Vektorok mtrixok Vektorok Alapfogalmak Vektor az irnytott skban

Vektorok, mátrixok
 szakaszt vektornak nevezzük. Ekkor: pontosan specifikáljuk")
Vektorok - Alapfogalmak Vektor: az irányított (síkban, térben) szakaszt vektornak nevezzük. Ekkor: pontosan specifikáljuk a végpontok sorrendjét (kezdőpont, végpont) is. Alternatív definíció: egy n dimenziós vektor egy rendezett szám n-s, azaz n db szám együttese adott sorrendben. Vektor abszolút értéke: Egy adott v vektor abszolút értékén a v vektor hosszát értjük. Jelölés: |v| P. : Számítsuk ki az alábbi ábrán látható 2 vektor abszolút értékét! Alkalmazva Pitagorasz-tételt 2)Descartes-koordinátákat 1)

Vektorok - Alapfogalmak Nullvektor: azt a v vektort, melynek abszolút értéke 0 (kezdő és végpontja azonos), nullvektornak (zérusvektornak) nevezzük. Jelölés: 0 Zérusvektor iránya: tetszőleges Egységvektor: azt a vektort, melynek hossza egységnyi, egységvektornak nevezzük. Jelölés: e, i, j, k Egyező állású vektorok: két vektor egyező állású, ha párhuzamosak vagy azonosak Egyenlő vektorok: két vektor akkor és csakkor egyenlő, ha hosszuk, állásuk és irányuk megegyezik. Ekkor: a két adott vektorra létezik olyan eltolás, mely az egyik vektor kezdőpontját és végpontját a másik vektor kezdőpontjába és végpontjába viszi át.

Vektorok – Műveletek vektorokkal Vektorok összeadása: polygon módszer segítségével. Lényegileg: nyílfolyam-módszer: eltolás, a második vektor kezdőpontját az első végpontjába, és így tovább. Összeg vektor: az első vektor kezdőpontjából az utolsó vektor végpontjába mutató vektor. (Két vektor esetén paralelogramma módszernek) Összeadás tulajdonságai: 0. Zárt: összeadás eredménye is vektor 1. Kommutatív (ld. ábra): a+b=b+a 2. Asszociatív: (a+b)+c=a+(b+c) 3. Létezik egységelem: a+0=a 4. Létezik inverz (ellentett) elem: a+(-a)=0 , ahol –a az a vektor ellentett vektora
+c=a+(b+c) b")
Vektorok – Műveletek vektorokkal P: Mutassuk meg, hogy a vektor összeadás asszociatív!Vagyis (a+b)+c=a+(b+c) b a c P: Adjuk össze az alábbi vektorokat! c a b

Vektorok – Műveletek vektorokkal Vektorok kivonása: inverz vektor elem hozzáadása Vagyis: a, b vektorok különbségén azt a vektort értjük, melyet hozzáadva b vektorhoz összegként az a vektort kapjuk. Vektorok kivonása nem kommutatív művelet!

Vektorok – Műveletek vektorokkal Vektorok szorzása Számot vektorral: számmal való szorzás Jelölés: 1. 1. Vektort vektorral-eredménye szám, neve: skalárszorzat (dot product) Jelölés: ab Vektort vektorral-eredménye vektor, neve: vektoriális (vagy kereszt) szorzat (cross product) Jelölés:
 Számot vektorral: számmal való szorzás Jelölés:")
Vektorok – Műveletek vektorokkal Vektorok szorzása (skalár szorzat) Számot vektorral: számmal való szorzás Jelölés: Az a vektor l-szorosán, ahol l tetszőleges valós szám, azt a vektort értjük, melynek abszolút értéke: állása megegyezik az a vektor állásával iránya: azonos a irányával, ha ellentettje a irányának, ha tetszőleges, ha Vagyis: nyújtás (l>1), zsugorítás(0<l<1), tükrözés (l<0) Tulajdonságai: 1. λa=aλ 2. μ(λa)=(μ λ)a (definícióból közvetlenül adódik) 3. (λ+μ)a=λa+μa (definícióból közvetlenül adódik) 4. λ(a+b)= λa+λb
 Vektort vektorral-eredménye szám, neve: skalárszorzat (dot")
Vektorok – Műveletek vektorokkal Vektorok szorzása (skaláris szorzat) Vektort vektorral-eredménye szám, neve: skalárszorzat (dot product) Jelölés: Skaláris szorzat: Legyen adott két azonos dimenziójú (a, b) vektor és az általuk bezárt szög (a). Ekkor az alábbi számot az a és b vektorok skaláris szorzatának nevezzük. Ebben az esetben a két vektor hajlásszögén: azt a 0≤l ≤ 180 szöget értjük, melyet a két vektor félegyenese bezár (a belső, mindig kisebb hajlásszög). Következmények: 1) Két vektor skaláris szorzata akkor és csakkor nulla, ha a két vektor ortogonális. 2) Ha a két vektor közül az egyik nullvektor, a hajlásszög tetszőleges, de a skaláris szorzat értéke 0.
 Tulajdonságai: ab=ba")
Vektorok – Műveletek vektorokkal 1. 2. 3. 4. Vektorok szorzása (skaláris szorzat) Tulajdonságai: ab=ba a(b+c)=ab+ac (la)b=l (ab)=a(lb) nem asszociatív Geometriai jelentés: egy adott vektor merőleges vetületének a hossza
: Az vektorok keresztszorzatának nevezzük azt a")
Vektorok – Műveletek vektorokkal Vektorok szorzása (vektoriális (keresztszorzat): Az vektorok keresztszorzatának nevezzük azt a vektort, amelynek hossza: , ahol a a két vektor (a, b) által bezárt hajlásszög által állása: merőleges az a és b vektorok mindegyikére, vagyis a két vektor kifeszített síkra. iránya: olyan, hogy az a, b és axb vektorok jobbrendszert alkotnak. Geometriai jelentés: az alábbi kifeszített paralelogramma területét. számérték megadja a két vektor által
 1. 2. 3. 4. Tulajdonságai Nem")
Vektorok – Műveletek vektorokkal Vektorok szorzása (vektoriális (keresztszorzat) 1. 2. 3. 4. Tulajdonságai Nem kommutatív Disztributív axb=-(bxa) l(axb)=(la)xb=ax(lb) Következmény Két vektor keresztszorzata akkor és csakkor zérusvektor, ha a vektorok párhuzamosak egymással.

Koordinátarendszerek, 2 D sík, 3 D tér Felbonthatóság: ha adottak egy tetszőleges síkban az a és b nem párhuzamos vektorok, akkor a sík minden más v vektora egyértelműen felbontható az adott vektorokkal párhuzamos összetevőkre. Következménye: bázis: a sík bármely két, nem párhuzamos vektorát a síkbeli vektorok bázisának nevezzük. Koordináta: a v=aa+bb vektor (a, b) rendezett valós számpárt, mely egyértelműen meghatározza v-t az a, b bázisban a v vektor a, b bázisra vonatkoztatott koordinátának nevezzük. 2 D: a rendezett valós számpárokat síkbeli vektoroknak nevezzük. 3 D: a rendezett valós számhármasokat térbeli vektoroknak nevezzük. Síkbeli és térbeli vektorok ábrázolása koordinátarendszerekben történik, azok bázisainak megfelelő definiálásával.

Koordinátarendszerek, 2 D sík, 3 D tér Síkbeli vektorok ábrázolása Síkban végtelen sok bázist lehet felvenni Éppen ezért: speciális bázist alkalmazunk az egyértelműség kedvéért, mégpedig a Descartes koordinátarendszernek megfeleltetve, az alábbiak szerint. 1) 2) i és j egymásra merőleges egységvektorok i és j ennek megfelelően az x és y számegyenesek +1 pontjaiba mutatnak. y v j i x

Koordinátarendszerek, 2 D sík, 3 D tér Térbeli vektorok ábrázolása A rendezett valós számpárok halmaza, a sík pontjainak halmaza és az origóból kiinduló síkbeli vektorok halmaza között páronként kölcsönösen egyértelmű leképezés valósítható meg. Ezen kijelentés alapján: ha a, b, c térbeli vektorok nem esnek egy síkba, akkor a tér minden v vektora egyértelműen felbontható az a, b, c vektorokkal párhuzamos összetevőkre, azaz v=la+bb+gc=(l; b; g) Bázis: a tér egy pontjából kiinduló, nem egysíkú vektorát térbeli bázisnak nevezzük. Speciális bázis: i, j, k páronként merőleges egységvektorok jobbsodrású rendszere z P=(v 1; v 2; v 3) Ekkor: k i x i y

Referencia felvétele 2 D és 3 D vizsgálatokhoz Referenciarács, bázis, fixpont 3 D 2 D TKP

Műveletek a 3 D térben Alap műveletek Koordinátáival adott két vektor skaláris szorzata: P: Adja meg a(2; 1; 0) és b(1; -1; 2) vektorok skaláris szorzatát Két vektor hajlásszöge P: Számítsuk ki a(1; 2; 2) és b(-1; 1; 0) vektorok által bezárt szöget!

Műveletek a 3 D térben Koordinátáival adott két vektor kereszt szorzata: P: Adja meg a=2 i-3 k és b=i+j+k vektorok kereszt szorzatát

Mátrixok Mátrix: m×n-es mátrixon egy olyan téglalap alakú táblázatot értünk, amelynek m sora és n oszlopa van, elemei pedig adott számhalmazból valók, melyen a mátrix értelmezve van. Jelölés: Oszlopvektor Sorvektor nxm-es számtáblázat - n sor, m oszlop Jele: A, illetve An, m (n sor, m oszlop) A= An, m = (aij)
 Egység mátrix: Diagonál mátrix: Négyzetes mátrix:")
Speciális mátrixok: sorvektor, oszlopvektor, nullmátrix (összes eleme 0) Egység mátrix: Diagonál mátrix: Négyzetes mátrix: amn=anm Egy An, m mátrix sorainak és oszlopainak felcserélésével a mátrix A’m, n (= A*m, n = ATm, n ) transzponáltját kapjuk.

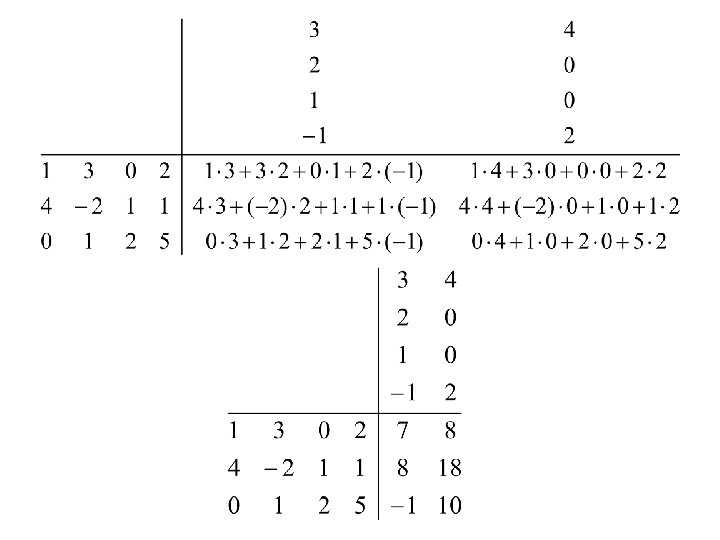
Mátrixok - Műveletek Mátrix szorzása skalárral: összes elemet az adott skalárral meg kell szorozni Mátrixok összeadása: azonos dimenzió Mátrixok szorzása: A minden sorvektorának képezzük a skalárszorzatát B minden oszlopvektorával. Ezért ha A típusa (n×m), akkor B típusa (m×k). Ez azt jelenti, hogy az A és B mátrix csak abban az esetben szorozható össze, ha A-nak ugyanannyi oszlopa van, mint ahány sora B-nek. A szorzatmátrix típusa ennek megfelelően (n×k). Tulajdonságok nem kommutatív asszociatív disztributív P: Szorozza össze az alábbi két mátrixot! M(megjegyzés): ha adott egy mátrix, mely egy végtag szegmensének irányvektorait tartalmazza és ezt a mátrixot megszorozzuk egy adott dimenziójú vektorral, akkor az a szegmensek adott rotációs tengely körüli elforgatását jelentik.

Példa: Adottak az alábbi A és B mátrixok. Végezze el az AB és a BA mátrix szorzást! Megoldás: Mivel A 3 x 4 -es és B 4 x 2 -es méretű mátrixok, ezért csak az AB szorzás végezhető el, a BA nem.

A determináns fogalma, kiszámítása és alkalmazása Definíció: A determináns a kvadratikus mátrixok halmazán értelmezett f: An A függvény, mely az An mátrixhoz egy valós számot rendel az alábbiak szerint: • n=2: A = det(a 1, a 2) = a 11 a 22 -a 12 a 21 • n 2: Sor- vagy oszlop szerinti kifejtéssel (n-1)x(n-1)–es mátrixok determinánsának kiszámítására vezetjük vissza – i. sor szerinti kifejtéssel: A = j aij Aij (i=állandó) – j. oszlop szerinti kifejtéssel: A = i aij Aij (j=állandó) ahol Aij az (ij)-edik (az i. sor j. eleméhez tartozó) algebrai aldetermináns.

Példa: Egy 2 x 2 -es mátrix determinánsa: Egy 3 x 3 -as mátrix determinánsának számítása az első oszlopa szerinti kifejtéssel:

Alkalmazás Az n egyenletből álló n ismeretlenes Ax=b lineáris egyenlet-rendszer megoldása, ha A 0: (i=1, 2, …, n) ahol di= det(a 1, …, ai-1, b, ai+1, …, an) Ha b=0 (homogén lineáris egyenletrendszer) és A 0, akkor (i=1, 2, …, n) Ez a homogén lineáris egyenletrendszer triviális megoldása. Ez a Cramer szabály.

Cramer-szabály Tekintsük az alábbi n egyenletből és n darab ismeretlenből álló lineáris egyenletrendszert: Legyen A az egyenletrendszer együtthatómátrixa, és tegyük fel, hogy A determinánsa nem 0. Ekkor ahol annak az mátrixnak a determinánsa, amit úgy kapunk, hogy az A mátrix i-edik oszlopát kicseréljük

Cramer-szabály Oldjuk meg az alábbi egyenletrendszert: Először kiszámoljuk az A determinánsát: Mivel A nem 0 ezért megoldható Cramer-szabállyal az egyenletrsz.

Cramer-szabály A vektort kicseréljük az A megtrix megfelelő oszlopaival, az így kapott mátrix determinánsával kapjuk a megoldásokat:

Cramer-szabály A megoldások:
- Slides: 30