PFNet Point Fractal Network for 3 D Point









 error • and GT")




 + If we regard")
- Slides: 16
PF-Net: Point Fractal Network for 3 D Point Cloud Completion CVPR 2020 Zitian Huang 1, Yikuan Yu 1, 2, Jiawen Xu 1, Feng Ni 2, Xinyi Le 1∗ 1 Shanghai Jiao Tong University, 2 Sense. Time Present by Zhixuan Li
Task: 3 D Point Cloud Completion
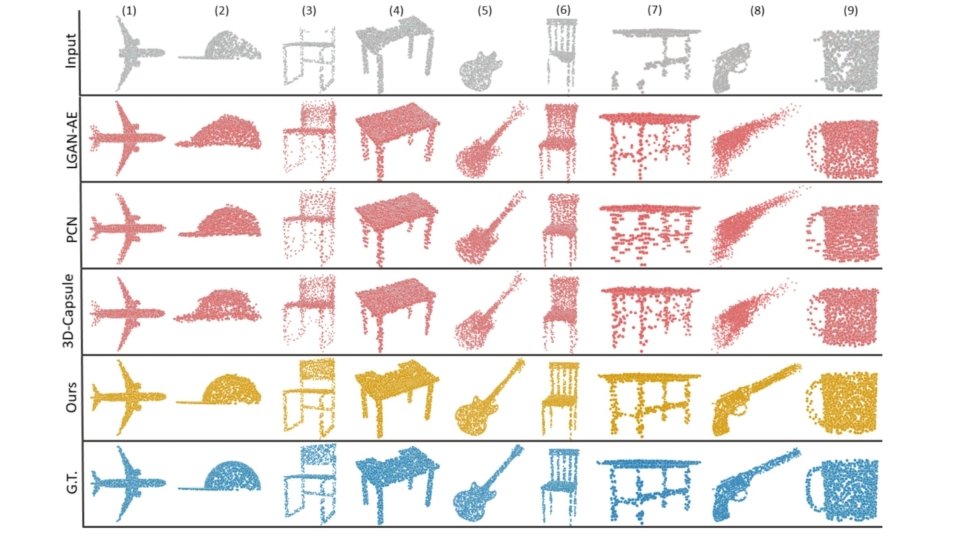
Compare with previous methods • genus-wise distortions • missing cross-bar input LGAN-AE PCN 3 D-Capsule This paper GT
Method overview Multi-resolution encoder-decoder
IFPS downsampling • a method from POINTNet++ • iterative farthest point sampling We want to sample N points 1. randomly choose one initial point 2. find the farthest point, add to sampled set 3. iteratively execute for N-1 times Advantage: IFPS can represent the distribution of the entire point sets better compared to random sampling, and it is more efficient than CNNs * Point. Net++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space, NIPS 2017
CMLP • Reserve all features from inner layers
Point Pyramid Decoder • FC and conv • Compute loss of three resolutions
Adversarial Loss • Further boost performance
Experiments Dataset • benchmark dataset Shapenet-Part • 13 categories are used • total number of shapes sums to 14473 (11705 for training and 2768 for testing)
Experiments Metric • Pred → GT (prediction to ground truth) error • and GT → Pred (ground truth to prediction) error • Pred → GT error computes the average squared distance from each point in prediction to its closest in ground truth. • It measures how difference the prediction is from the ground truth.
Compare with SOTA Point cloud completion results of overall point cloud.
Compare with SOTA Point cloud completion results of the missing point cloud.
Robustness Test 1 • Lose different proportion Yellow represents the prediction. Grey denotes the undamaged point cloud. lose 25%, 75% points 50%,
Robustness Test 2 • loss points in two random positions each time Yellow represents the prediction. Grey denotes the undamaged point cloud.
Comments + genus-wise distortions (propose to only predict missing part) + If we regard segmentation mask as outlier curve, may be the amodal completion problem could be transferred as this paper