La voiture sans chauffeur JeanPaul Haton LORIAINRIA Universit



 Grand Challenge DARPA 2005 : 212 km")
 Urban Challenge DARPA 2007 : 96 km en ville")
")















- Slides: 24
La voiture sans chauffeur Jean-Paul Haton LORIA/INRIA, Université de Lorraine à Nancy Institut Universitaire de France 1
Plan de l’exposé • Introduction • Les débuts • La « Google car » • Aspects légaux • Conclusion
Véhicules autonomes : Stanford Cart JP Haton Nancy 2013 3
Véhicules autonomes : Stanley (Stanford U. ) Grand Challenge DARPA 2005 : 212 km en 7 heures JP Haton Nancy 2013 4
Véhicules autonomes : Boss (CMU) Urban Challenge DARPA 2007 : 96 km en ville en moins de 6 heures JP Haton Nancy 2013 5
Le Cycab du LORIA (2000)
Classement officiel de la National Highway Traffic Safety Administration Level 0: The driver completely controls the vehicle at all times. Level 1: Individual vehicle controls are automated, such as electronic stability control (correcteur de trajectoire) or automatic braking. Level 2: At least two controls can be automated in unison, such as adaptive cruise control (régulateur de vitesse) in combination with lane keeping. Level 3: The driver can fully cede control of all safety-critical functions in certain conditions. Level 4: The vehicle performs all safety-critical functions for the entire trip, with the driver not expected to control the vehicle at any time.
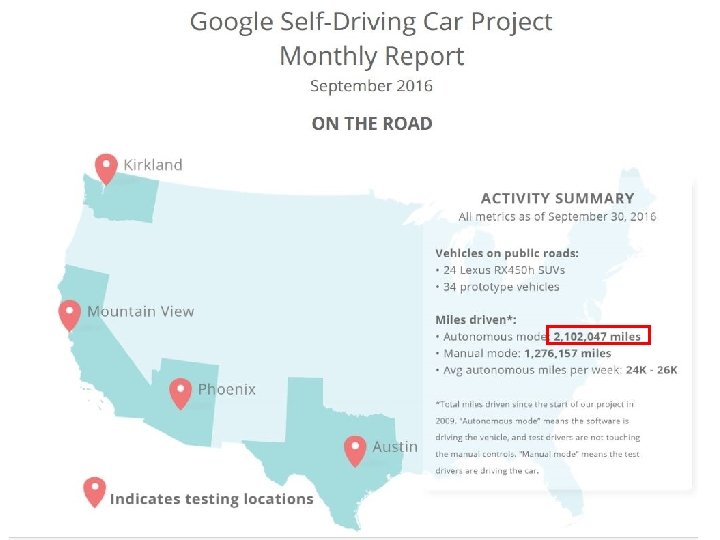
« Google car »
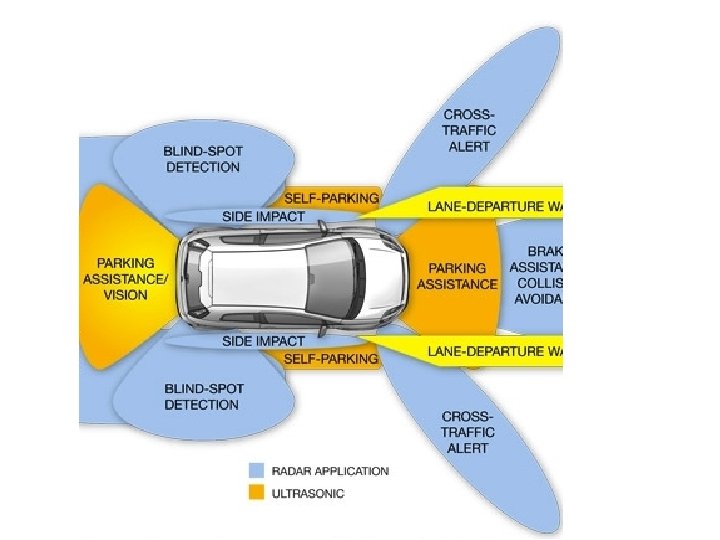
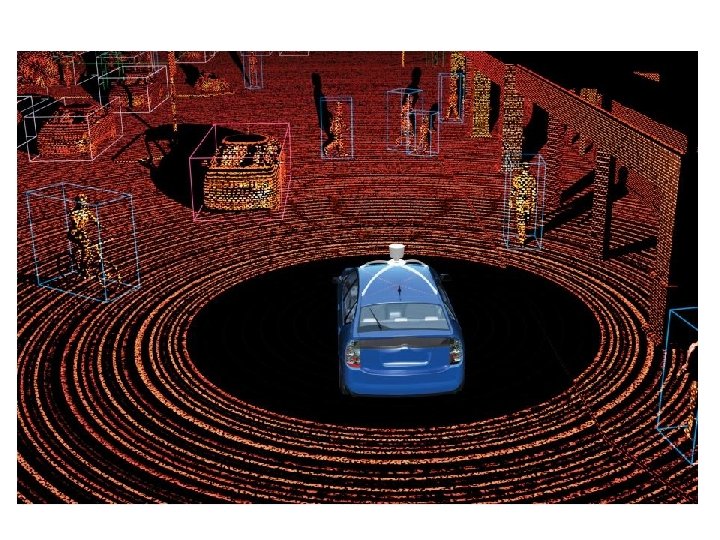
Trois composantes -Cartes Google : base de données d’informations sur la route - Capteurs : caméra vidéo, capteurs de distance (radar, lidar), estimateurs de position (sur les roues), GPS très précis - Intelligence artificielle : prises de décision
Trois composantes -Cartes Google : base de données d’informations sur la route - Capteurs : caméra vidéo, capteurs de distance (radar, lidar), estimateurs de position (sur les roues), GPS très précis - Intelligence artificielle : prises de décision
Cartes et bases de données - Vitesses limites Intersections à venir État du trafic Incidents sur la route Changements de direction Informations très détaillées venant compléter le GPS
Trois composantes -Cartes Google : base de données d’informations sur la route - Capteurs : caméra vidéo, capteurs de distance (4 radars, lidar), estimateurs de position (sur la roue G), GPS très précis (20 cm) - Intelligence artificielle : prises de décision
Les capteurs
JP Haton Nancy 2013 19
Trois composantes -Cartes Google : base de données d’informations sur la route - Capteurs : caméra vidéo, capteurs de distance (radar, lidar), estimateurs de position (sur les roues), GPS très précis - Intelligence artificielle : prises de décision
Intelligence artificielle But de l’agent conducteur : amener le passager à sa destination de façon sûre et « légale » Actions effectuées : - niveau d’accélération (cf. VAL) - instant de ralentissement et d’arrêt - instant de virage - Connaissances - identification d’obstacles et - Planification prise de décision - Traitement du signal et d’images - Reconnaissance de formes - Décision bayésienne - Apprentissage - Recherche heuristique - Fusion de données - Traitement du signal
Aspects non scientifiques… - Légalité : : Convention de Vienne sur la circulation routière (1968) : "tout véhicule en mouvement ou tout ensemble de véhicules en mouvement doit avoir un conducteur". adaptation de la législation (Nevada, Californie, GB, Ile de Man, …)
Aspects légaux En 2013, la Grande-Bretagne a autorisé le test de voitures autonomes sur les routes publiques. . et l’île de Man!
Aspects non scientifiques… - Légalité : : Convention de Vienne sur la circulation routière (1968) : "tout véhicule en mouvement ou tout ensemble de véhicules en mouvement doit avoir un conducteur". adaptation de la législation (Nevada, Calif. , GB, Man, ) - Responsabilité : civile, assurance, … - Psychologie : automatisation progressive… (radar et caméras de recul anti-collision, créneau automatique, régulateur de vitesse adaptatif, gestion des angles morts, alerte de franchissement de ligne, échange d’informations entre véhicules, etc. ) - Politique : emploi …
Les trucks d’Uber Komatsu Les roboats d’Amsterdam
Affaire à suivre… Merci!