Advanced Topics In Computer Vision Spring 2016 Presented

![Video Representation [Peng, X. , et al. 2014], [Jan van Gemert, Uv. A]](https://slidetodoc.com/presentation_image_h/26a37bdc94f3e09cfbca3167679c2928/image-2.jpg "Video Representation [Peng, X. , et al. 2014], [Jan van Gemert, Uv. A]")
![• HOG (Histogram of Oriented Gradients) [Dalal and Triggs, 2005]](https://slidetodoc.com/presentation_image_h/26a37bdc94f3e09cfbca3167679c2928/image-3.jpg "• HOG (Histogram of Oriented Gradients) [Dalal and Triggs, 2005]")
 • Optical Flow and Histogram of Optical")
 • Optical Flow and HOF • Trajectories")
 • Optical Flow and HOF • Trajectories")
 • Optical Flow and HOF • Trajectories")


![Trajectories: normalized displacement vectors [Wang et. al. IJCV’ 13]](https://slidetodoc.com/presentation_image_h/26a37bdc94f3e09cfbca3167679c2928/image-10.jpg "Trajectories: normalized displacement vectors [Wang et. al. IJCV’ 13]")
 and optical flow (red)")

 and foreground ones (green)")
![• Part-based Human detector [Prest et al. 2012]](https://slidetodoc.com/presentation_image_h/26a37bdc94f3e09cfbca3167679c2928/image-14.jpg "• Part-based Human detector [Prest et al. 2012]")













- Slides: 40
Advanced Topics In Computer Vision, Spring 2016 Presented by: Sima Sabah
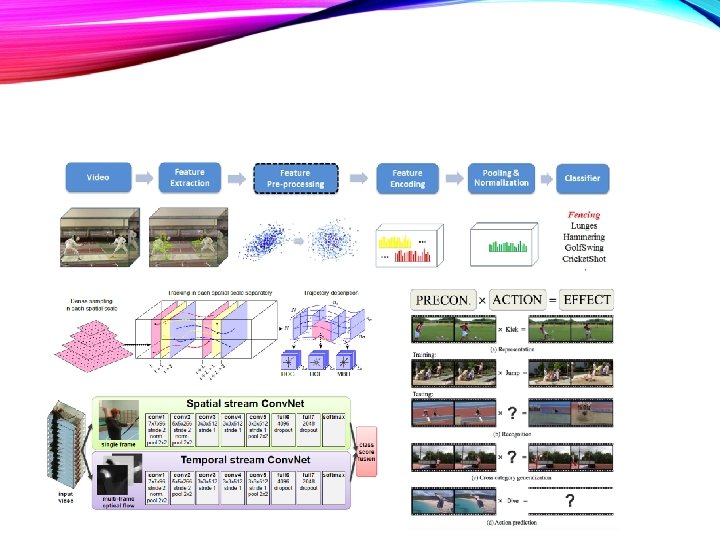
Video Representation [Peng, X. , et al. 2014], [Jan van Gemert, Uv. A]
• HOG (Histogram of Oriented Gradients) [Dalal and Triggs, 2005]
• HOG (Histogram of Oriented Gradients) • Optical Flow and Histogram of Optical Flow (HOF) [Laptev et al. 2008]
• HOG (Histogram of Oriented Gradients) • Optical Flow and HOF • Trajectories
• HOG (Histogram of Oriented Gradients) • Optical Flow and HOF • Trajectories • MBH (Motion Boundary Histogram) [Dalal et al. ECCV 2006]
• HOG (Histogram of Oriented Gradients) • Optical Flow and HOF • Trajectories • MBH (Motion Boundary Histogram)
• Neural Networks
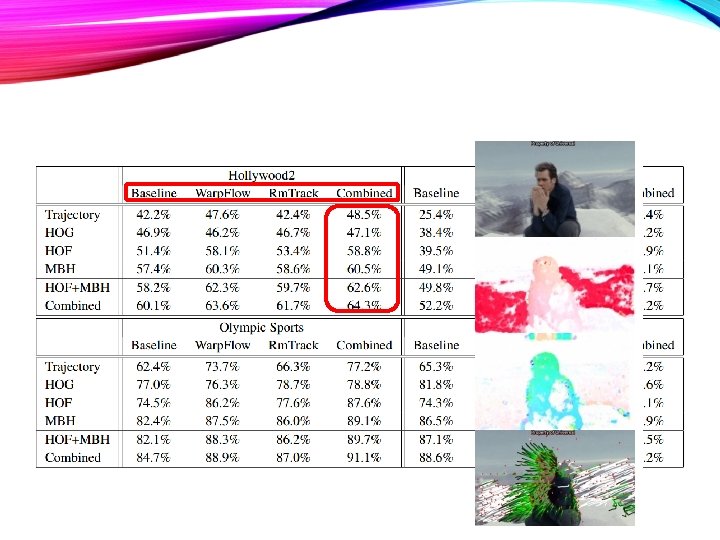
Hang Wang, Cordelia Shmid ICCV 2013
Trajectories: normalized displacement vectors [Wang et. al. IJCV’ 13]
• SURF (green) and optical flow (red)
Original optical flow
Successful examples Failure cases Removed trajectories (white) and foreground ones (green)
• Part-based Human detector [Prest et al. 2012]
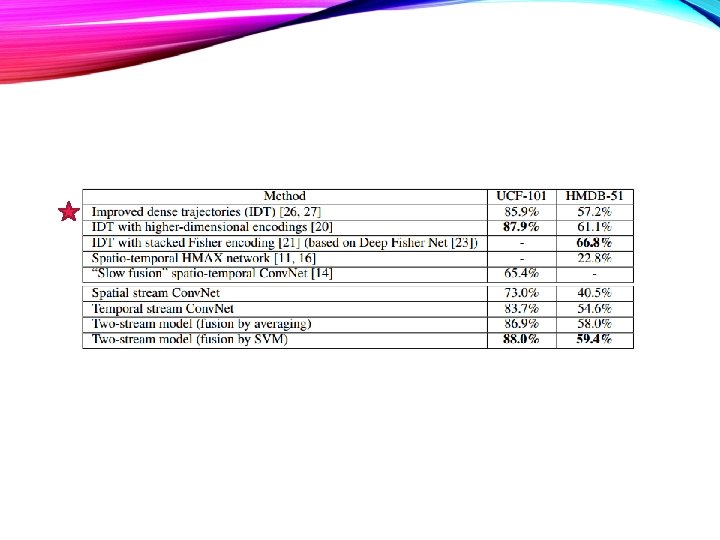
Karen Simonyan, Andrew Zisserman NIPS 2014
224 x 3 224 x 2 L
• Optical Flow Stacking • Trajectory Stacking
• HOF, MBH • Can be learned Single convolutional layer (containing orientation sensitive filters) followed by rectification and pooling layers • Trajectory • Can be an input using Trajectory stacking • Still missing: • Local pooling over spatio-temporal tubes centered at the trajectories • Camera motion compensation
• UCF-101 – optical flow representation • Two-Stream Conv. Net
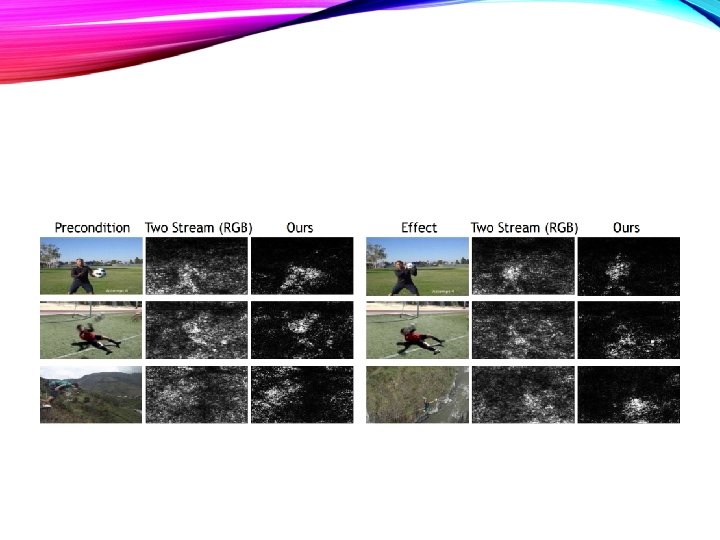
X. Wang, A. Farhadi, A. Gupta CVPR 2016
• Loss:
Spatial stream Conv. Net Temporal stream Conv. Net
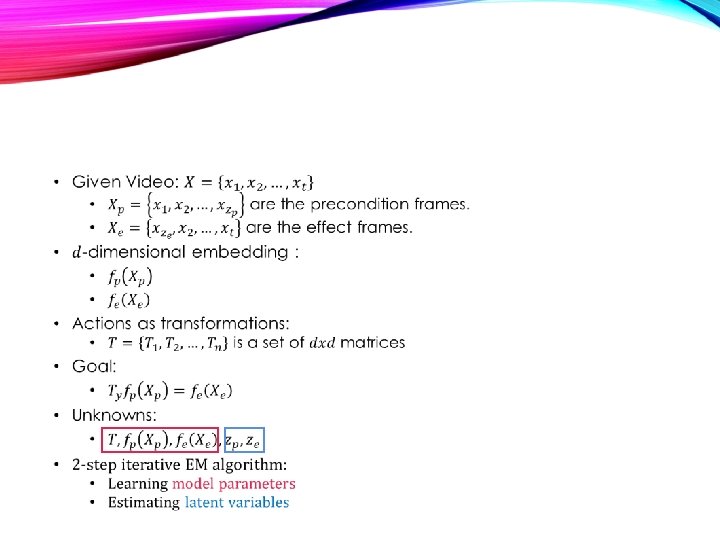
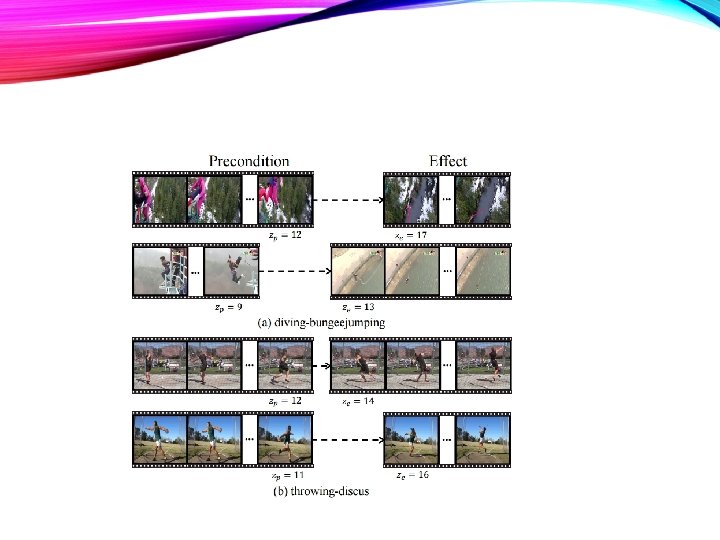
• Initialize network weights with pre-trained Two-Stream Network. • Repeat: • Forward propagation and feature computing for each frame • Search Latent variables: • such that • Calculate joint loss • Perform back-propagation
• Objective: Spatial stream Conv. Net Spatial Distance Score Temporal stream Conv. Net • Model fusion: • 2 x. Temporal. Score + Spatial. Score Temporal Distance Score
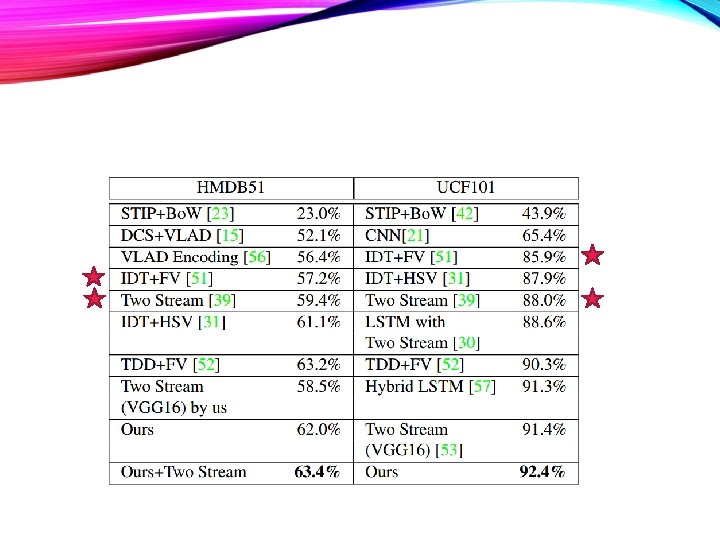
• UCF-101 • HMDB 51 • ACT
• ACT • 11648 videos • 43 classes • 16 super classes