Linear Control of Manipulators Robot Control System Block

Linear Control of Manipulators
")
Robot Control System • Block diagram – Robot dynamics – Feedback (position servo error) (velocity servo error) ü Nonlinear & MIMO (multi-input multi-output) control system 2

Modeling of a Single Joint • Effective Inertia – Torque balance equation effective inertia effective damping 3
 4")
Modeling of a Single Joint (Example) 4

Independent Joint Control • Highly geared manipulators – Nonlinear system → Linear system – MIMO → N independent SISO Joint controller = DC motor controller 5

DC Motor Modeling • 6

DC Motor Modeling • DC motor system • Closed-loop control system 7
 V Θ G(s)")
DC Motor Control • Closed-loop Control Θr E + - C(s) V Θ G(s) C(s): Controller Θ Θr t 8

DC Motor Control • PID Controller – Frequency Domain Θr + E + - + V G(s) Θ + 9

DC Motor Control • PID Controller – Time Domain Θr + E + - Error 크기에 비 례 + V G(s) Θ + Error 기울기에 비례 Error 면적에 비 례 10
 Rise Time Overshoot")
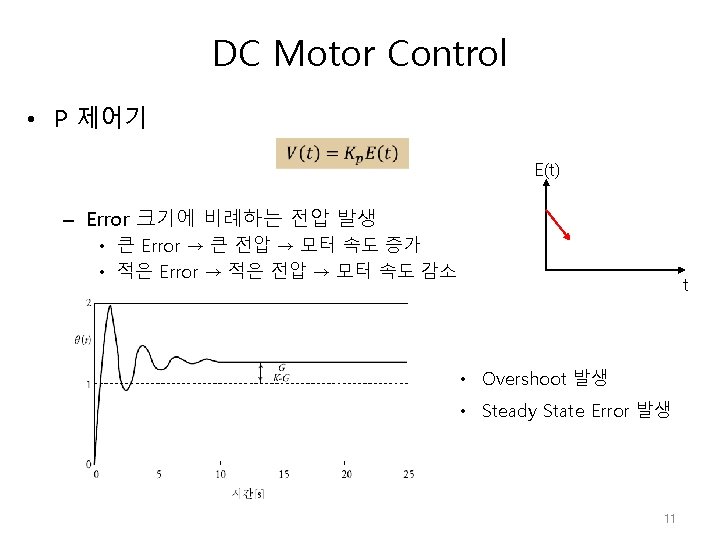
DC Motor Control • P 제어기 – Increasing Kp (P Gain) Rise Time Overshoot Settling Time Steady State Error Decrease Increase Small change Decrease 2. 0 1. 0 0. 5 12
 Rise Time Overshoot")
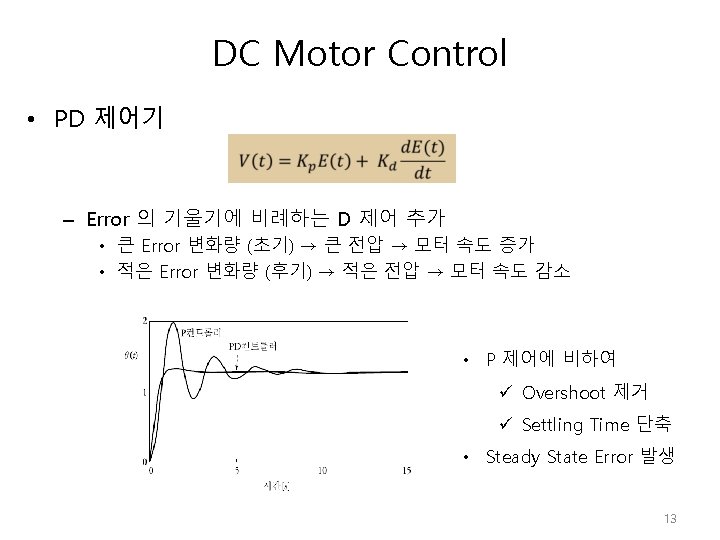
DC Motor Control • PD 제어기 – Increasing Kd (D gain) Rise Time Overshoot Settling Time Steady State Error Small change Decrease None 5 0 10 14
 Rise Time Overshoot")
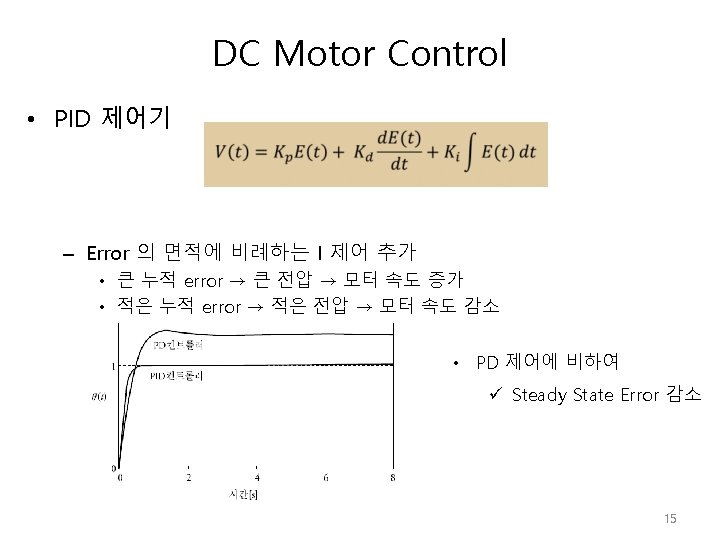
DC Motor Control • PID 제어기 – Increasing Ki (I gain) Rise Time Overshoot Settling Time Steady State Error Small change Increase Eliminate 16

PID Tuning • P, I, D Gain 의 관계 Rise Time Overshoot Settling Time Steady State Error Kp Decrease Increase Small change Decrease Kd Small change Decrease None Ki Small change Increase Eliminate 지능형 로봇 공학(사이텍미디어) 17
 로")
PID Tuning • Ziegler-Nichols Method – Plant 에 대한 step response (transient state) 로 부터 Kp, Kd, Ki 를 설정하는 실험적 방법 18

PID Tuning • Ziegler-Nichols Method-Case 1 – S-shaped step response 19

PID Tuning • Ziegler-Nichols Method-Case 2 20

Control of Second-Order System • damping ratio natural frequency 21

Control of Second-Order System • Control law • Closed-loop dynamics position-regulation system 22

Control-Law Partitioning • Controller Design – Model-based portion • System parameter related – Servo portion • Independent of system parameters Ø Can be used for nonlinear controller design 23
 1) Model based portion Open-loop dynamics motion for")
Control-Law Partitioning • Controller Design (example) 1) Model based portion Open-loop dynamics motion for a unit mass 2) Servo portion closed-loop dynamics critical damping condition 24

Control-Law Partitioning • Block Diagram • Example 25

Trajectory-Following Control • 26

Disturbance Rejection • Disturbance rejection – Maintain good performance in the presence of external disturbances or noise • Steady-state error 27

Disturbance Rejection • Addition of integral term PID controller • Steady-state error 28
- Slides: 28