Application DeviceClient Android Application X Y HostServer Windows

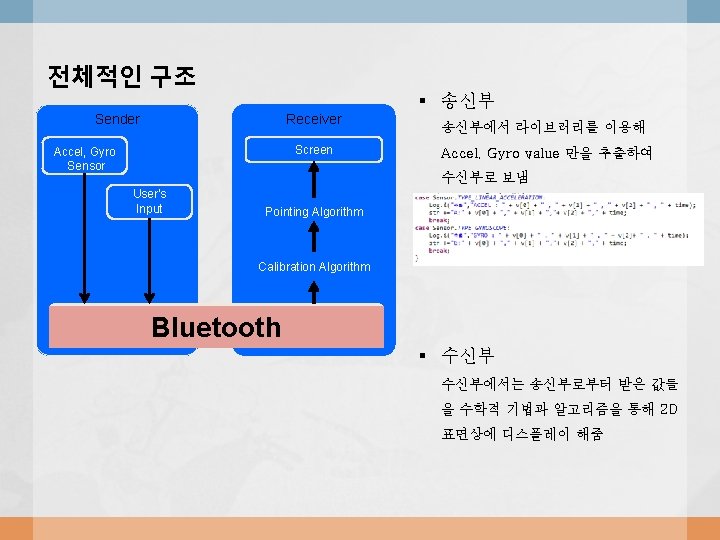
 Android Application X, Y Host(Server) Windows Application Or Button Click < 블루투스")
 Android Application Host(Server) Windows Application X, Y Or Button Click <byte type>")
![values Android. Hardware. Sensor. TYPE_ACCELEROMETER (단위 : m/s²) Values[0] = Acceleration minus Gx on](https://slidetodoc.com/presentation_image_h/b5092f71b82050d6e194f6858f36b711/image-6.jpg "values Android. Hardware. Sensor. TYPE_ACCELEROMETER (단위 : m/s²) Values[0] = Acceleration minus Gx on")
 linear_accelvalue : 가속도 x, y")


")





 Collaboration. Interaction Design Lab. , Department of")


- Slides: 36
Application Device(Client) Android Application X, Y Host(Server) Windows Application Or Button Click < 블루투스 통신 환경 기반의 송수신부 개발환경 > < 블루투스 소켓 통신 알고리즘 >
Application Device(Client) Android Application Host(Server) Windows Application X, Y Or Button Click <byte type> (X_value , Y_value) bluetooth <byte type> (X_value , Y_value)
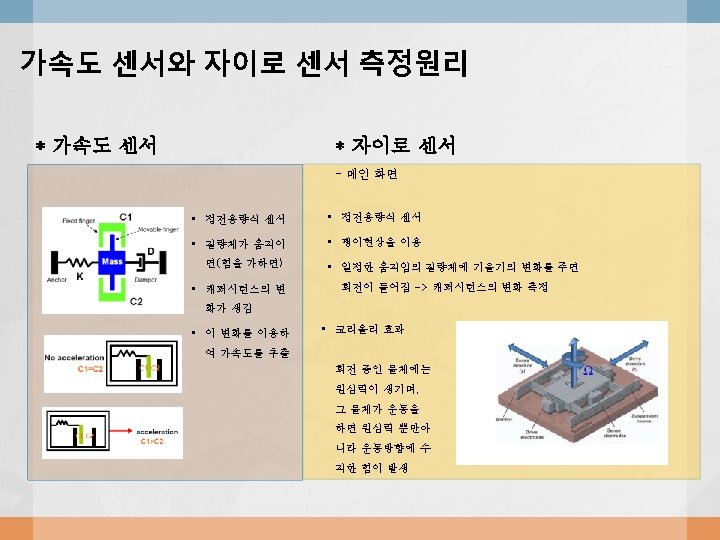
values Android. Hardware. Sensor. TYPE_ACCELEROMETER (단위 : m/s²) Values[0] = Acceleration minus Gx on the x-axis Values[1] = Acceleration minus Gy on the y-axis Values[2] = Acceleration minus Gz on the z-axis Android. Hardware. Sensor. TYPE_GYROSCOPE (단위 : radians / s) Values[0] = Angular speed around the x-axis Values[1] = Angular speed around the y-axis Values[2] = Angular speed around the z-axis 센서의 변화 event Accel_v [0. . 2] Gyro_v[0. . 2] 스마트폰의 좌표계
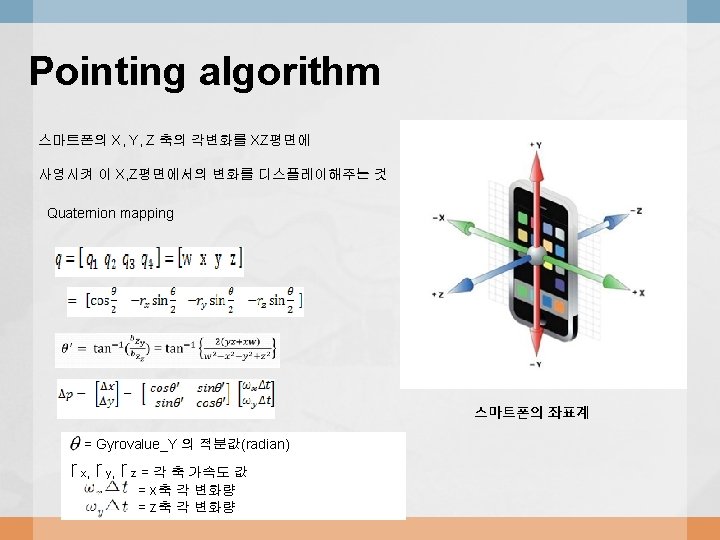
Pointing algorithm Rodrigues mapping = Gyrovalue_Y 의 적분값 (radian) linear_accelvalue : 가속도 x, y 입력값(m/s²) = x축 각 변화량 = z축 각 변화량 스마트폰의 좌표계
적용 알고리즘 – 1 Gyro data using the integral value – Gyroscope data 만을 사용 – Pointer position = s·θ θ = 자이로 센서의 roll, pitch, yaw 각속도의 적분 값 s = 스케일링 계수(Scaling factor) Making float data for Received String data Pointing algorithm Part
적용 알고리즘 – 2 Quaternion Mapping
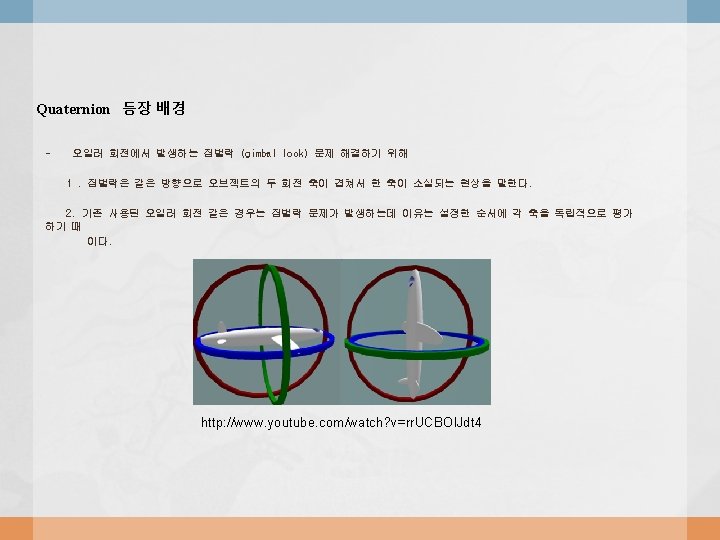
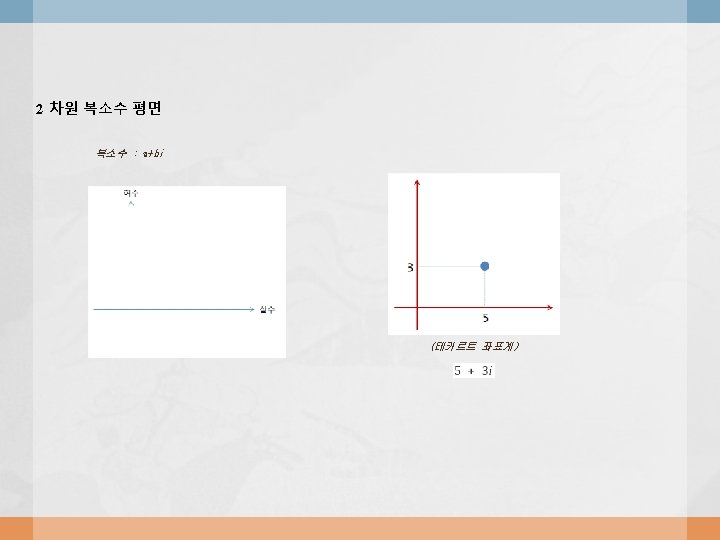
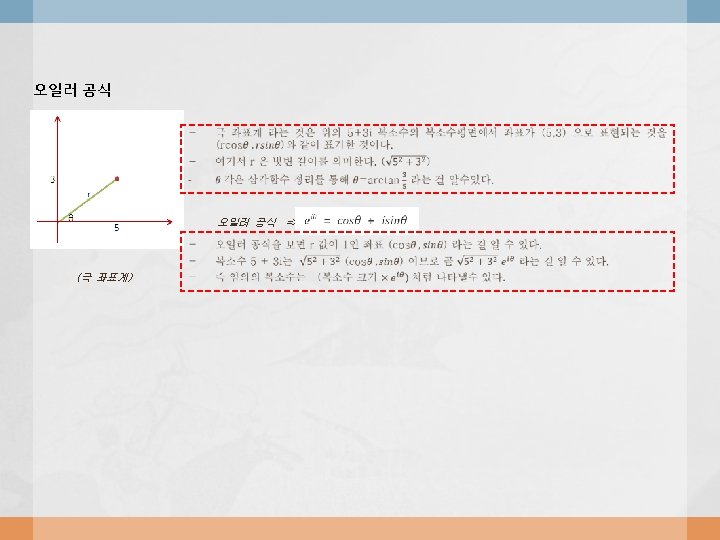
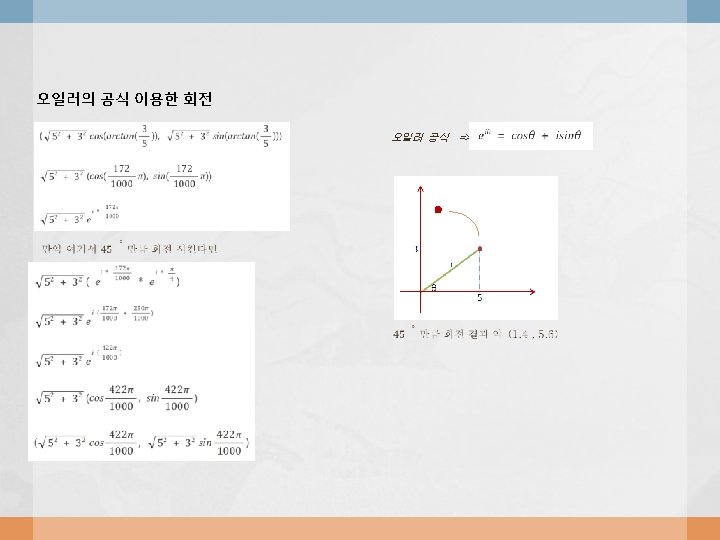
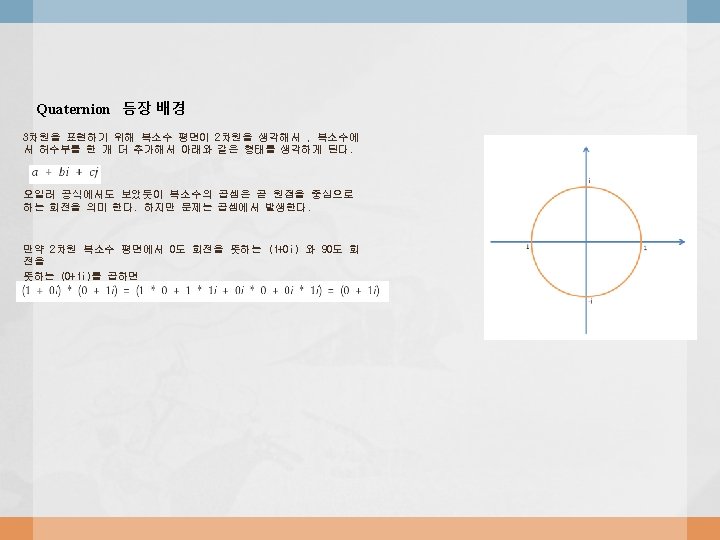
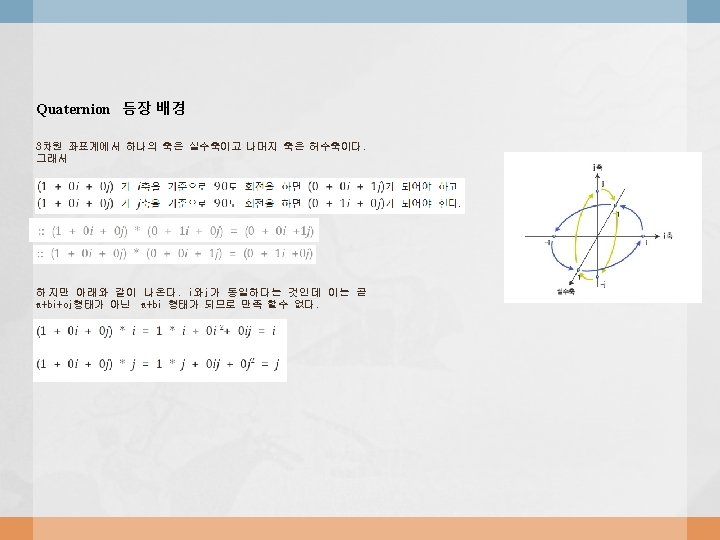
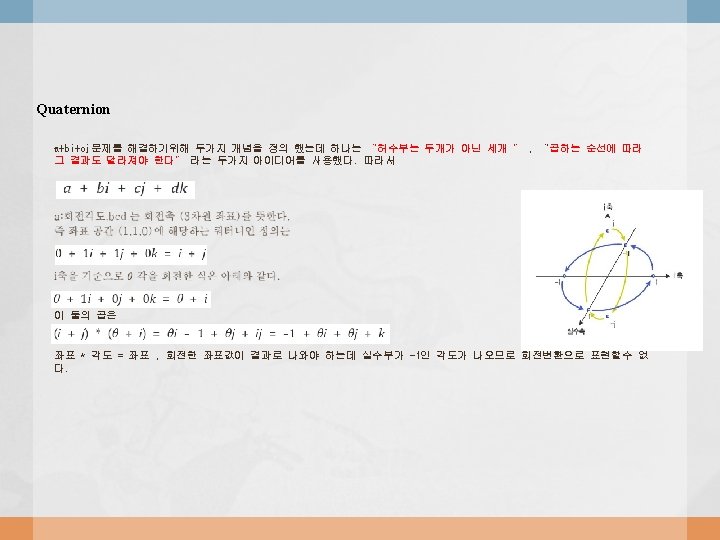
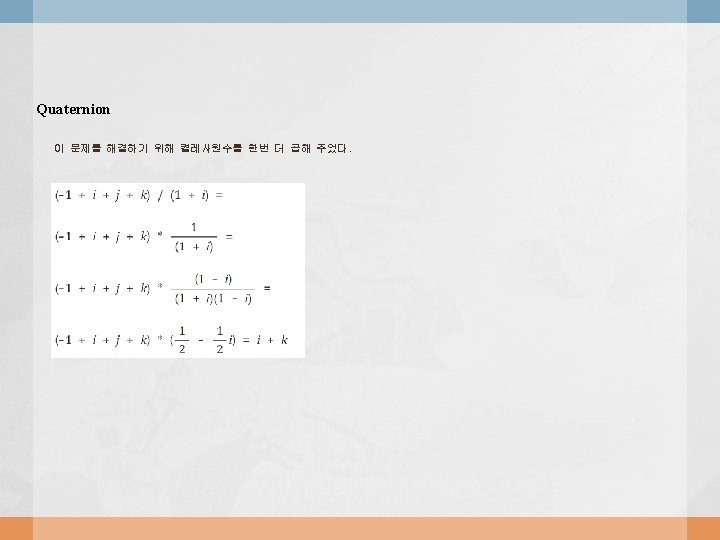
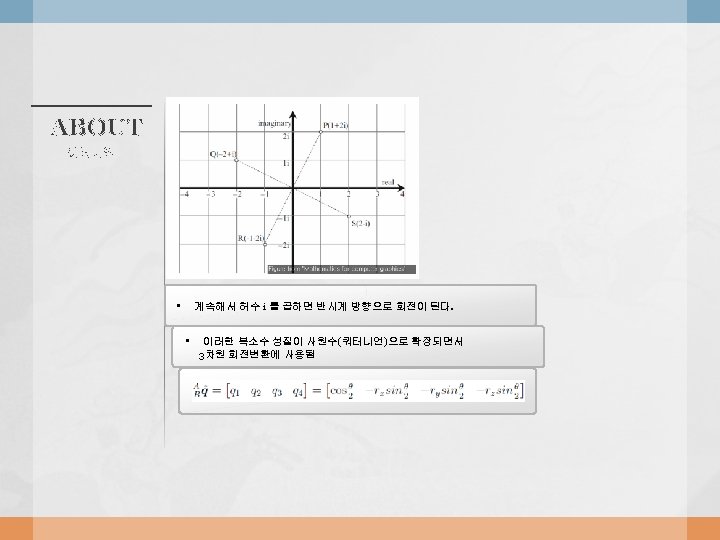
쿼터니언 (Quaternion)
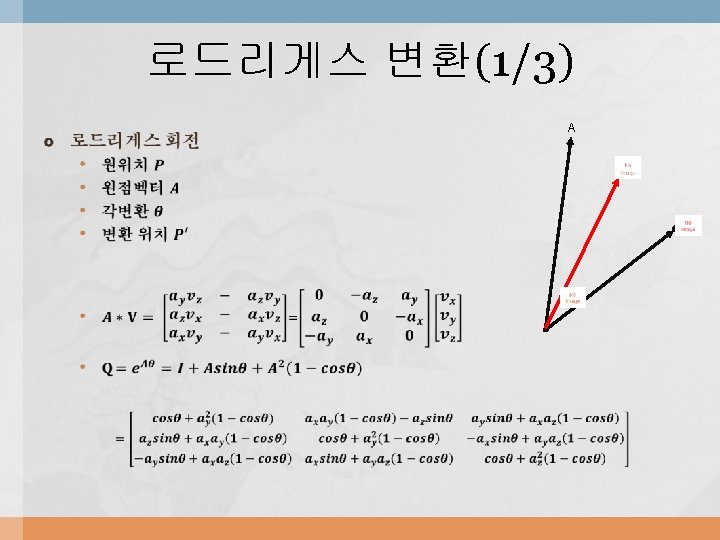
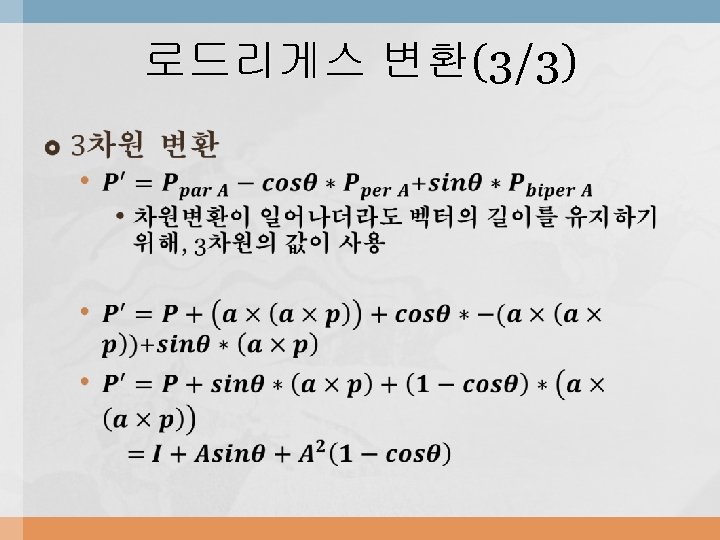
적용 알고리즘 – 3 Rodrigues Mapping Rodrigues’ rotation Mapping
Rodrigues’ rotation formula
벡터 및 삼각함수 Ø 벡터 Ø 삼각함수 a = c ∙ cosθ b = c ∙ sinθ Collaboration. Interaction Design Lab. , Department of Industrial Engineering
Rodrigues’ rotation formula rotates v Rodrigues’ rotation formula: 3차원에서 단위벡터를 축으로 회전시키는 변환하는 행렬 Unit vector k = (kx, ky, kz) Vector v = (vx, vy, vz) Vrot = Vx rot + Vz Collaboration. Interaction Design Lab. , Department of Industrial Engineering
Rodrigues’ rotation formula rotates v 위 두 식을 통해 c와 b는 같은 방향이기 때문에 Vz = (K∙V)K Collaboration. Interaction Design Lab. , Department of Industrial Engineering
Rodrigues’ rotation formula rotates v (x, y) Collaboration. Interaction Design Lab. , Department of Industrial Engineering
Rodrigues’ rotation formula rotates v Vrot = Vx rot + Vz Collaboration. Interaction Design Lab. , Department of Industrial Engineering
Rodrigues’ rotation formula rotates v Collaboration. Interaction Design Lab. , Department of Industrial Engineering