What can modeldata fusion really tell us about

What can model-data fusion really tell us about the terrestrial C cycle? M Williams, B Law & T Quaife

Outline u Why do we need model-data fusion in terrestrial ecosystems ecology? u The Ensemble Kalman Filter for improved state estimation u Assimilating Earth Observation data via the En. KF u Assimilation as a tool for testing and improving models

Improving estimates of C dynamics MODELS OBSERVATIONS -Clear confidence limits -Capable of interpolation MODELS & forecasts -Subjective & inaccurate? -Incomplete, patchy FUSION ANALYSIS Complete ANALYSIS with clear confidence limits & capable of forecasts

The Kalman Filter Initial state At Forecast MODEL P Ensemble Kalman Filter Ft+1 Predictions OPERATOR F´t+1 Assimilation At+1 Analysis Observations Dt+1
 Flux tower (2000 -2) Sap flow Soil/stem/leaf")
Observations – Ponderosa Pine, OR (Bev Law) Flux tower (2000 -2) Sap flow Soil/stem/leaf respiration LAI, stem, root biomass Litter fall measurements

Rtotal & Net Ecosystem Exchange of CO 2 Af Cfoliage Lf Rh Ra GPP Ar Croot Lr Clitter D 6 model pools 10 model fluxes 9 parameters 10 data time series Aw Cwood Lw C = carbon pools A = allocation L = litter fall R = respiration (auto- & heterotrophic) C SOM/CWD Temperature controlled

Setting up the analysis u Initial conditions and model parameters – Set bounds and run multiple analyses u Data uncertainties – Based on instrumental characteristics, and comparison of replicated samples. u Model uncertainies – Harder to ascertain
 Williams et al (2005)")
Time (days since 1 Jan 2000) Williams et al (2005)

= observation — = mean analysis | = SD of the analysis Time (days since 1 Jan 2000) Williams et al (2005)
 Williams et al (2005)")
Time (days since 1 Jan 2000) Williams et al (2005)

= observation — = mean analysis | = SD of the analysis Time (days since 1 Jan 2000) Williams et al (2005)

Data brings confidence = observation — = mean analysis | = SD of the analysis Williams et al (2005)
 Checking mass balance Time (days since 1 Jan 2000)")
Cumulative NEP (g. C m-2) Checking mass balance Time (days since 1 Jan 2000)

Assimilating EO reflectance data DA At+1 MODISt+1 Ft+1 Radiative transfer Reflectancet+1 At DALEC

EO assimilation to improve photosynthesis predictions Model only Assimilating MODIS NDVI Source: Tristan Quife = observation — = mean analysis | = SD of the analysis

Using time series to improve models Initial state At Forecast MODEL P Ft+1 Predictions OPERATOR F´t+1 Assimilation At+1 Analysis Observations Dt+1

Augment the state vector Initial state At P Forecast MODEL Ft+1 P Predictions OPERATOR F´t+1 Assimilation At+1 P Analysis Observations Dt+1

Twin Experiments u Use a model to generate the truth u Sample the truth to generate observations u Attempt to reconstruct the truth from the observations

Truth; fuzzy observations NEE = -101 g. C m-2

Biased parameters No assimilation NEE = +220± 103 g. C m-2 = observation — = mean analysis | = SD of the analysis

Biased parameters Assimilation NEE = -72± 10 g. C m-2 = observation — = mean analysis | = SD of the analysis

Adapted parameters NEE = -104± 12 g. C m-2
")
Adapted parameters Constant parameters Cumulative NEP (g. C m-2)

Conclusions u En. KF is a powerful and robust means for state estimation u En. KF is capable of assimilating EO reflectances via augmentation of the state vector u En. KF can be used to estimate parameters and so can improve capabilities for model forecasts u En. KF can help identify bias in data and models

Thank you

Ensemble Kalman Filter: Prediction ψ is the state vector j counts from 1 to N, where N is ensemble number k denotes time step, M is the model operator or transition matrix dq are model errors (mean zero and covariance Q) error statistics can be represented approximately using an appropriate ensemble of model states Generate an ensemble of observations from a distribution mean = measured value, covariance = estimated measurement error. dj = d + ej d = observations e = drawn from a distribution of zero mean and covariance equal to the estimated measurement error

Ensemble Kalman Filter: Update ψ f = forecast state vector ψ a = analysed estimate generated by the correction of the forecast H is the observation operator, a matrix that relates the model state vector to the data, so that the true model state is related to the true observations by dt=H t Ke is the Kalman filter gain matrix, that determines the weighting applied to the correction

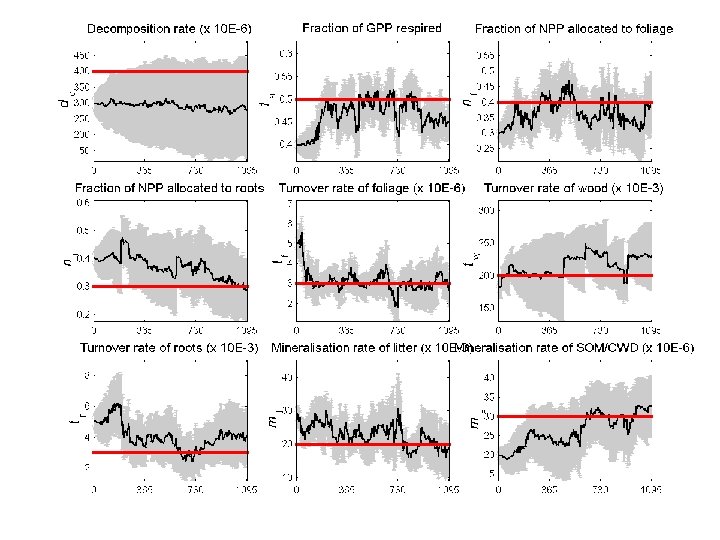
Parameter uncertainty u Vary nominal parameters and initial conditions ± 20% u Generate 400 sets of parameters and IC’s, and then generate analyses u Accept all with unbiased estimates of NEP (N=189) u The mean of the NEE analyses over three years for unbiased models (-421± 17 g. C m-2) was little different to the nominal analysis ( 419± 29 g C m-2)
- Slides: 29