Motor DC DC Motor Un motor DC consiste


![%% Motor Parameters R = 2. 0; % Motor resistance [Ohms] L = 0.](https://slidetodoc.com/presentation_image_h2/5c27e3b240a413440014a208ac8decf1/image-4.jpg "%% Motor Parameters R = 2. 0; % Motor resistance [Ohms] L = 0.")

![Defina los subsistemas individuales de planta. Gtorque = tf(Km, [L R]); % armature current](https://slidetodoc.com/presentation_image_h2/5c27e3b240a413440014a208ac8decf1/image-7.jpg "Defina los subsistemas individuales de planta. Gtorque = tf(Km, [L R]); % armature current")

![%%Sistema de primer orden: subsistema mecánico % Transfer Function Model Gspeed= tf(1, [J Kf])](https://slidetodoc.com/presentation_image_h2/5c27e3b240a413440014a208ac8decf1/image-9.jpg "%%Sistema de primer orden: subsistema mecánico % Transfer Function Model Gspeed= tf(1, [J Kf])")

- Slides: 10
Motor DC
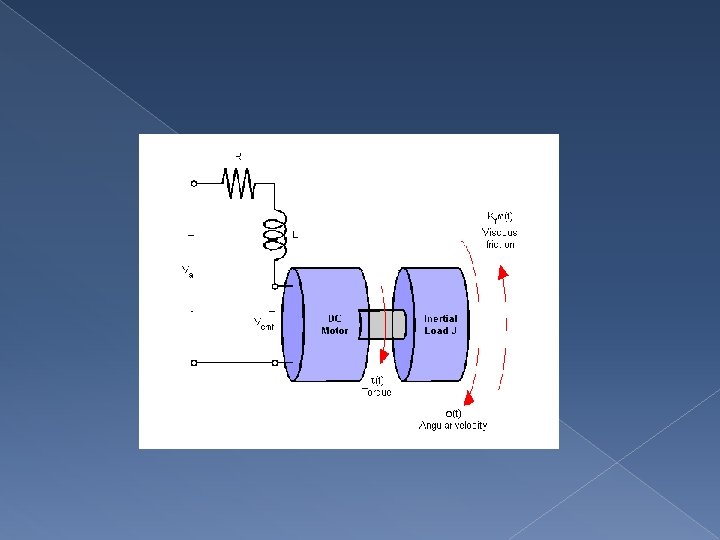
DC Motor Un motor DC consiste de dos partes: � El componente eléctrico representa la armadura, la cual puede ser caracterizada por su resistencia {R}, por la inductancia {L} y la constante de torque del motor {Km}. La constante de fuerza contraelectromotriz {Kemf} determina el voltaje de fuerza contraelectromotriz. El componente mecánico consiste de un eje de transmisión y de una carga inercial {J}, así como la componente de fricción viscosa {Kf}. Copyright 1984 -2009 The Math. Works, Inc.
%% Motor Parameters R = 2. 0; % Motor resistance [Ohms] L = 0. 5; % Motor inductance [Henrys] Km = 0. 1; % Torque constant Kemf = 0. 1; % Back EMF consant Kf = 0. 2; % Drag coefficient [Nms] J = 0. 02; % Load inertia[kg. m^2/s^2]
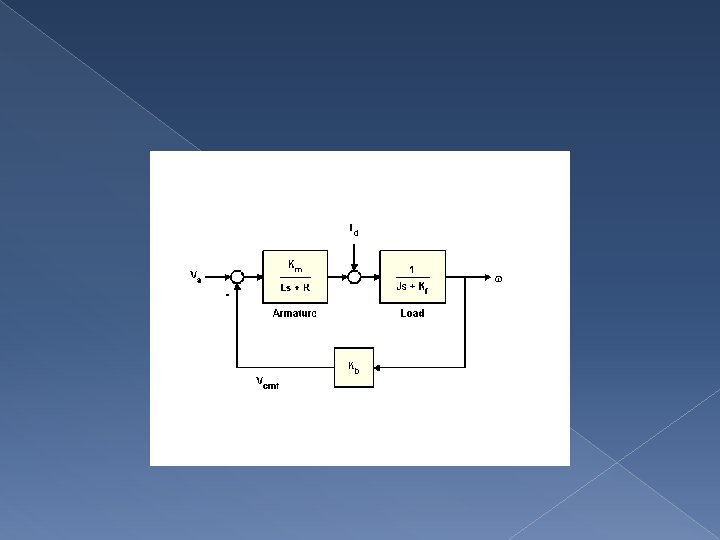
Representación de función de transferencia El motor DC puede ser modelado usando la siguiente función de transferencia: num = [Km]; den = [J*L (Kf*L+J*R) (Kf*R+Kemf*Km)]; dcmotor_sys. TF = tf(num, den) % ss(dcmotor_sys. TF) step(dcmotor_sys. TF)
Defina los subsistemas individuales de planta. Gtorque = tf(Km, [L R]); % armature current dynamics Gspeed = tf(1, [J Kf]); % shaft angular speed dynamics % Conecte los subsistemas individuales Gdc_motor = feedback(Gspeed*Gtorque, Kemf) %close the back-emf loop % Grafique la respuesta temporal y en frecuencia de el sistema figure step(Gdc_motor) title('Step Response of DC Motor Plant') figure bode(Gdc_motor) grid on title('Frequency Response of DC Motor Plant')
%% Sistema de primer orden: Subsistema eléctrico % Transfer Function Model Gtorque = tf(Km, [L R]) step(Gtorque) % Zero-pole-gain Model Gtorque_zpk = zpk(Gtorque) % Poles elec_poles = pole(Gtorque)
%%Sistema de primer orden: subsistema mecánico % Transfer Function Model Gspeed= tf(1, [J Kf]) step(Gspeed) % Zero-pole-gain Model Gspeed_zpk = zpk(Gspeed) % Poles mech_poles = pole(Gspeed)
%% Comparando las constantes de tiempo t = 0: 0. 01: 1; % Electrical time constant tc_e = -1/elec_poles % time constant ytc_e = step(Gtorque, tc_e); % response at time constant y_e = step(Gtorque, t); % step response % Mechanical time constant tc_m = -1/mech_poles % time constant ytc_m = step(mech_sys_tf, tc_m); % response at time constant y_m = step(mech_sys_tf, t); % step response