Internal models adaptation and uncertainty Reza Shadmehr Johns




 Vaziri, Diedrichsen, Shadmehr, J Neurosci 2006")











: Error causes")





- Slides: 23
Internal models, adaptation, and uncertainty Reza Shadmehr Johns Hopkins School of Medicine Joern Diedrichsen Konrad Koerding Maurice Smith Ali Ghazizadeh Siavash Vaziri
Internal models predict the sensory consequences of motor commands Duhamel, Colby, & Goldberg Science 255, 90 -92 (1992)
Motor commands muscles Bayesian mixture Integration Forward model force Measured sensory consequences Body part Sensory system Proprioception Vision Audition Predicted sensory consequences State change
Reach endpoints with respect to target Time (msec) Vaziri, Diedrichsen, Shadmehr, J Neurosci 2006
Variance in reach errors indicates an integration of the predicted and actual sensory consequence of oculomotor commands Estimate of target location Measured sensory input Integration Motor commands Forward model Sensory system Predicted sensory consequences Vaziri, Diedrichsen, Shadmehr, J Neurosci 2006
What are internal models good for? Improve ability to sense the world. By predicting the sensory consequences of motor commands, and then integrating it with the actual sensory feedback, the brain arrives at an estimate that is better than is possible from sensation alone. Motor commands muscles Bayesian mixture Integration Forward model force Measured sensory consequences Body part Sensory system Proprioception Vision Audition Predicted sensory consequences State change
Saccadic target jump experiments: gain reduction 30% Eye Target X Equivalent to muscles being too strong Mc. Laughlin 1967
Savings: when adaptation is followed by de-adaptation, motor system still exhibits recall Saccade gain = Result 1: After changes in gain, monkeys exhibit recall despite behavioral evidence for washout. + _ Eye displacement Target displacement + Kojima et al. (2004) J Neurosci 24: 7531. _ + _
Offline learning: with passage of time and without explicit training, the motor system still appears to learn + _ + Result 2: Following changes in gain and a period of darkness, monkeys exhibit a “jump” in memory. Kojima et al. (2004) J Neurosci 24: 7531.
Motor adaptation as concurrent learning in two systems: A fast learning system that forgets quickly A slow learning system that hardly forgets prediction Prediction error Learning Smith, Ghazizadeh, Shadmehr PLOS Biology, 2006
Savings: de-adaptation may not erase adaptation Task reversal period re-adaptation Trial number Smith, Ghazizadeh, Shadmehr PLOS Biology, 2006
Hidden states The Bayesian learner’s interpretation of prediction error Slow change A fast change Context perturbation
Offline learning: Passage of time has asymmetric affects on the fast and slow systems Task reversal period “dark” period re-adaptation Slow state Fast state Trial number Smith, Ghazizadeh, Shadmehr PLOS Biology, 2006
The learner’s view about the cause of motor errors 1. Perturbations that can affect the motor plant have multiple time scales. Some perturbations are fast: muscles recover from fatigue quickly. Some perturbations are slow: recovery from disease may be slow. 2. Faster perturbations are more variable (have more noise). 3. Disturbances result in error, which can be observed, but with sensory noise. 4. The problem of learning is one of credit assignment: when I observe a disturbance, what is the time-scale of this perturbation? 5. To solve this problem, the brain must keep a measure of uncertainty about each possible timescale of perturbation. Koerding, Tenenbaum, Shadmehr, unpublished
Savings: de-adaptation does not washout the adapted system Spontaneous recovery Simulation Koerding, Tenenbaum, Shadmehr, unpublished
What prediction dissociates the two models? Model 1 (Smith et al. ): Error causes changes in multiple adaptive processes. Fast adaptive processes are highly responsive to error, but quickly forget. Slowly adaptive processes respond poorly to error, but retain their changes. Prediction: When actions are performed with zero error, states of the adaptive processes decay, but at different rates. Model 2 (Koerding et al. ): Motor system is disturbed by processes that have various timescale (fatigue vs. disease). Credit assignment of error depends on uncertainty regarding what is the timescale of the disturbance. Prediction: When there actions but the sensory consequences cannot be observed, states decay at various rates, but uncertainty grows. Increased uncertainty encourages learning.
Adapting without uncertainty Model 1: After a period of “darkness”, there will be spontaneous recovery, but rate of re-adaptation will be the same as initial learning. Task reversal period “dark” period re-adaptation Slow state Fast state Trial number Smith, Ghazizadeh, Shadmehr PLOS Biology 2006
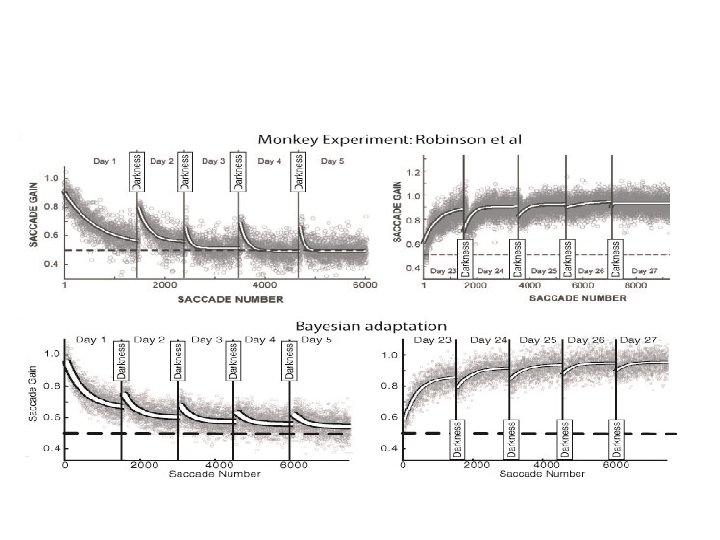
Adapting with uncertainty Model 2: After a period of “darkness”, there will be spontaneous recovery, but the rate of re-adaptation will be faster than initial learning. Bayesian learner Monkey data from Kojima et al. (2004). Simulations from Koerding, Tenenbaum, Shadmehr, unpublished
Sensory deprivation may increase uncertainty, resulting in faster learning 1 1000 Darkness Monkeys were trained each day, but between training sessions they put on dark goggles, reducing their ability to sense consequences of their own motor commands. 2000 3000 Saccade number Robinson et al. J Neurophysiol, in press
Adapting with uncertainty: some predictions Sensory deprivation Faster subsequent rate of learning. Example: A subject that spends a bit of time in the dark will subsequently learn faster than a subject that spends that time with the lights on. Why: In the dark, uncertainty about state of the motor system increases. Longer inter-stimulus interval Better retention. Example: A subject that trains on n trials with long ITI will show less forgetting than one that trains on the same n trials with short ITI. Why: events that take place spaced in time will be interpreted as having a long timescale.
Summary By combining the predictions of internal models with sensory measurements, the brain ends up with less noisy estimates of the environment than is possible with either source of information alone. Joern Diedrichsen Siavash Vaziri A prediction error causes changes in multiple adaptive systems. Some are highly responsive to error, but rapidly forget. Others are poorly responsive to error but have high retention. This explains savings and spontaneous recovery. Ali Ghazizadeh Maurice Smith Konrad Koerding Fast and slow adaptive processes arose because disturbances to the motor system have various timescales (fatigue vs. disease). When faced with error, the brain faces a credit assignment problem: what is the timescale of the disturbance? To solve this problem, the brain likely keeps a measure of uncertainty about the timescales.