TARGET HANDOFF MULTISENSORMULTITARGET 2014 2015 UPDATE THEODORE TEATES










 •")
 •")




")




- Slides: 25
TARGET HANDOFF MULTI-SENSOR/MULTI-TARGET 2014 -2015 UPDATE THEODORE TEATES &DR. CHUNG HAO CHEN OLD DOMINION UNIVERSITY DEPARTMENT OF ELECTRICAL AND COMPUTER ENGINEERING
Introduction • Transition between Julie Hoven and Theodore Teates • Rotation Matrix conversion to Quaternions • 4. 2. Problem Formulation using Euler Angles • 4. 3. Problem Formulation using Quaternions • Verification through simulation • 6. 2. 4. 1. Euler Angles • 6. 2. 4. 2. Quaternions • Error analysis • 5. 1. FOV Error • 5. 2. Resolution Error • 5. 2. 1. Sensor Characteristics (i. e. Focal Length, Image Format, Principal Point…) • 5. 2. 2. Sensor Heading • 5. 3. Gimbal Concerns • 5. 3. 1. Gimbal Movement and Minimum Resolution for Accurate Tracking • 5. 3. 2. Minimizing Gimbal Rotation • 5. 3. 3. Counter Detection • 5. 4. Euler Error • 5. 5. Quaternion Error • 5. 6. Error Propagation
Rotation-Trackability Measure
Euler Rotation Process n Original target point n New target point n Final target point n Rotation Matrix
n Rotation Matrix n Inverse Rotation Matrix
Gimbal Panning/Tilting • Euler angles are not sufficient although directly correlate to sensor position • Gimbal lock proven to jam electronics • Quaternions Required to eliminate possibility of gimbal lock
Quaternion Rotation Process Euler Quaternions n Original target point n New target point n Final target point n Point conversion
Quaternion Rotation Conversion
Error Analysis • 5. 1. FOV Error • 5. 2. Resolution Error • 5. 2. 1. Sensor Characteristics (i. e. Focal Length, Image Format, Principal Point…) • 5. 2. 2. Sensor Heading • 5. 3. Gimbal Concerns • 5. 3. 1. Gimbal Movement and Minimum Resolution for Accurate Tracking • 5. 3. 2. Minimizing Gimbal Rotation • 5. 3. 3. Counter Detection • 5. 4. Euler Error • 5. 5. Quaternion Error • 5. 6. Error Propagation
Error Created by Polygonal Approximations
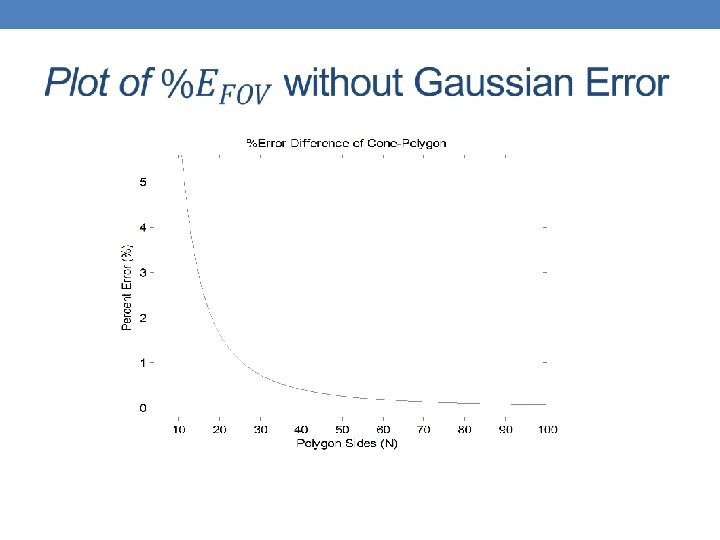
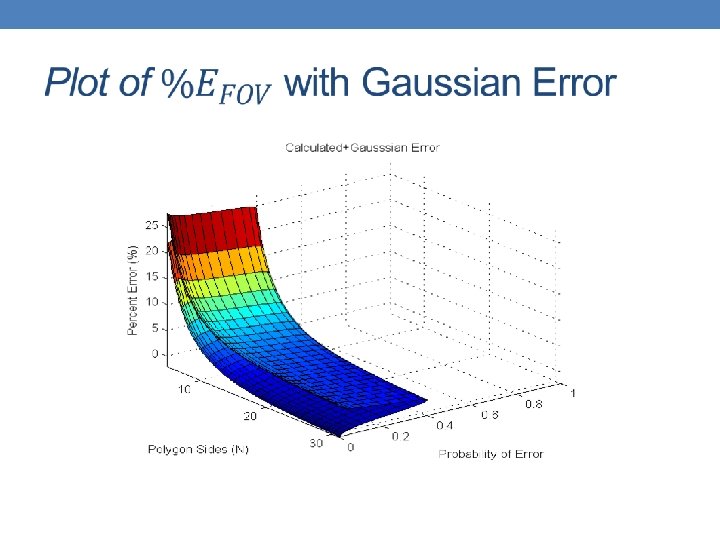
FOV Error (polygonal-circular diff. ) •
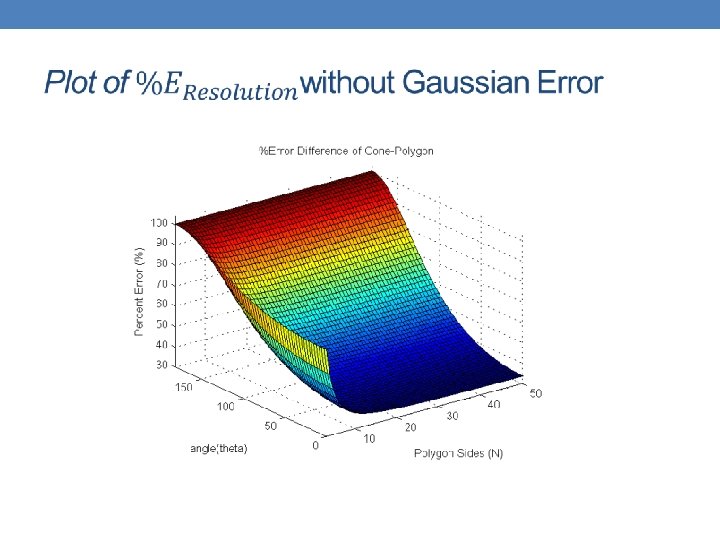
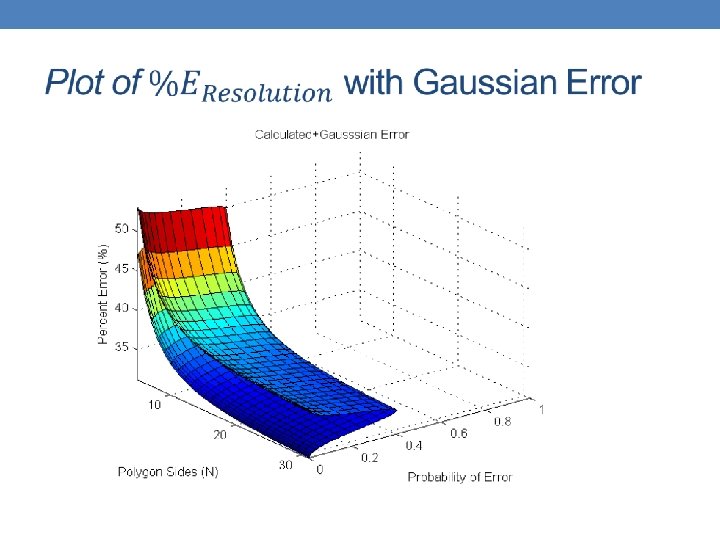
Resolution Error (polygonal-circular diff. ) •
Resolution Concerns • 5. 2. 1. Sensor Characteristics (i. e. Focal Length, Image Format, Principal Point…) • Covered by system error or manufacturing standard • 5. 2. 2. Sensor Heading • Relative velocity between target and platform sensor. • Covered by platforms ability to monitor own position, system error and target position error.
Euler Error
Quaternion Error
Error Propagation
Error Propagation (example)
Gimbal Concerns • 5. 3. 1. Gimbal Movement and Minimum Resolution for Accurate Tracking
Gimbal Concerns • 5. 3. 1. Gimbal Movement and Minimum Resolution for Accurate Tracking
Gimbal Concerns • 5. 3. 2. Minimizing Gimbal Rotation • prolong the life of the equipment • lower power consumption • Use the current FOV structure and move the gimbal when approaching the inner gimbal cone • This would maintain a target moving at a reasonable velocity and distance but would require the gimbal to constantly move if the gimbal only moved • Gimbal control programed to continue moving the gimbal on a FOV gimbal trigger until the target is in the center of the FOV • allow for the possibility of an instantaneous target trajectory change • require less gimbal movement than only panning during a trigger event. • Gimbal control programed to continue moving the gimbal on a FOV gimbal trigger until the target is at a point on the far side of the FOV corresponding to the trending average velocity of the target • run into trouble if the target changes trajectory in the opposite direction unexpectedly • 5. 3. 3. Counter Detection • Target trending
Questions? • Dr. Chung-Hao Chen cxchen@odu. edu 757 -683 -3475 • Theodore Teates tteat 001@odu. edu