Institute for Information Industry III Research Report 20180925
 Research Report 2018/09/25 黃季軒 0935090120 tazdingo. Huang@gmail. com")




 97. 7% Recall (non-road) 87. 0% • Reference:")






 • PCA is used. • Four features are used: 1. Linearity:")
 • Suitable for consuming unordered point sets in 3 D. •")

 Random Forest Point Net Class Precision Recall Pedestrian Signal 70%")
 Random Forest Point Net Class Precision Recall Pedestrian Signal 78%")
 Random Forest Point Net Class Precision Recall Pedestrian Signal 67%")
 Random Forest Point Net Class Precision Recall Pedestrian Signal 80%")

- Slides: 21
Institute for Information Industry (III) Research Report 2018/09/25 黃季軒 0935090120 tazdingo. Huang@gmail. com
Urban Scene Point Cloud Segmentation Point Cloud Road Surface Points Segmentation Road Points Non-road Points Road Markings Detection Pole-like Objects Segmentation and Classification
Road Surface Points Segmentation • Input: original point cloud. • Output: road points.
Method Point Cloud Get 4 Features of Each Point Classify Road Points and Non-road Points Using Random Forest Classifier Road Points Non-road Points
Method • Features used in the classification are related to the eigenvalues and eigenvectors obtained from a principal component analysis (PCA) applied to the coordinates of the neighbors of each point of the cloud. • Four features are used: 1. Linearity: How elongated the neighborhood is. 2. Planarity: How well it is fitted by a plane. 3. Scattering: High scattering values correspond to an isotropic and spherical neighborhood. 4. Verticality: How vertical the neighborhood is.
Results Precision 94. 8% Recall (road) 97. 7% Recall (non-road) 87. 0% • Reference: S. Guinard and L. Landrieu. Weakly supervised segmentation-aided classification of urban scenes from 3 d Li. DAR point clouds. In ISPRS 2017, 2017.
Road Markings Detection • Input: road points. • Output: vectors of lines, bounding boxes of road markings.
Method 1. Extract high reflectivity points in ground points. 2. Classify connected components by their region properties.
Results : Road markings. : Centerlines. : Turning lines.
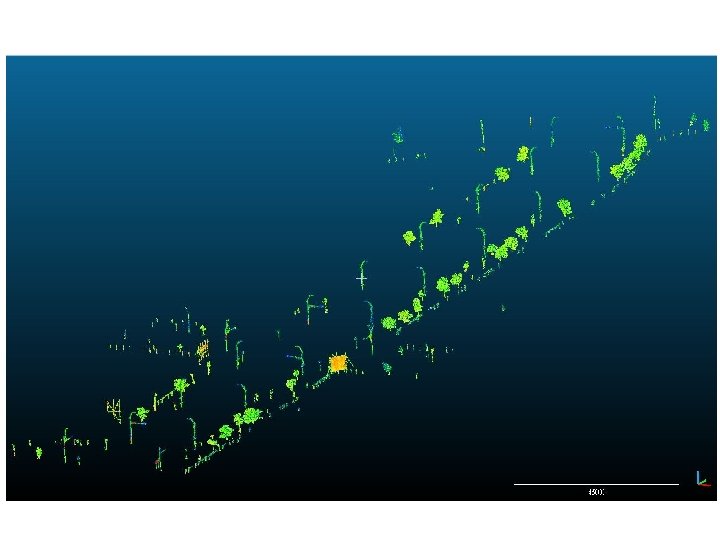
Pole-like Objects Segmentation and Classification • Input: Urban scene non-road points. • Output: Segmented pole-like objects. Original point cloud scene. Segmented objects.
Method Non-road Points Segment Pole-like Objects in Point Cloud Get 4 Features of Each Pole-like Object Classify Pole-like Object Using Random Forest Classifier Classify Pole-like Object Using Point. Net Pole-like Objects’ Classes
Segment Pole-like Objects in Point Cloud 1. Voxelize the point cloud. 2. Locate isolated objects with a small horizontal section. 3. Consider vertical continuity and minimum height. 4. Get connected component.
Method (Random Forest) • PCA is used. • Four features are used: 1. Linearity: How elongated the neighborhood is. 2. Planarity: How well it is fitted by a plane. 3. Scattering: High scattering values correspond to an isotropic and spherical neighborhood. 4. Height
Method (Point. Net) • Suitable for consuming unordered point sets in 3 D. • Capture local structures from nearby points. • Invariance under transformations.
Pole-like Objects A B C D pedestrian signal street light traffic sign Pedestrian Signal 103 Street Light 282 Traffic Light 167 Traffic Sign 35 data set
Classification Results (Dataset 1) Random Forest Point Net Class Precision Recall Pedestrian Signal 70% 92% Pedestrian Signal 81% 68% Street light 95% 90% Street light 90% 95% Traffic Light 97% 71% Traffic Light 94% 100% Traffic Sign 25% 44% Traffic Sign 43% 38% Over all accuracy: 82% Average accuracy: 72% Over all accuracy: 88% Average accuracy: 77%
Classification Results (Dataset 2) Random Forest Point Net Class Precision Recall Pedestrian Signal 78% 81% Pedestrian Signal 100% Street light 93% 96% Street light 100% 98% Traffic Light 95% 93% Traffic Light 97% 100% Traffic Sign 86% 67% Traffic Sign 100% Over all accuracy: 90% Average accuracy: 88% Over all accuracy: 99% Average accuracy: 99%
Classification Results (Dataset 3) Random Forest Point Net Class Precision Recall Pedestrian Signal 67% 62% Pedestrian Signal 83% 91% Street light 84% 90% Street light 95% 91% Traffic Light 93% 100% Traffic Light 100% 92% Traffic Sign 67% 22% Traffic Sign 43% 100% Over all accuracy: 84% Average accuracy: 78% Over all accuracy: 91% Average accuracy: 80%
Classification Results (Dataset 4) Random Forest Point Net Class Precision Recall Pedestrian Signal 80% 62% Pedestrian Signal 100% 76% Street light 88% 93% Street light 97% 98% Traffic Light 87% 95% Traffic Light 89% 97% Traffic Sign 50% 38% Traffic Sign 33% 50% Over all accuracy: 85% Average accuracy: 76% Over all accuracy: 92% Average accuracy: 80%
Classification Results Over all accuracy Average recall Random Forest 85. 25% 78. 50% 74. 75% Point Net 92. 50% 84. 00% 87. 13%