Viewing geometry What fraction of the incident light

 = 1 if i = e & i +")
")
 Given: (1) light source (2) viewer position (3) surface reflectance")
 image intensity I(x, y)")



- Slides: 9
Viewing geometry What fraction of the incident light is reflected toward the viewer? Reflectance Function: Φ(i, e, g) irradiance surface irradiance 1
Reflectance functions Φmirror(i, e, g) = 1 if i = e & i + e = g = 0 otherwise Φmatte(i, e, g) = ρ cos i if i < 90° = 0 otherwise ρ: albedo 2
Representing surface orientation using stereographic projection sphere has radius = 1 g (f, g) = (0, 2) (f, g) = (2, 0) f viewer 3
Reflectance Map R(f, g) Given: (1) light source (2) viewer position (3) surface reflectance properties R(f, g) relates brightness to surface orientation Image Irradiance Equation: I(x, y) = I 0 * ρ(x, y) * R(f, g) 4
Ikeuchi & Horn shape-from-shading algorithm Three sources of constraint: (1) image intensity I(x, y) = I 0 * ρ(x, y) * R(f, g) (known viewer direction, light source direction, surface reflectance properties) (2) surface smoothness e. g. minimize total variation in surface (3) points of known surface orientation e. g. occluding boundaries, shadow boundaries 5
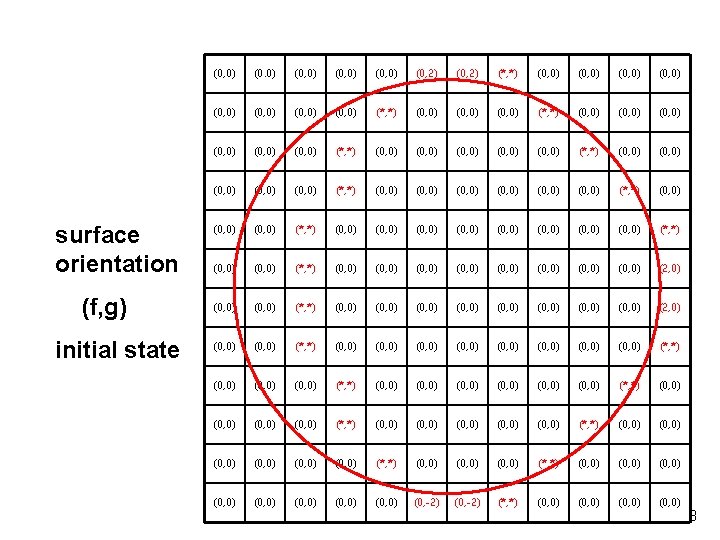
Simplified Ikeuchi & Horn algorithm Construct initial solution with f = g = 0 everywhere, except at points of known surface orientation (e. g. occluding boundary) Let fi(x, y) & gi(x, y) denote surface orientations at iteration i To determine fi+1(x, y) & gi+1(x, y): For each location (x, y) (1) Compute the average value of fi(x, y) in a neighborhood around (x, y): f* (2) Compute the average value of gi(x, y) in a neighborhood around (x, y): g* (3) Find the contour of possible f and g values in R(f, g) that are consistent with I(x, y) (4) Find the point on this contour that is closest to the surface orientation given by (f*, g*) – the coordinates of this point represent the new surface orientation for location (x, y): fi+1(x, y) & gi+1(x, y) 6
image of shaded sphere 0 0 0 0 0. 1 0 0 0 0 0. 2 0. 4 0. 3 0. 2 0. 1 0 0 0. 2 0. 3 0. 5 0. 7 0. 6 0. 3 0. 2 0. 1 0 0 0. 2 0. 3 0. 6 0. 8 0. 9 0. 6 0. 2 0 0 0 0 0. 3 0. 4 0. 7 0. 9 1. 0 0. 8 0. 5 0. 3 0 0 0. 2 0. 3 0. 6 0. 8 0. 9 0. 6 0. 2 0 0 0. 2 0. 3 0. 5 0. 7 0. 6 0. 3 0. 2 0. 1 0 0 0. 2 0. 4 0. 3 0. 2 0. 1 0 0 0 0 7
Koenderink & colleagues Subjects’ qualitative impressions of shape were consistent, but subjects differed quantitatively in amount of depth perceived Analysis is not strictly local – global factors play a role 9