VISION DFINITION LA VISION PAR ORDINATEUR OU VISION


 QUI REPRÉSENTENT CHACUN UNE PORTION")
 N&B Le mode monochrome, ou plus généralement le")





; Avoir valeur des canaux pixels : // peut")


- Slides: 16
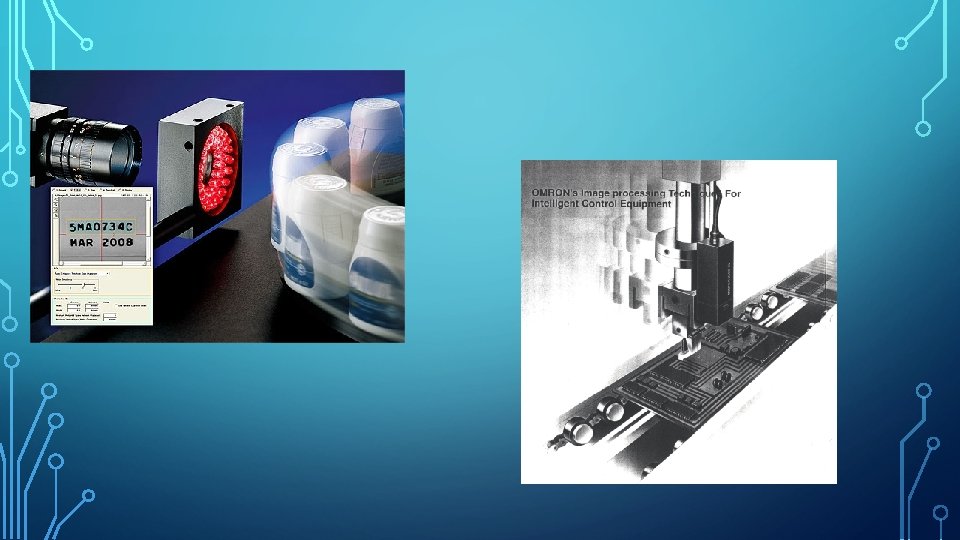
VISION DÉFINITION LA VISION PAR ORDINATEUR OU VISION ARTIFICIELLE EST LE TRAITEMENT D’IMAGES PAR ORDINATEUR PROVENANT D’UN DISPOSITIF EXTÉRIEUR TEL QUE : CAMÉRA, MICROSCOPE, SONDE SPATIALE… ELLE EST UN MOYEN PUISSANT D’EXPLORER NOTRE ENVIRONNEMENT. L’UNE DES PRINCIPALES RAISONS DE CE DÉVELOPPEMENT EST LA MISE AU POINT DE CAPTEURS DE HAUTE QUALITÉ POUR LES BESOINS DE L’INDUSTRIE DE LA TÉLÉVISION. LES CAMÉRAS SONT DISPONIBLES À DES COÛTS ACCEPTABLES ET LES CAPTEURS DÉVELOPPÉS POUR CE MARCHÉ SONT RÉSISTANTS ET FIABLES.
DOMAINE D’APPLICATION • • Le domaine d’application de la vision artificielle se divise en plusieurs branches distinctes dont les principales sont : la saisie ou l’acquisition de l’image, sa digitalisation et ses traitements en 2 D; l’automatisation et la robotique (assemblage de pièces mécaniques, composantes électroniques, soudure, contrôle de la qualité); la géomatique, l’imagerie aérienne (Drône) et spatiale (satellites, ressources naturelles, cartographie, météorologie…), l’information provenant de la technologie biomédicale (scanner, échographie, résonance magnétique et reconnaissance de cellules…); La biométrie (Reconnaissance des parties d’un visage) la vision tridimensionnelle, la modélisation des objets et de l’espace en trois dimensions, caméra 3 D; le traitement des images couleur; la CAO, l’infographie et la synthèse d’images. Quelques exemples concrets : • • Reconnaissance d’écriture (OCR) Contrôle visuel sur une chaine de fabrication Asservissement visuel de robots, une caméra observe l’évolution du robot dans l’espace et le renseigne sur sa position par rapport à la cible Guidance-tracking Robotique mobile Évitement d’obstacles Exploration Conduite automobile automatique ou assistée
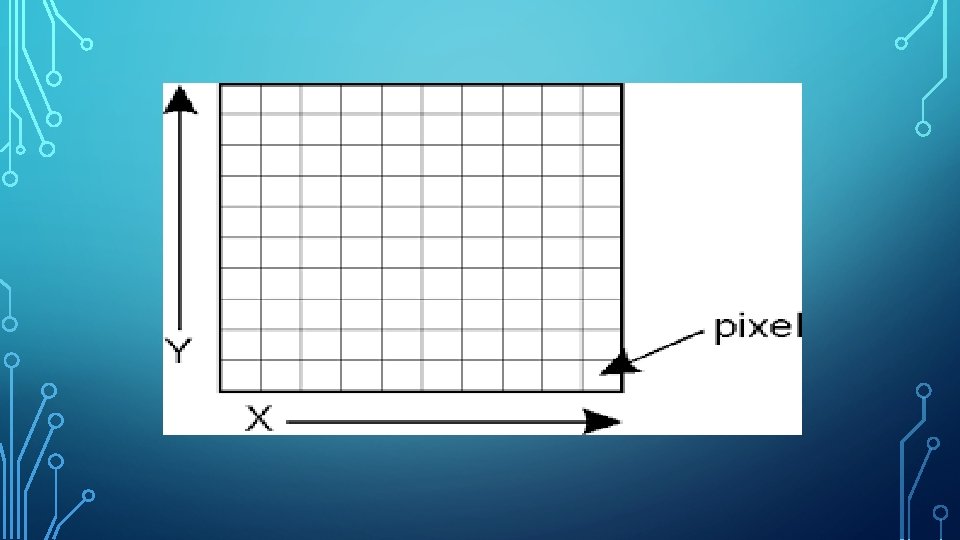
UNE IMAGE NUMÉRIQUE EST COMPOSÉE D’UNITÉS ÉLÉMENTAIRES (APPELÉES PIXELS) QUI REPRÉSENTENT CHACUN UNE PORTION DE L’IMAGE. UNE IMAGE EST DÉFINIE PAR : LE NOMBRE DE PIXELS QUI LA COMPOSE EN LARGEUR ET EN HAUTEUR L’ÉTENDUE DES TEINTES DE GRIS OU DES COULEURS QUE PEUT PRENDRE CHAQUE PIXEL
Le mode monochrome (un seul bit) N&B Le mode monochrome, ou plus généralement le mode noir et blanc, est stocké sur un seul bit. Un octet peut donc stocker jusqu'à huit pixels. C'est le mode qui prend le moins de place sur le disque dur et il est recommandé pour le stockage de documents manuscrits numérisés • Le mode 16 couleurs (sur 4 bits) Le mode 16 couleurs, ou 16 niveaux de gris, est stocké sur 4 bits. Un octet peut donc stocker jusqu'à deux pixels. Ce mode prend peu de place sur disque dur, mais la qualité visuelle, des images, est en général insuffisante à cause du faible nombre de couleurs Le mode 256 couleurs (sur 8 bits) Le mode 256 couleurs, ou 256 niveaux de gris, est stocké sur 8 bits. Un octet peut donc stocker un seul pixel. Ce mode est utilisé par les formats GIF et PNG par exemple. Il offre un bon compromis entre place pour le stockage et qualité visuelle
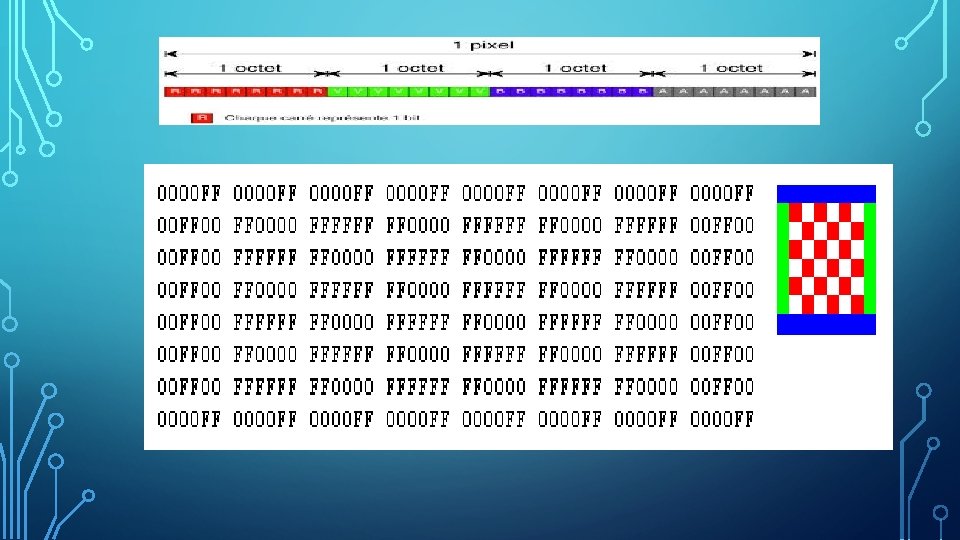
• Le mode couleurs RVB Ce mode permet de représenter un pixel par ses trois composantes RVB (Rouges, Vertes et Bleues). Si chaque composante est stockée sur un octet (8 bits), un pixel est donc stocké sur trois octets (24 bits). Ce mode est capable de gérer jusqu'à 16 millions de couleurs et offre une très bonne qualité visuelle. Il est utilisé par les formats JPEG et PNG par exemple. • le nombre de couleurs possible est : 256 * 256 = 16 777 216 • Le mode RVBA est un mode RVB auquel on rajoute une couche Alpha. Par conséquent, un pixel est stocké sur quatre octets (32 bits). Ce mode est utilisé en cas de transparence par couche Alpha • Canal Rouge : R = 256 valeurs Canal Vert : V = 256 valeurs Canal Bleu: B = 256 valeurs Canal Alpha = 256 valeurs • 256 x 256 = 4 294 967 296
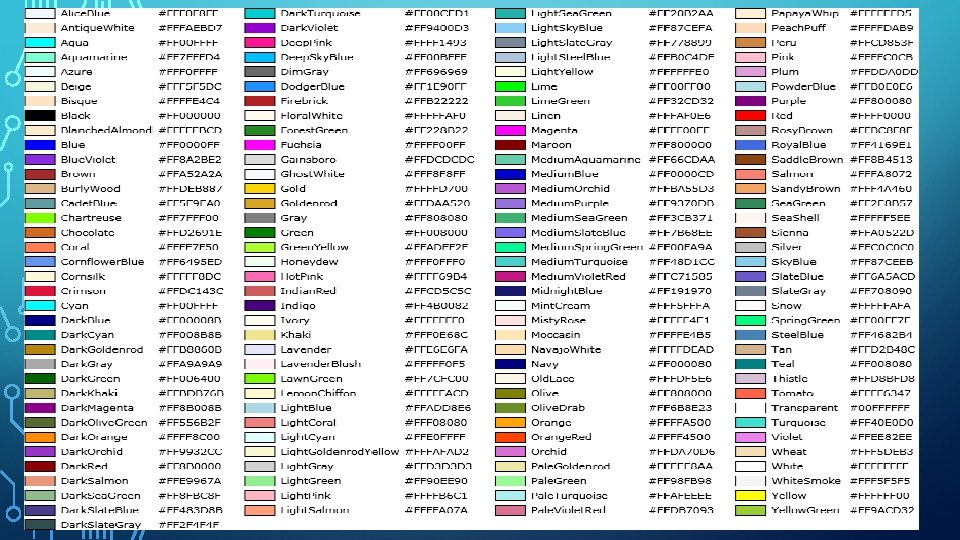
EXEMPLE NUMÉRIQUE DE COULEURS D’UNE IMAGE : R 0 0 255 0 0 128 255 V 0 0 0 255 0 128 255 B 0 1 0 0 255 128 255 Couleur noir nuance de noir rouge vert bleu gris blanc
BLEU EST EN HEXADÉCIMAL : # FF 0000 FF CE QUI CORRESPOND EN BINAIRE : 1111 00000000 1111
La transparence ou translucidité La transparence est une propriété qui permet de définir l'opacité d'une image, c'est-à-dire la possibilité de voir à travers l'image et de laisser apparaître des éléments situés en dessous (un fond ou un autre objet graphique). En cas d'image transparente, l'arrière-plan est symbolisé par un damier. Photo. Filtre est capable de gérer deux modes de transparence
cv: : Mat image = PROGRAMMATION C++ : cv: : Mat image = cv: : imread(". . /Image. Bruite 2. jpg"); Ou sur la caméra : Video. Capture cam(0); while (cam. is. Opened()) Mat src; cam. read(src);
src 1 = imread("lena. jpg", CV_LOAD_IMAGE_COLOR); Avoir valeur des canaux pixels : // peut être emmagasiner dans un int ou uchar Scalar intensity 2 = img. at<uchar>(Point(x, y)); Vec 3 b intensity 2 = src 1. at<Vec 3 b>(y, x); uchar blue = intensity 2. val[0]; uchar green = intensity 2. val[1]; uchar red = intensity 2. val[2]; Modifier les pixels : for (int i=100; i<src 1. rows; i++) { for (int j=100; j<src 1. cols; j++) { src 1. at<Vec 3 b>(i, j)[0] = 0; src 1. at<Vec 3 b>(i, j)[1] = 200; src 1. at<Vec 3 b>(i, j)[2] = 0; } }
DOCUMENTATION EN LIGNE • https: //docs. opencv. org/3. 4. 5/d 98/tutorial_mat_operations. html
TUTORIEL OPENCV : HTTPS: //DOCS. OPENCV. ORG/3. 4. 5/D 9/DF 8/TUTO RIAL_ROOT. HTML HTTPS: //DOCS. OPENCV. ORG/3. 4. 5/DE/D 7 A/TUTO RIAL_TABLE_OF_CONTENT_CORE. HTML