REPASO G 6 4 Ejes principales de inercia



 = Rz. T( ). Veamos otra forma de obtener la matriz")
![Se pueden convencer, usando MATLAB o Mathematica, etc: Con MATLAB haciendo: >> [R valores_propios]=eig([1](https://slidetodoc.com/presentation_image_h2/3f8b95075971d45c486f640e9201b156/image-5.jpg "Se pueden convencer, usando MATLAB o Mathematica, etc: Con MATLAB haciendo: >> [R valores_propios]=eig([1")






- Slides: 15
REPASO G 6. 4 Ejes principales de inercia.
Ejemplo: Ejes principales de inercia para una distribución discreta de masas.
i. e. = 67. 5 | Para obtener la matriz ortogonal que diagonaliza al tensor de inercia precisamos una rotación de ángulo – , que deshaga la rotación en que los vectores propios v 1 y v 2 están rotados. Veamos como escribir una matriz de ángulo respecto al eje z o 3, Rz( ): = R 11 R 12 R 21 R 22 R z ( ) Rz (- ) = Rz. T( ) z
Rz (- ) = Rz. T( ). Veamos otra forma de obtener la matriz de rotación Recordando que la matriz diagonal se obtiene: D= RIIQRT Y R se obtiene en el caso general como la matriz cuyas columnas son los vectores propios : En nuestro caso tenemos: v 1 v 2 … 0. 383 2 3 Entonces: R 0. 924 0. 383
Se pueden convencer, usando MATLAB o Mathematica, etc: Con MATLAB haciendo: >> [R valores_propios]=eig([1 1 0; 1 3 0; 0 0 1]) R= -0. 9239 0 0. 3827 0 0. 9239 0 1. 0000 0 valores_propios = 0. 5858 0 0 0 1. 0000 0 3. 4142
Veamos otro ejemplo de diaginalizacion del tensor de inercia. Para ello, volvamos al: Ejemplo: Tensor de inercia de un cubohomogéneo de densidad r, masa M y arista de longitud b. Con el origen de coordenadas en uno de los vértices y los tres ejes de coordenadas sobre las tres aristas contiguas correspondientes a dicho vértice.
Ejercicio: Obtenga los momentos de inercia principales.
Uso de las simetrías de sistemas rígidos para calcular momentos de inercia
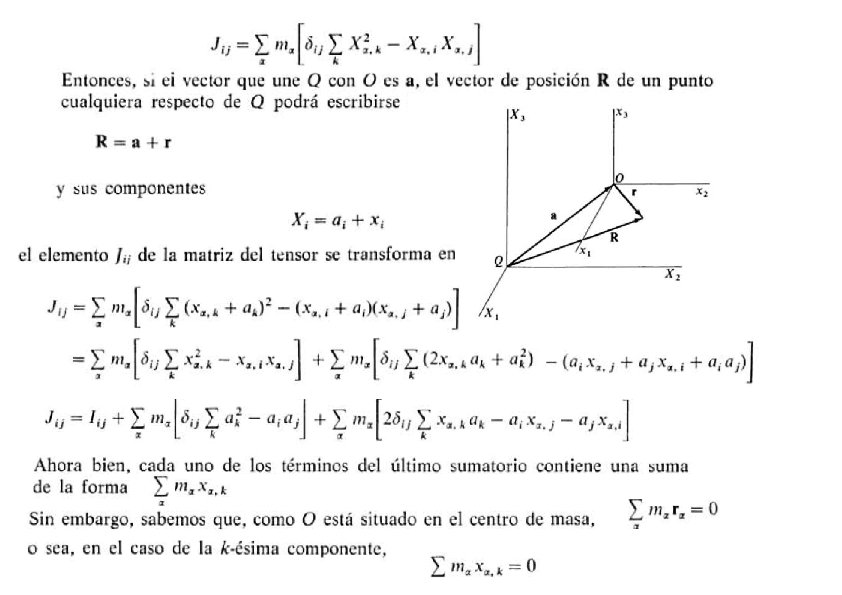
Momentos de inercia para distintos sistemas de coordenadas del cuerpo y teorema de Steiner. En consecuencia, supongamos otro sistema de coordenadas Xi, fijo también respecto del cuerpo y cuyos ejes tengan la misma orientación que los xi originales, pero cuyo origen Q no coincida con el origen 0 (situado en el centro de nasa del cuerpo). Q puede encontrarse tanto en el interior coma en el exterior del cuerpo en cuesti 6 n. Recordemos que las componentes del tensor de inercia respecto al centro de masa se pueden escribir como:
Teorema de Steiner
Teorema de Steiner para momentos de inercia. Consideremos en particular cómo vincular los momentos de inercia correspondientes a dos ejes paralelos en la dirección u que pasan por G y un punto O respectivamente , Sean IG, u e IO, u esos momentos: Ejercicio: probar que ambos momentos de inercia estan conectados de la siguiente forma