Mouvement et interactions MI 11 Dcrire un mouvement





 Vecteur position Le vecteur position est le vecteur repérant la position d'un point")
 Vecteur vitesse. Dans un référentiel donné, le vecteur vitesse du point M à")


 s’exprime :")
 Le vecteur accélération Lors d'un mouvement, le vecteur vitesse varie en norme ou")


 Mouvements rectilignes. La trajectoire d’un mouvement rectiligne")


, celle-ci a pour expression : x (t)=a/2⋅t v 0⋅t+x")

- Slides: 20
Mouvement et interactions
MI 11 Décrire un mouvement
I. Référentiel et nature du mouvement. A la question "Quel est le mouvement du passager B? ", il est possible d'apporter plusieurs réponses. Par exemple: Le passager B est immobile par rapport au bus. Le passager B se déplace suivant une droite par rapport au trottoir. La notion de mouvement est donc relative à l'objet par rapport auquel on l'étudie.
Référentiel d'étude Le référentiel d'étude est le solide de référence choisi par l'expérimentateur à partir duquel le mouvement d'un objet est décrit. Pour étudier le mouvement dans le référentiel d'étude, on y associe : • Un repère d'espace orthonormé dont l'origine O est fixée géométriquement dans le référentiel d'étude. • Un repère de temps dont l'origine est définie par le temps t=0.
II. Position, vitesse et accélération Faire l'étude du mouvement d'un point mobile consiste à recher deux types d'informations: Øune information sur la trajectoire du point mobile. Øune information sur la rapidité avec laquelle cette trajectoire est parcourue. C'est ce qu'on appelle la vitesse.
A) Vecteur position Le vecteur position est le vecteur repérant la position d'un point mobile M le long d'une trajectoire à un instant t par rapport à l'origine O d'un repère associé à un référentiel d'étude : x(t) : abscisse du point M y(t) : ordonnée du point M z(t) : altitude du point M
B) Vecteur vitesse. Dans un référentiel donné, le vecteur vitesse du point M à la date t est égal à la dérivée par rapport au temps du vecteur position ����(�� ) à cette date:
Coordonnées cartésiennes du vecteur vitesse:
Mouvement circulaire On dit qu’un solide a un mouvement circulaire, dans un référentiel donné, si sa trajectoire est un cercle. Pour simplifier l’étude d’un tel mouvement et en déduire les caractéristiques, il faut utiliser le repère de Frenet : - T Désigne un vecteur unitaire tangent à la trajectoire et orienté dans le sens du mouvement. - N Désigne un vecteur unitaire perpendiculaire à et orienté vers le centre O du cercle.
Dans le repère de Frenet, le vecteur vitesse v(t) s’exprime :
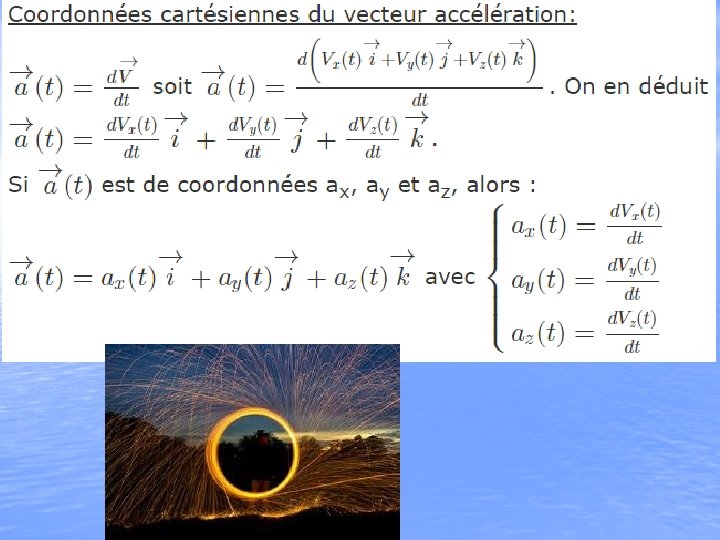
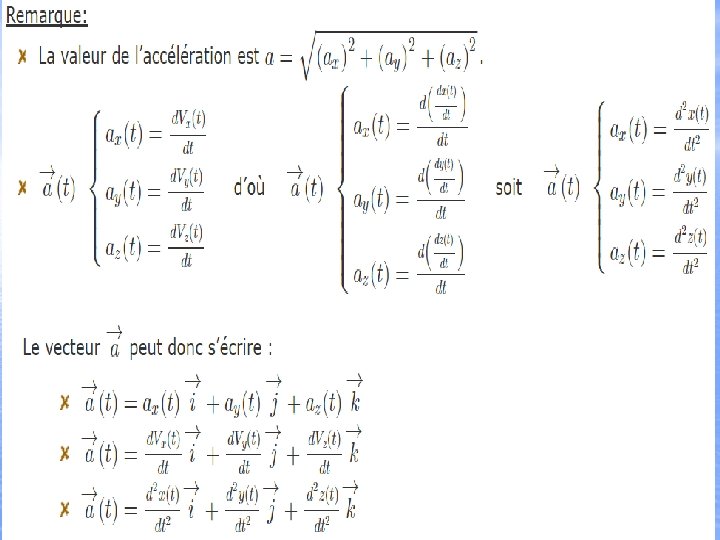
C) Le vecteur accélération Lors d'un mouvement, le vecteur vitesse varie en norme ou en direction créant ainsi un vecteur accélération. Le vecteur accélération a. M(t) d'un point mobile M à l'instant t est la dérivée temporelle du vecteur vitesse : Le vecteur accélération est caractérisé par : • Sa valeur a (en m. s− 2) • Sa direction, définie par la variation de direction du vecteur vitesse • Son sens, défini par la variation de norme du vecteur vitesse
Le vecteur accélération peut se décomposer de la façon suivante : R est le rayon de la trajectoire circulaire. En conséquence, le vecteur accélération peut être décomposé en une : Accélération tangentielle qui dépend de la variation de la valeur de la vitesse. Accélération normale qui est liée à la variation de la direction du vecteur vitesse. Dans le cas d’un mouvement circulaire uniforme : L’acc é radia lération es le Elle e et centri t p s centr t dirigée v ète. e de la tra ers le jecto ire
Vecteur vitesse dans le repère de Frenet Vecteur accélération dans le repère de Frenet
III. Études de quelques cas courants. a) Mouvements rectilignes. La trajectoire d’un mouvement rectiligne est une droite. En conséquence, le repère (O, i, j, k) se réduit au seul axe (Ox) de vecteur unitaire i pour un mouvement horizontal. Les descripteurs du mouvement sont donc réduits à leur seule composante suivant l’axe (Ox) :
Mouvement rectiligne uniforme Un mouvement rectiligne est dit uniforme si et seulement si v est constant au cours du temps (v=cste) Ainsi Pour les mouvements rectilignes, la coordonnée x(t) a quant à elle pour forme : x(t)=v⋅t+x 0 : coordonnée initiale du système (m) Cette équation peut être déduite à partir de la recherche d’une primitive de v(t).
Mouvement rectiligne uniformément accéléré Un mouvement rectiligne est dit uniformément accéléré si et seulement si a(t) est constant au cours du temps : a(t)=ax⋅i Cette accélération constante implique la vitesse vx(t) s’exprime : vx(t)=a⋅t+v 0 : vitesse initiale du système (m. s-1)
Quant à la coordonnée x(t), celle-ci a pour expression : x (t)=a/2⋅t v 0⋅t+x 0 2+ v 0 : vitesse initiale du système (m. s-1) x 0 : coordonnée initiale du système (m) Les deux équations horaires précédentes peuvent être déterminées par la recherche de primitives en identifiant les constantes d’intégration à l’aide des conditions initiales du mouvement.
FIN MI 11 seconde