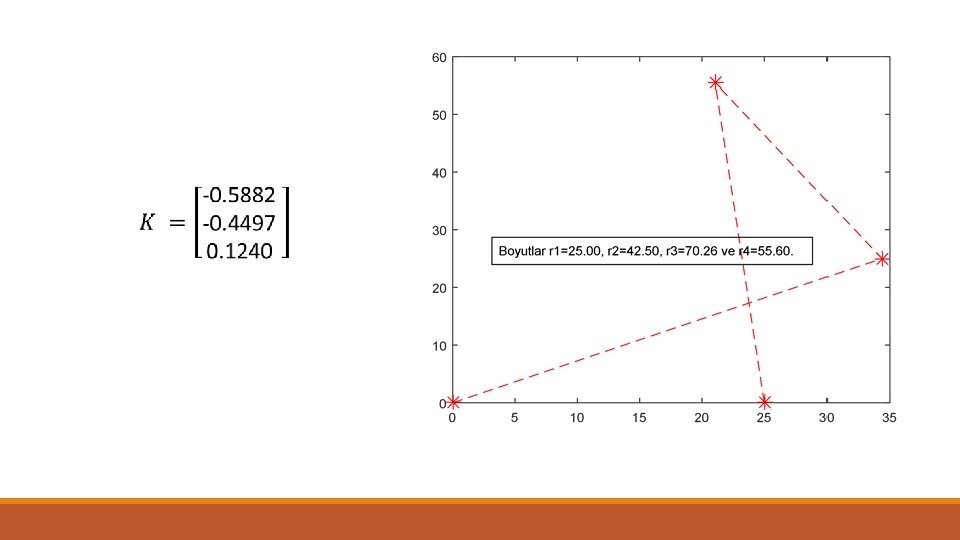
Ödev 3 Soru 3: Freudenstein denklemini kullanarak aşağıdaki şartları sağlayacak dört çubuk mekanizmasını tasarlayınız. Giriş Kolu Açısı Konum Hız İvme Çıkış Kolu Açısı
clear all; close all; clc; r 1=100; ga=60*pi/180; ca=90*pi/180; w 12=5; w 14=2; a 12=2; a 14=7; A=[cos(ca) -cos(ga) 1; (-sin(ca)*w 14) -(-sin(ga)*w 12) 0; (-cos(ca)*w 14^2 -sin(ca)*a 14) -(-cos(ga)*w 12^2 -sin(ga)*a 12) 0]; B=[cos(ga-ca); -sin(ga-ca)*(w 12 -w 14); -cos(ga-ca)*(w 12 -w 14)^2 -sin(ga-ca)*(a 12 -a 14)]; K=inv(A)*B %Uzuv Boyutlarýnýn Belirlenmesi r 2=r 1/K(1); r 4=r 1/K(2); r 3=sqrt(-2*r 4*K(3)+r 1^2+r 2^2+r 4^2); %Uzuv Boyutlarýnýn pozitif Deðere dönüþtürülmesi r 2=r 2*sign(r 2); r 3=r 3*sign(r 3); r 4=r 4*sign(r 4); x=[0 r 2*cos(ga(1)) r 1+r 4*cos(ca(1))]; y=[0 r 2*sin(ga(1)) r 4*sin(ca(1))]; x 1=[r 1 r 1+r 4*cos(ca(1))]; y 1=[0 r 4*sin(ca(1))]; plot(x, y, 'r--*', 'Marker. Size', 10); hold on; plot(x 1, y 1, 'r--*', 'Marker. Size', 10); hold on; str = sprintf('Boyutlar r 1=%0. 2 f, r 2=%0. 2 f, r 3=%0. 2 f ve r 4=%0. 2 f. ', r 1, r 2, r 3, r 4); annotation('textbox', [0. 2, 0. 4, 0. 1], 'String', str)
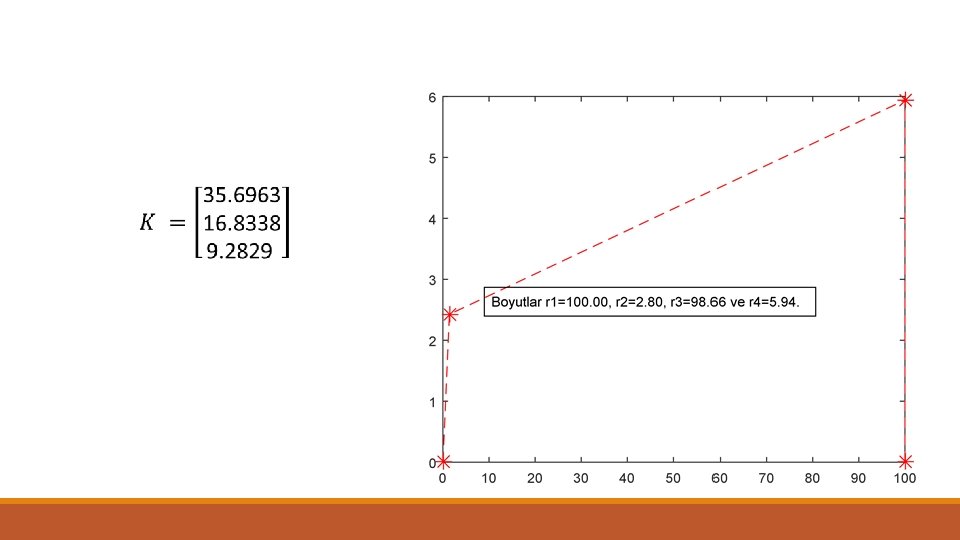
Ödev
clear all; close all; clc; r 1=52. 5; n=3; % Giriþ Kolu Uzunluðu xb=0; gab=0; cab=0; %Giriþ Açýsý Baþlangýç Deðeri xs=pi/2; gas=120*pi/180; cas=60*pi/180; %Giriþ Açýsý Son Deðeri dx=xs-xb; %Giriþ Kolu Çalýþma Aralýðý dy=sin(xs)-sin(xb); %Çýkýþ Kolu Çalýþma Aralýðý a=pi/3; % alpha açýsý for k=1: 3 %%Chebishev Saðlama Noktalarýnýn Belirlenmesi x(k)=(xs+xb)/2 -dx/2*cos(pi*(2*k-1)/(2*n)) ; ga(k)=gab+((x(k)-xb)*(gas-gab))/(xs-xb); y(k)=sin(x(k)); ca(k)=cab+((y(k)-sin(xb))*(cas-cab))/(sin(xs)-sin(xb)); end q 1=105*pi/180; f=q 1 -ga(1); ga=ga+ones(1, 3)*f; f 1=66*pi/180; f=f 1 -ca(1); ca=ca+ones(1, 3)*f; A=[cos(ca') -cos(ga') ones(3, 1)]; B=[cos(ga'-ca')]; K=inv(A)*B; r 2=r 1/K(1); r 4=r 1/K(2); r 3=sqrt(-2*r 4*K(3)+r 1^2+r 2^2+r 4^2); %Uzuv Boyutlar r 2=r 2*sign(r 2); r 3=r 3*sign(r 3); r 4=r 4*sign(r 4); %Uzuv Boyutlarýnýn pozitif Deðere dön x=[0 r 2*cos(ga(1)) r 1+r 4*cos(ca(1))]; y=[0 r 2*sin(ga(1)) r 4*sin(ca(1))]; x 1=[r 1 r 1+r 4*cos(ca(1))]; y 1=[0 r 4*sin(ca(1))]; plot(x, y, 'r--*', 'Marker. Size', 10); hold on; plot(x 1, y 1, 'r--*', 'Marker. Size', 10); hold on; str = sprintf('Boyutlar r 1=%0. 2 f, r 2=%0. 2 f, r 3=%0. 2 f ve r 4=%0. 2 f. ', r 1, r 2, r 3, r 4); annotation('textbox', [0. 2, 0. 4, 0. 1], 'String', str)
Kol-Kızak Mekanizmasının (Slider Crank Mechanism) Sentezi
Kol-Kızak Mekanizmasının (Slider Crank Mechanism) Sentezi Şekilde görülen Kol-Kızak Mekanizmasında, tasarım kriteri C noktasının belirli bir aralıkta, istenen zaman diliminde değişmesidir. O halde, C noktasının konumu ile giriş açısı arasında bir ilişki kurmalıyız.
Kol-Kızak Mekanizmasının (Slider Crank Mechanism) Sentezi
Çözüm: İlk Adım Sağlama Noktalarının Belirlenmesi
Çözüm: Fonksiyona Göre Giriş Açılarının Bulunması İnterpolasyon x 100 45 x s 100 45 100 95, 31 51, 03 99, 69 65 34, 67 90, 000 128, 996 65 90, 00 82, 50 34, 67 129, 00 39, 03 30 135 30
s=[99. 69; 82. 50; 39. 03]; Q=[51. 03; 90; 129]*pi/180; B=s. *s; A=[s. *cos(Q) sin(Q) ones(3, 1)]; K=AB; a=K(1)/2; c=K(2)/(2*a); b=sqrt(K(3)+a^2+c^2); Boyut=['a'; 'b'; 'c']; Deger=[a; b; c]; table(K, Boyut, Deger)
Whitworth Çabuk dönüş mekanizmalarının (Quick. Return mechanism) sentezi
Whitworth Çabuk dönüş mekanizmalarının (Quick-Return mechanism) sentezi Whitworth çabuk dönüş mekanizmaları iki ölü konum arasında, gidiş dönüş süreleri birbirinden farklı olacak biçimde gidip gelen mekanizmalar olduğu bilinmektedir.
Whitworth Çabuk dönüş mekanizmalarının (Quick-Return mechanism) sentezi
Whitworth Çabuk dönüş mekanizmalarının (Quick-Return mechanism) sentezi
Whitworth Çabuk dönüş mekanizmalarının (Quick-Return mechanism) sentezi