xyz block rotation 0 local differential rotation block
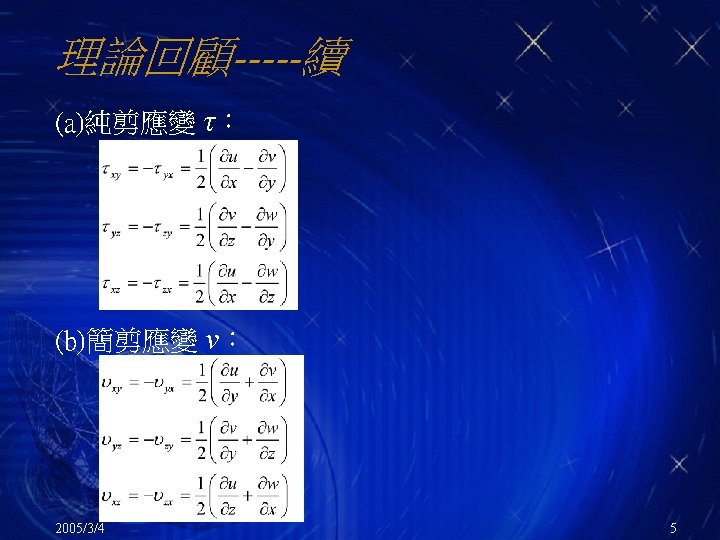
 ω0 與局部微旋轉(local differential rotation) δω ¨ 區塊旋轉(block rotation) ,")
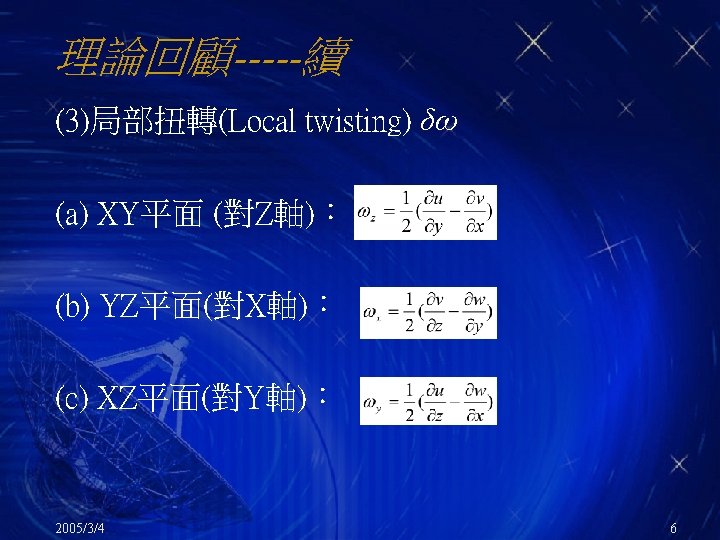
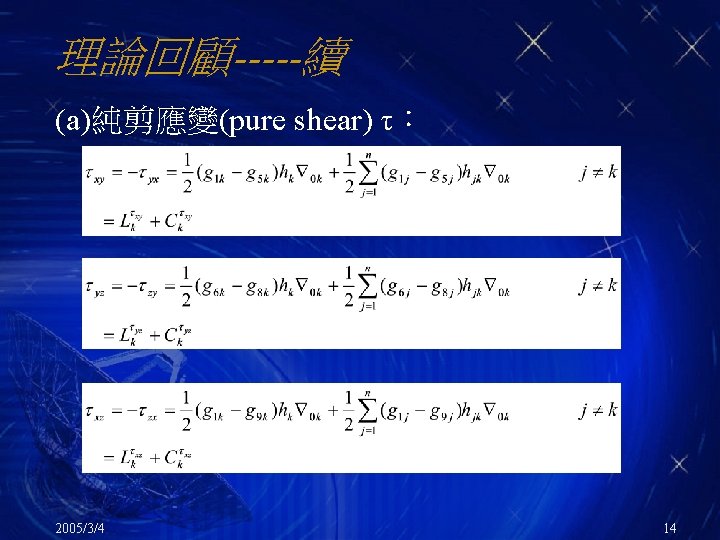
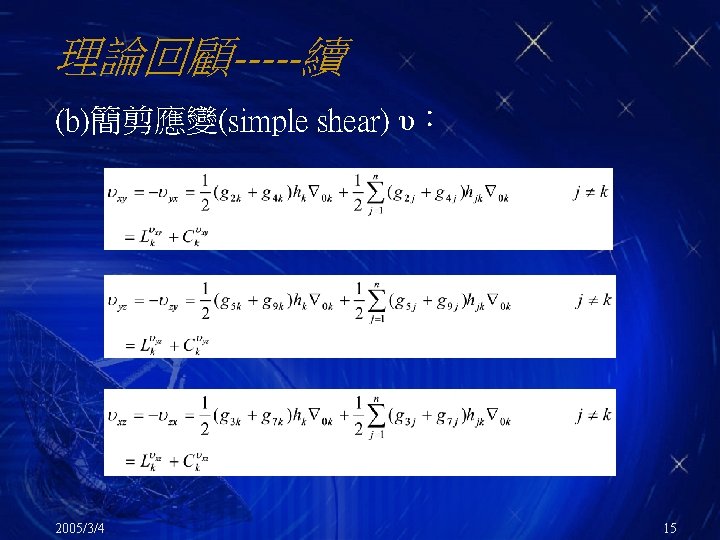
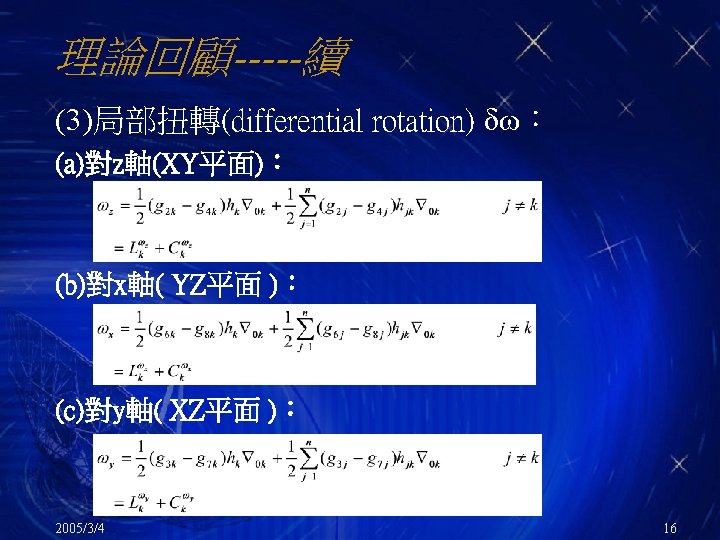
理論回顧-----續 ¨ ωx、ωy、ωz分別都可再區分為區塊旋轉 (block rotation) ω0 與局部微旋轉(local differential rotation) δω ¨ 區塊旋轉(block rotation) , , ¨ 局部微旋轉(local differential rotation) , 2005/3/4 , 7
 Y(m) Z(m) A 547854. 61")
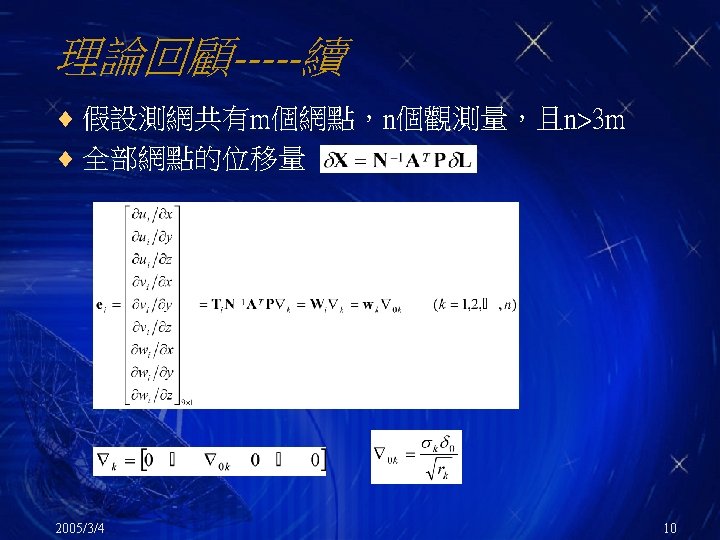
模擬實驗 ¨ 實驗配置: 表 1 模擬實驗之點位座標 點位 2005/3/4 X(m) Y(m) Z(m) A 547854. 61 705133. 04 3976. 23 B 567093. 75 676208. 44 2854. 17 1 559937. 68 693896. 12 3547. 86 2 545675. 27 674395. 02 2631. 48 3 595512. 23 693475. 26 3418. 27 4 565106. 19 707132. 73 4032. 91 5 534876. 15 686425. 36 3349. 75 17
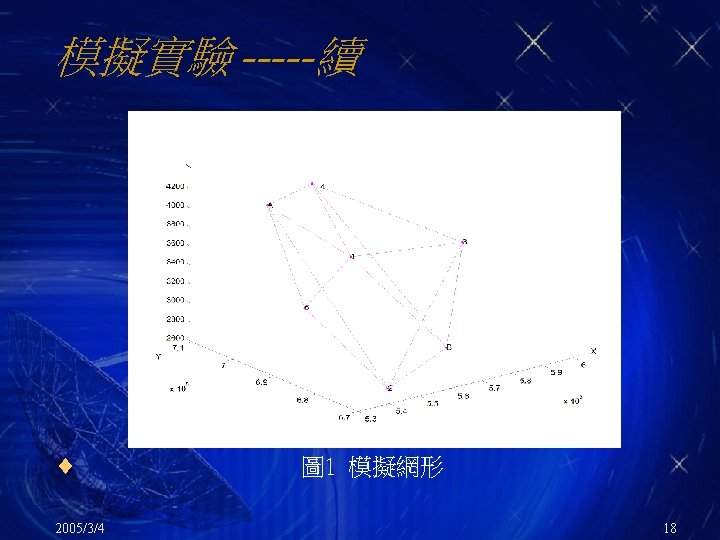
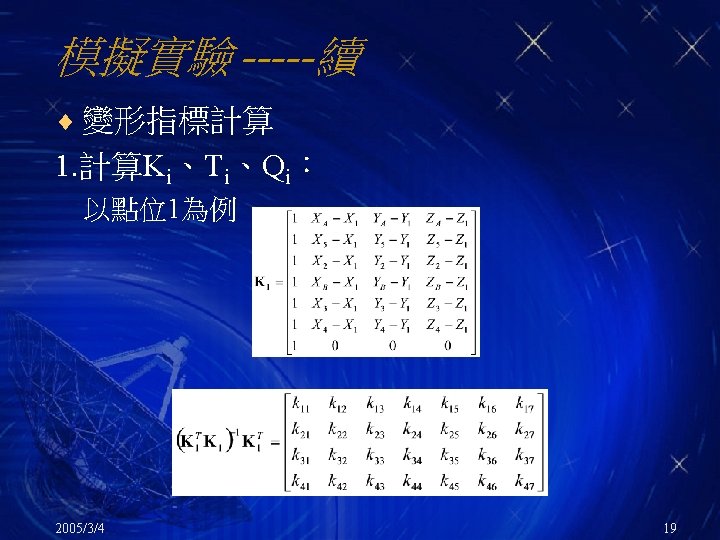

表 4 實驗分析出的 uk、rk、 ▽ 0 k 結果 編號 1 1 1. 4877 E-13 7. 2594 E+06 2 1 -2. 4913 E-13 5. 6097 E+06 3 1 -2. 6290 E-12 1. 7269 E+06 4 1 6. 6169 E-14 1. 0885 E+07 5 1 -6. 1728 E-14 1. 1270 E+07 6 1 -6. 8603 E-12 1. 0690 E+06 7 1 -4. 3272 E-12 1. 3460 E+06 8 1 5. 8731 E-14 1. 1554 E+07 9 1 -6. 3505 E-14 1. 1111 E+07 10 1 -5. 5467 E-13 3. 7596 E+06 11 1 -2. 7400 E-13 5. 3491 E+06 12 1 1. 5142 E-11 7. 1957 E+05 13 1 -6. 8678 E-13 3. 3787 E+06 14 1 4. 3410 E-14 1. 3439 E+07 15 1 2. 3548 E-13 5. 7701 E+06 2005/3/4 22

模擬實驗 -----續 ¨ 穩健度分析 1. 各點位的平均應變 點位 平均應變 Mean strain 2005/3/4 1 3. 4631 E+10 2 2. 2847 E+10 3 5. 3893 E+10 4 7. 0765 E+11 5 1. 4674 E+10 23

模擬實驗 -----續 2. XY平面上各點位的穩健度量測 點位 2005/3/4 總剪應變 微旋轉 局部微旋轉 Total shear Diff. rotation Local D. R. 1 7. 2820 E+07 1. 8470 E+07 8. 4915 E+06 2 4. 2017 E+07 1. 7200 E+07 9. 6544 E+06 3 9. 2464 E+07 8. 9804 E+06 2. 6188 E+07 4 1. 0251 E+09 5. 7568 E+07 3. 1208 E+07 5 1. 0251 E+09 4. 0002 E+07 1. 4748 E+07 24

模擬實驗 -----續 3. YZ平面上各點位的穩健度量測 點位 2005/3/4 總剪應變 微旋轉 局部微旋轉 Total shear Diff. rotation Local D. R. 1 3. 4631 E+10 6. 9875 E+08 2. 5479 E+08 2 2. 2848 E+10 6. 1843 E+08 5. 8065 E+08 3 5. 3898 E+10 1. 2834 E+09 4. 5183 E+08 4 7. 0765 E+11 1. 9043 E+09 1. 1544 E+09 5 2. 7739 E+10 6. 9624 E+08 7. 9041 E+08 25

模擬實驗 -----續 4. XZ平面上各點位的穩健度量測 點位 2005/3/4 總剪應變 微旋轉 局部微旋轉 Total shear Diff. rotation Local D. R. 1 3. 4558 E+10 9. 2976 E+08 1. 9633 E+08 2 2. 2806 E+10 9. 2976 E+08 2. 0981 E+08 3 5. 3804 E+10 9. 2976 E+08 6. 9675 E+08 4 7. 0663 E+11 1. 4132 E+09 8. 7959 E+08 5 2. 7689 E+10 1. 0467 E+09 3. 4833 E+08 26
 Robustness")
參考文獻 1. Vaníček P, Krakiwsky EJ, Craymer MR, Gao Y, Ong P (1991) Robustness analysis, Contract Report, Geodetic Survey Division, Canada Centre for Surveying, Energy, Mines and Resources, Canada. 2. 李旭志,2004,Robustness Anlysis of 3 D Network, 中興大學。 3. R. Hsu , S. Li , 2004, Decomposition of deformation primitives of horizontal geodetic networks: application to Taiwan’s GPS network, Taiwan, J. of Geodesy. (accepted) 4. 李偉菘, 2003, 台灣一等GPS網之穩健度分析, 碩士 論文, 台灣大學 2005/3/4 29

報告完畢 2005/3/4 30
- Slides: 30