X by wire sensor MCU Actuator In Vehicular


차세대 지능형 자동차의 추구 목표 편의 주행 안전 주행 쾌적 주행 X by wire sensor MCU Actuator In Vehicular Network Harness wires : weight, installation time and costs
 • 기존 자동차 배선 Lamp Sensor Switch Sensor Lamp Sensor •")
In-Vehicle Network (IVN) • 기존 자동차 배선 Lamp Sensor Switch Sensor Lamp Sensor • IVN기반 자동차 배 선 Lamp Sensor Switch Sensor Control Module Sensor Lamp Sensor Bus Line motor Switch Controller Wiring Harness Sensor Lamp motor Sensor motor Switch Sensor Lamp Control Module motor Switch Control Module motor Sensor motor Lamp
![IVN의 종류별 전송속도 Telematics Data rate [bits/s] Embedded Control 25 M D 2 B,](http://slidetodoc.com/presentation_image/50ad92ff6d4f0b062c53f7dd2b664097/image-5.jpg "IVN의 종류별 전송속도 Telematics Data rate [bits/s] Embedded Control 25 M D 2 B,")
IVN의 종류별 전송속도 Telematics Data rate [bits/s] Embedded Control 25 M D 2 B, MOST Optical ring 10 M Flexray, TTx Time triggered (TDMA) Fault tolerant, dependable 2 x 2 wire/optical 1 M 125 K 20 k CAN-C Bluetooth, UWB Arbitration (CSMA) Fault dual wire Wireless medium CAN-B Arbitration Fault tolerant dual wire LIN Time triggered Master-slave Single wire, no quartz 0. 5 J 1850 1 2. 5 5 Relative communication cost per node

Wired AND Configuration Level +5 V l 0 -level : dominant level l 1 -level : recessive level S 1 S 2 S 3 0 1 0 1 0 0 1 1 Bus 0 0 0 0 1 BUS line S 1 E 1 S 2 E 2 S 3 E 3
 S R O T F 10")
CSMA/CR (Carrier Sense Multiple Access with Collision Resolution) S R O T F 10 9 8 7 6 5 4 3 2 1 0 R Control Node 1 Data Listen Only Node 2 Control Node 3 Listen Only Data recessive BUS dominant Control Data

Node 1 Node 2 Node 3 Node 4 CAN controller CAN transceiver ISO 11898 -2 CAN choke 120 ohm termination 5 4 3 2 1 0 3. 5 2. 5 1. 5 recessive 127 nodes CAN transceiver 120 ohm CAN _ H termination CAN _ L dominant recessive time

Tire Pressure Monitoring System “Low Cost, Low Power, Wireless Solution ”

CAN bus SD card interface Memory buffer CAN controller CAN transceiver JPEG encoder CISM GPS memory U-processor UART 가속도계 Car black box 구성도

CAN bus 임베디드 processor memory GPS UART 가속도계 LCD controller RF modem Memory buffer JPEG encoder SD card interface CAN controller CISM CAN transceiver Car black box / TPMS 통합 관리 단말기 구성도

영상 데이터 압축 camera Mx. N CMOS image sensor JPEG data Serial data Buffer for reading 8 x 8 2 dimensional 8 x 8 DCT Run Length Coding zigzag scan Quantization (h, v) 0 1 2 3 4 5 6 7 0 16 11 10 16 24 40 51 61 1 12 12 14 19 26 58 60 55 2 14 13 16 24 40 57 69 56 3 14 17 22 29 51 87 80 62 4 18 22 37 56 68 109 103 77 5 24 35 55 64 81 104 113 92 6 49 64 78 87 103 121 120 101 7 72 92 95 98 112 100 103 99 Quantization table
 automatic door open / lock (2) voice dialing to portable phone")
Speech recognition (1) automatic door open / lock (2) voice dialing to portable phone in car Image processing (1) automatic car parking based on recognition of parking line as well as car (2) alarm based on the recognition of heavy eye condition (3) automatic door open / lock based on the recognition of finger print (4) alarm based on the recognition of the deviation of driving lane

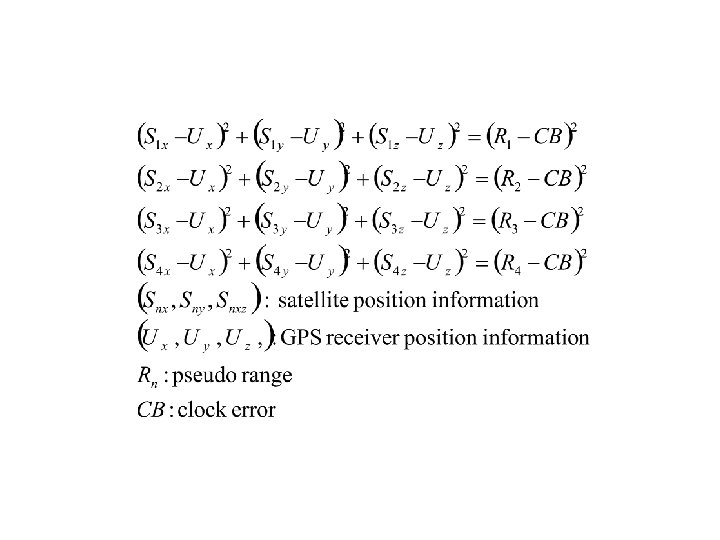
Global Position Satellite
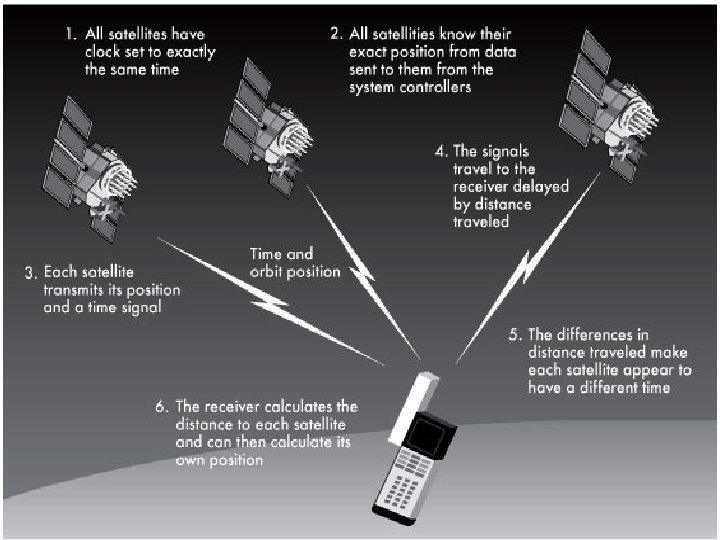

-Reference time -Satellite position 1. Generation of PN code based on reference time which was received from satellite 2. Search the same PN code phase Clock in GPS satellite is correct, but the clock in the GPS receiver has time error. - calculate the delayed time due to propagation time between GPS satellite and GPS receiver : dt - pseudo distance : C x dt = R
")
DSRC (dedicated short range communication)

Man machine interface Tx RF antenna circulator DSP CAN ECU Rx RF Man machine interface Tx RF antenna DSP SW CAN ECU Rx RF Antenna RF unit Signal processing unit Vehicle control Recognition unit Vehicle control unit
 Radar gun")
Radar (radio detecting and ranging) Radar gun

Radar gun

High resolution Another method for range detection using correlation method with PN code Correlation with the reflected signal ( spread with PN code)

Reflected signal time PN code period
 방식 Frequency Transmitted signal Received signal time")
FMCW (Frequency Modulated Continuous Wave) 방식 Frequency Transmitted signal Received signal time

2대의 카메라, stereo vision을 이용 한 근거리 측정 D L B x. L D: L = f : x. L D : (B-L) = f : x. R Bf = D(x. L+x. R) Lf =Dx. L Bf-Lf=Bf-Dx. L=Dx. R D=Bf/(x. L+x. R) f x. R
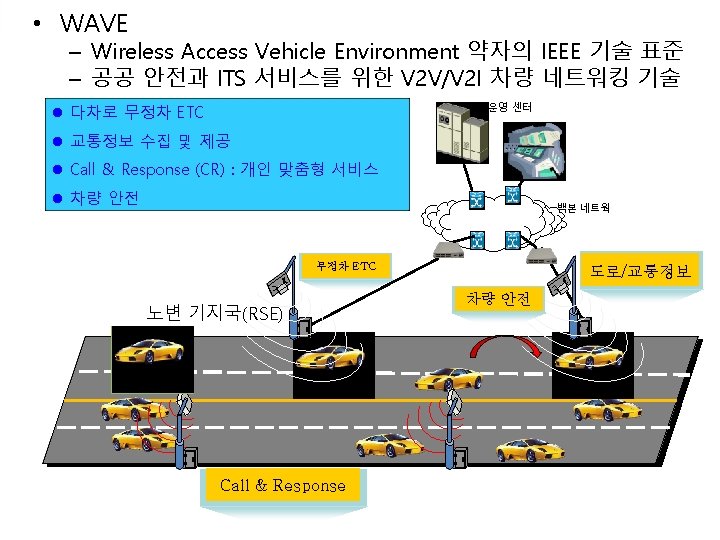

l 고속 이동성, 고속 패킷 전송, low Latency, V 2 V/V 2 I 통신을 지원 지원통신방식 WAVE V 2 V V 2 I WLAN Wi. Bro Low (20 km/h) 100 10 Data rate (Mbps) 10초 WLAN 1초 Wi. Bro DSRC Medium (60 km/h) High 이동성 (200 km/h) Latency WLAN Wi. Bro WAVE 1 0. 1초 WAVE/ DSRC Low (20 km/h) Medium High 이동성 (60 km/h) (200 km/h) Low (20 km/h) Medium (60 km/h) 이동성 High (200 km/h)

DC generator N S force brush commutator light Left hand’s law Magneti c field current

Motor N S force Magneti c field current Right hand’s law
 motor S S N N N N S S S N")
Brushless DC (BLDC) motor S S N N N N S S S N

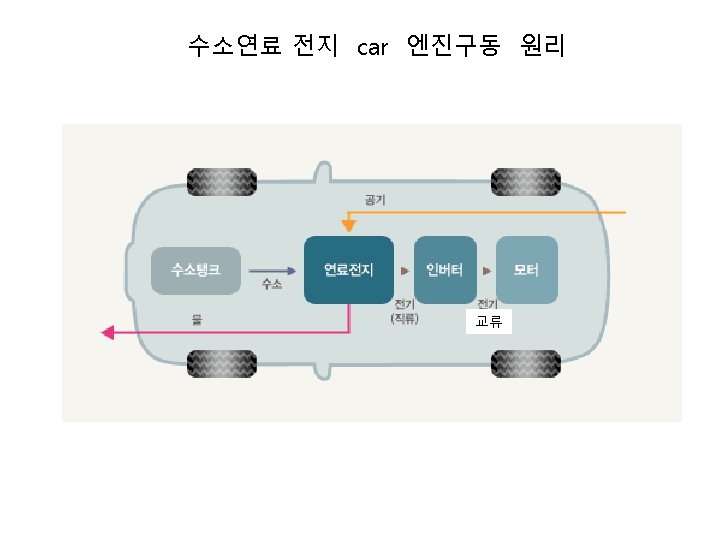
Hydrogen Fuel Cell Hydrogen fuel load Oxygen From air
- Slides: 43