ENS Workshop John Ashburner johnfil ion ucl ac

ENS Workshop John Ashburner john@fil. ion. ucl. ac. uk Functional Imaging Lab, 12 Queen Square, London, UK.

Training and Classifying ? ? Patient Training Data Control Training Data ? ?
")
Classifying ? ? Patients Controls ? ? y=f(a. Tx+b)

Support Vector Classifier
 Support Vector a is a weighted linear combination of the")
Support Vector Classifier (SVC) Support Vector a is a weighted linear combination of the support vectors
 o")
Some Equations o Linear classification is by y = f(a. Tx + b) o where a is a weighting vector, x is the test data, b is an offset, and f(. ) is a thresholding operation o a is a linear combination of SVs a = Si wi xi o So y = f(Si wi xi. Tx + b)
) o")
Going Nonlinear o Nonlinear classification is by y = f(Si wi (xi, x)) o where (xi, x) is some function of xi and x. o e. g. RBF classification (xi, x) = exp(-||xi-x||2/(2 s 2)) o Requires a matrix of distance measures (metrics) between each pair of images.

Nonlinear SVC
 ≥ 0 o")
What is a Metric? o Positive A B o Dist(A, B) ≥ 0 o Dist(A, A) = 0 o Symmetric o Dist(A, B) = Dist(B, A) o Satisfy triangle inequality o Dist(A, B)+Dist(B, C) ≥ Dist(A, C) C

Concise representations o Information reduction/compression o Most parsimonious representation - best generalisation o Occam’s Razor ©Friston o Registration compresses data o signal is partitioned into o deformations o residuals

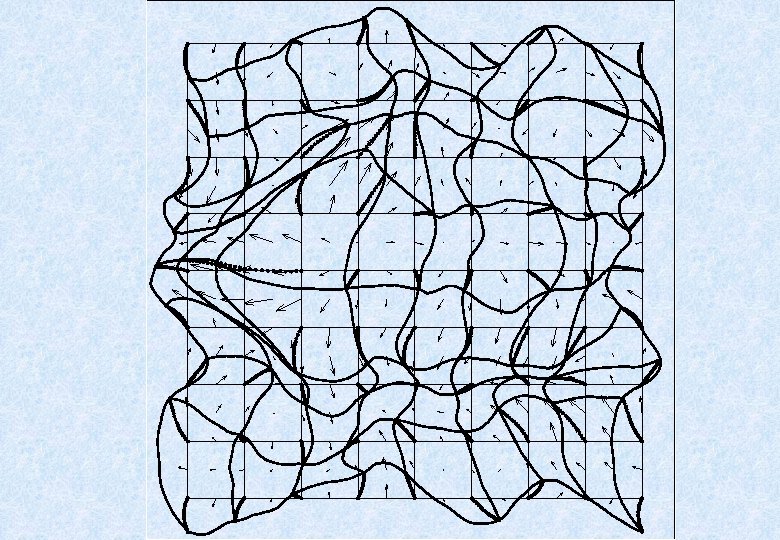
Nonlinear Registration

Mapping

How could DTI help?

Small Deformations
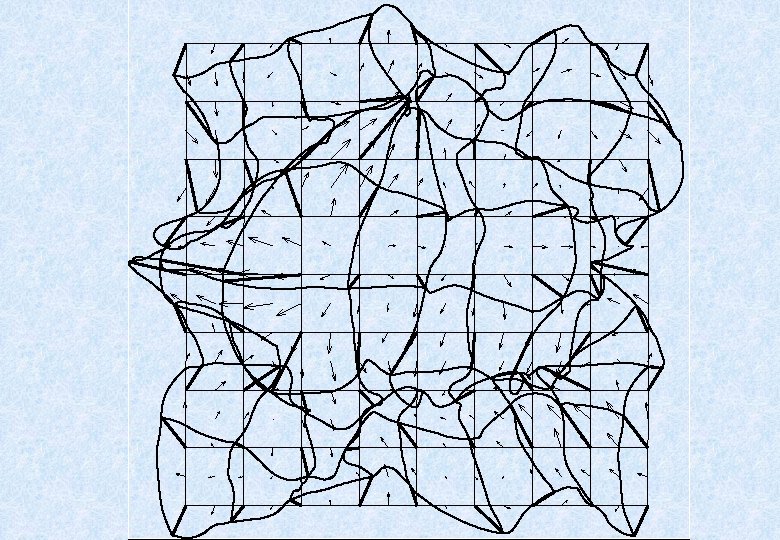

Diffeomorphisms
 =")
Partial Differential Equations Model one image as it deforms to match another. x(t) = V x(t) It’s a bit like DCM but with much bigger V matrices (about 10, 000 x 10, 000 – instead of about 4 x 4). x(t+1) = V e x(t)
 = x(0) -V x(0) = e x(1)")
Matrix representations of diffeomorphisms V e x(1) = x(0) -V x(0) = e x(1) For large k V e ≈ k (I+V/k)

Compositions Large deformations generated from compositions of small deformations S 1 = S 1/8 o. S 1/8 Recursive formulation S 1 = S 1/2 o. S 1/2, Small deformation approximation S 1/8 ≈ I + V/8 S 1/2 = S 1/4 o. S 1/4, S 1/4 = S 1/8 o. S 1/8

The shape metric o Don’t use the straight distance (i. e. o Distance = √v. TLTLv o What’s the best form of L? o Membrane Energy o Bending Energy o Linear Elastic Energy √ v. T v)

Consistent registration Register to a mean shaped image A B µ C Totally impractical for lots of scans C Problem: How can the distance between e. g. A and B be computed? Inverse exponentiating is iterative and slow.

Metrics from residuals o Measures of difference between tensors. o Relates to objective functions used for image registration. o Can the same principles be used?




Over-fitting Test data A simpler model can often do better. . .

Cross-validation o Methods must be able to generalise to new data o Various control parameters o More complexity -> better separation of training data o Less complexity -> better generalisation o Optimal control parameters determined by crossvalidation o Test with data not used for training o Use control parameters that work best for these data

Two-fold Cross-validation Use half the data for training. and the other half for testing.

Two-fold Cross-validation Then swap around the training and test data.

Leave One Out Cross-validation Use all data except one point for training. The one that was left out is used for testing.

Leave One Out Cross-validation Then leave another point out. And so on. . .

Interpretation? ? o Significance assessed from accuracy based on cross-validation. o Main problems: o No simple interpretation. o Mechanism of classification is difficult to visualise o especially for nonlinear classifiers o Difficult to understand (not like blobs) o May be able to use the separation to derive simple (and more publishable hypotheses).
 form a Group. o Closure o")
Group Theory o Diffeomorphisms (smooth continuous one-to-one mappings) form a Group. o Closure o Ao. B remains in the same group. o Associativity o (Ao. B)o. C = Ao(Bo. C) o Identity transform I exists. o Inverse o A-1 exists, and A-1 o. A=Ao. A-1 = I o It is a Lie Group. o The group of diffeomorphisms constitute a smooth manifold. o The operations are differentiable.

Lie Groups o Simple Lie Groups include various classes of affine transform matrices. o E. g. SO(2) : Special Orthogonal 2 D (rigid-body rotation in 2 D). o Manifold is a circle o Lie Algebra is exponentiated to give Lie group. For square matrices, this involves a matrix exponential.
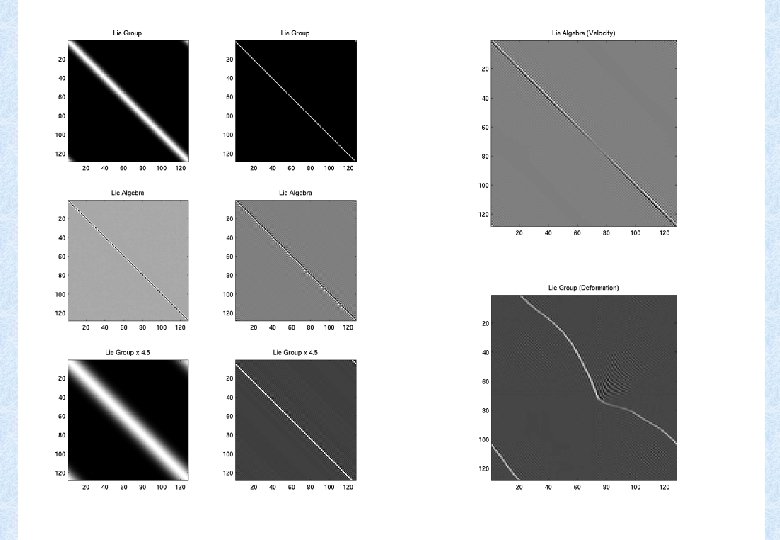

Relevance to Diffeomorphisms o Parameterise with velocities, rather than displacements. o Velocities are the Lie Algebra. These are exponentiated to a deformation by recursive application of tiny displacements, over a period of time=0. . 1. o A(1) = A(1/2) o A(1/2) = A(1/4) o Don’t actually use matrices. o For tiny deformations, things are almost linear. o x(1/1024) x(0) + vx/1024 o y(1/1024) y(0) + vy/1024 o z(1/1024) z(0) + vz/1024 o Recursive application by o x(1/2) = x(1/4) (x(1/4), y(1/4), z(1/4)) o y(1/2) = y(1/4) (x(1/4), y(1/4), z(1/4)) o z(1/2) = z(1/4) (x(1/4), y(1/4), z(1/4))

Working with Diffeomorphisms o Averaging Warps. o Distances on the manifold are given by geodesics. o Average of a number of deformations is a point on the manifold with the shortest sum of squared geodesic distances. o E. g. average position of London, Sydney and Honolulu. o Inversion. o Negate the velocities, and exponentiate. o x(1/1024) x(0) - vx/1024 o y(1/1024) y(0) - vy/1024 o z(1/1024) z(0) - vz/1024 o Priors for registration o Based on smoothness of the velocities. o Velocities relate to distances from origin.
- Slides: 38